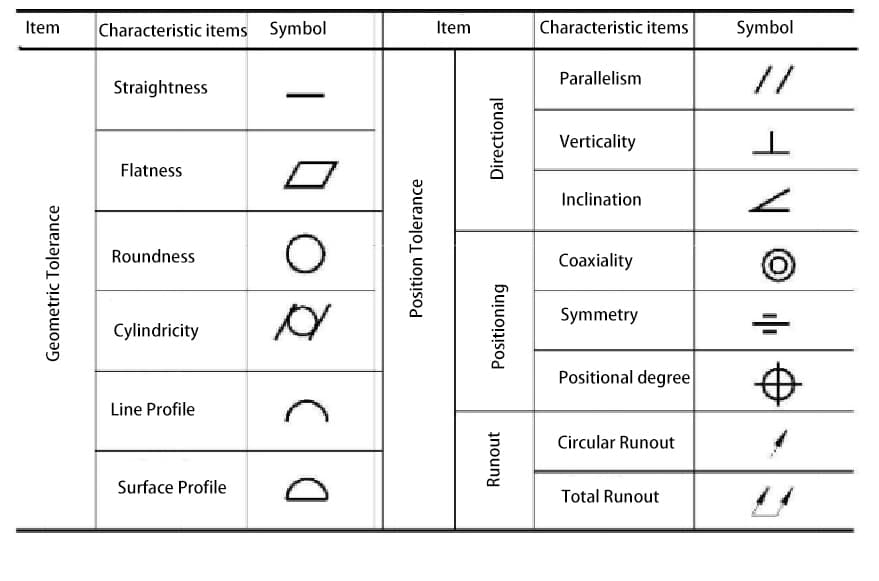
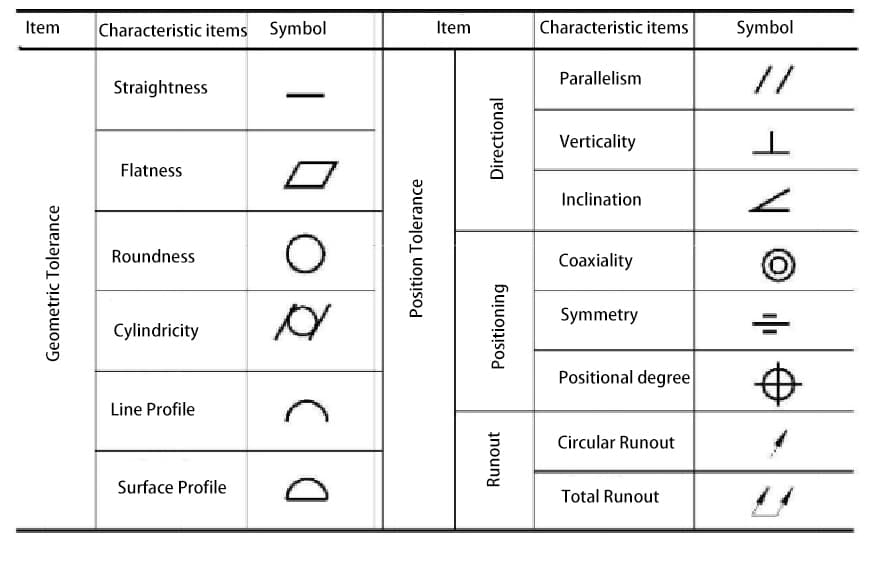
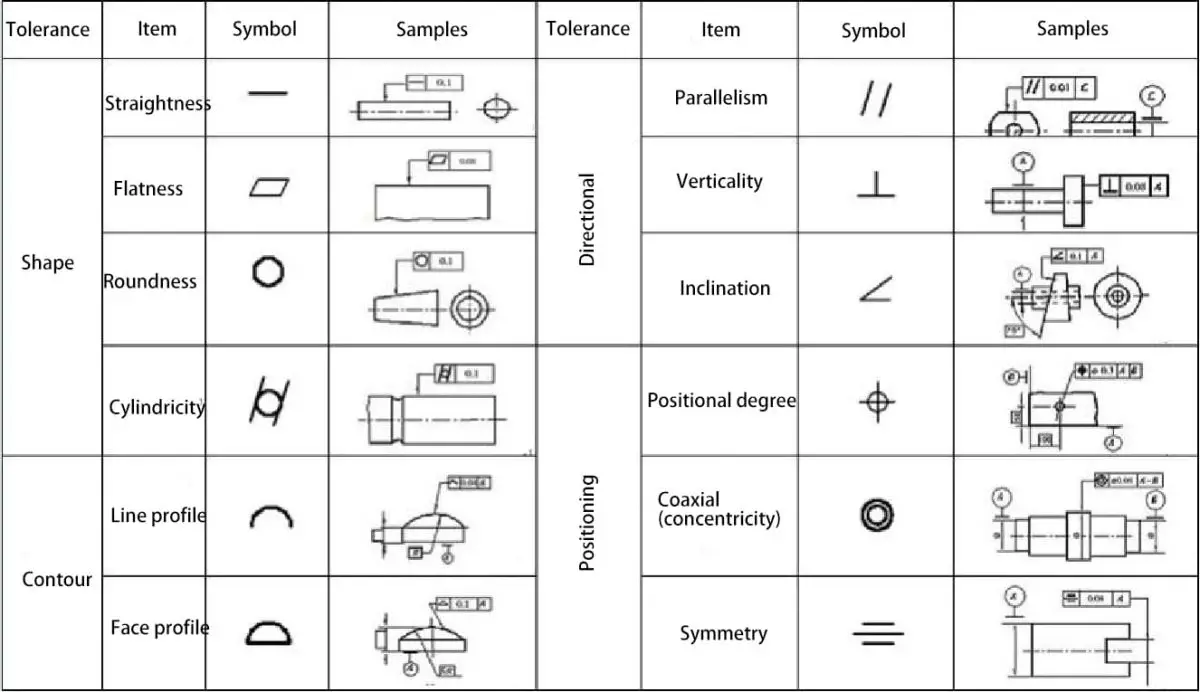
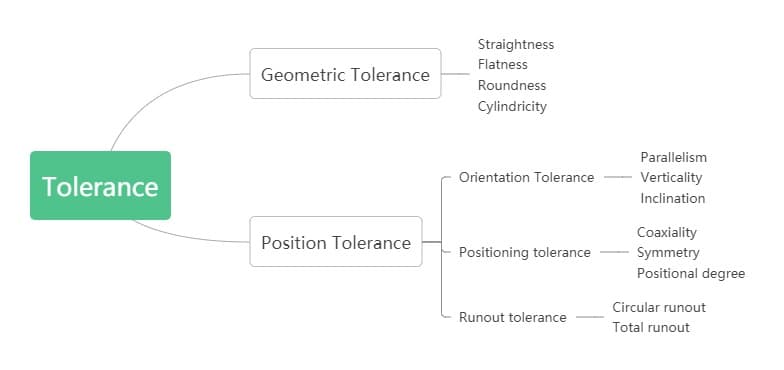
La tolerancia geométrica especificada por la norma nacional se divide en dos categorías: tolerancia geométrica y tolerancia de posición, con un total de 14 ítems.
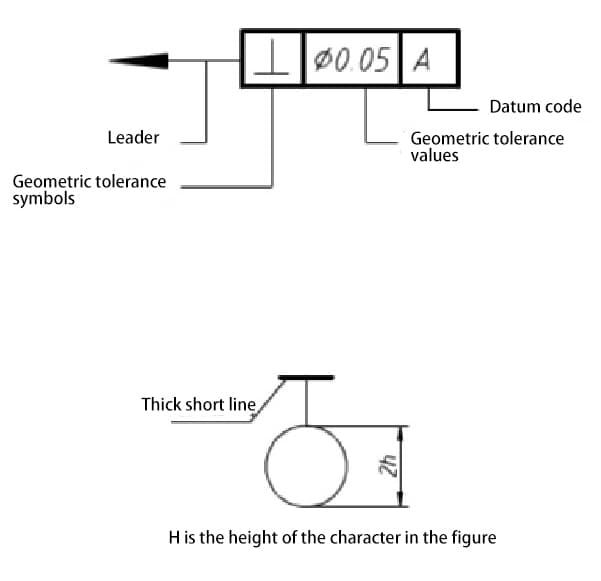
Sus nombres y símbolos se muestran en la siguiente tabla.
I. Definición de tolerancia de posicionamiento geométrico
Rectitud : todos los puntos están en línea recta, con tolerancia especificada por la región entre dos líneas paralelas.
Planitud : todos los puntos de una superficie se encuentran en un plano, con una tolerancia especificada por la región entre dos planos paralelos.
Redondez : todos los puntos de una superficie se encuentran en un círculo, con una tolerancia especificada por la región entre dos círculos concéntricos.
Cilindricidad : el eje de todos los puntos de una superficie giratoria es equidistante de un eje común. La tolerancia de cilindricidad define la zona de tolerancia formada por dos cilindros concéntricos, en la que esta superficie giratoria debe quedar dentro de esta zona.
Tolerancia del perfil : define el método de tolerancia para superficies, líneas, arcos o planos comunes irregulares. El perfil se puede aplicar a un elemento de una sola línea o a toda la superficie de una pieza. La tolerancia del perfil especifica el límite único a lo largo del perfil real.
Perpendicularidad : la superficie o el eje es perpendicular al plano o eje de referencia. La tolerancia perpendicular especifica uno de los siguientes: la región definida por dos planos perpendiculares al plano o eje de referencia, o la región definida por dos planos paralelos perpendiculares al eje de referencia.
Paralelismo : la superficie o eje y todos los puntos están equidistantes del plano o eje de referencia. La tolerancia de paralelismo especifica uno de los siguientes: la región definida por dos planos paralelos o líneas paralelas al plano o eje de referencia, o la región de tolerancia de cilindricidad donde el eje es paralelo al eje de referencia.
Coaxialidad : el eje de todos los elementos componibles que se cruzan de la superficie giratoria es el eje común del recurso de datos. La tolerancia de coaxialidad especifica la región de tolerancia de cilindricidad donde el eje es igual al eje de referencia.
Tolerancia de posición : la tolerancia de posición define el área donde el eje central o el plano central pueden desviarse de la posición real (teóricamente correcta).
La dimensión básica establece la posición real entre el recurso de datos y el recurso interrelacionado. El error de posición es la desviación posicional total permitida entre la característica y su posición correcta.
Para características cilíndricas como agujeros y diámetros exteriores, la tolerancia de posición es generalmente el diámetro de la región de tolerancia donde debe caer el eje de la característica. Para características no circulares (como ranuras y proyecciones cortas), la tolerancia de posición es el ancho total de la región de tolerancia donde debe caer el plano central de la característica.
Desplazamiento circular : proporciona control sobre elementos de superficie circulares. Cuando la pieza gira 360 grados, esta tolerancia se aplica de forma independiente en cualquier posición de medición del elemento circular y se aplica a la tolerancia de desviación circular construida alrededor del eje de referencia, controlando el cambio acumulado en circularidad y coaxialidad.
Cuando se aplica a una superficie construida verticalmente con el eje de referencia, controla elementos circulares de entidades de superficie plana.
Total Disaster : proporciona control compuesto sobre todos los elementos de la superficie. Cuando la pieza gira 360 grados, esta tolerancia se aplica simultáneamente a características circulares y alargadas. Cuando se aplica a una superficie construida alrededor del eje de referencia, la desviación total controla la variabilidad acumulada de redondez, cilindricidad, rectitud, coaxialidad, ángulo, conicidad y perfil. Cuando se aplica a una superficie construida verticalmente con el eje de referencia, controla la variabilidad acumulada de perpendicularidad y rectitud.
II. Terminología básica
Característica: se refiere a los puntos, líneas y superficies que forman la geometría de un componente.
Característica ideal: una característica con significado geométrico.
Recurso real: el recurso que realmente existe en el componente, normalmente representado por un recurso medido.
Característica de referencia: una característica utilizada para determinar la dirección o posición de la característica medida. Simplemente denominado referencia, sirve como base para determinar la relación geométrica entre características. Incluye puntos de referencia, líneas de referencia y superficies de referencia.
Característica medida: la característica que especifica la tolerancia de forma o posición.
Característica central: puntos, líneas o superficies que tienen una relación simétrica con la característica.
Rango de tolerancia: restringe la variación de las características de forma o posición reales. Es una región definida por un cierto valor de error máximo, determinado por el tamaño, la forma, la dirección y la posición”.
III. Clasificación de tolerancia
1. Justicia
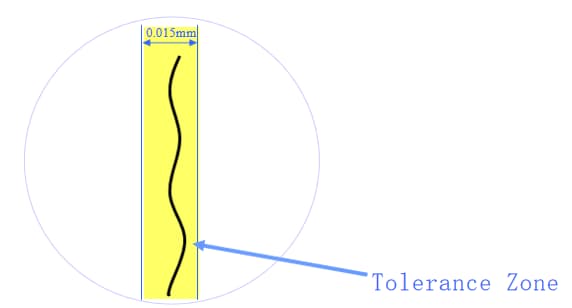
La banda de tolerancia es la región entre dos líneas/planos/cilindros paralelos, etc. a una distancia del valor de tolerancia t
Ejemplo 1
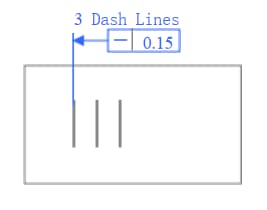
Cada línea grabada debe ubicarse entre dos líneas paralelas en la superficie con un valor de tolerancia de 0,015 mm.
Ejemplo 2
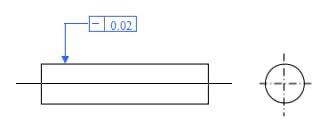
Cualquier línea de elemento en la superficie cilíndrica debe ubicarse dentro del plano axial y entre dos líneas paralelas a una distancia de valor de tolerancia de 0,02 mm.
Ejemplo de aplicación
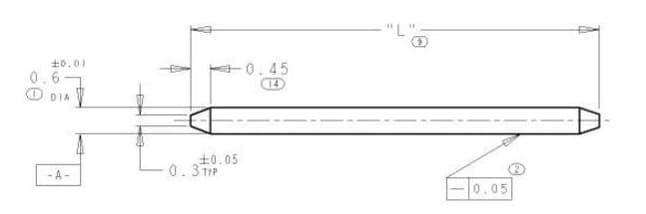
Ejemplo 3
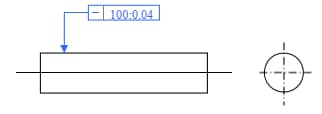
Cualquier línea de elemento en la superficie cilíndrica debe ubicarse dentro del plano axial y entre dos líneas paralelas con un valor de tolerancia de 0,04 mm dentro de cualquier 100 mm.
Ejemplo 4
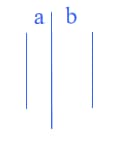
Discusión: ¿Cómo debemos entender si se dan diferentes tolerancias de rectitud en dos direcciones sobre una misma superficie?
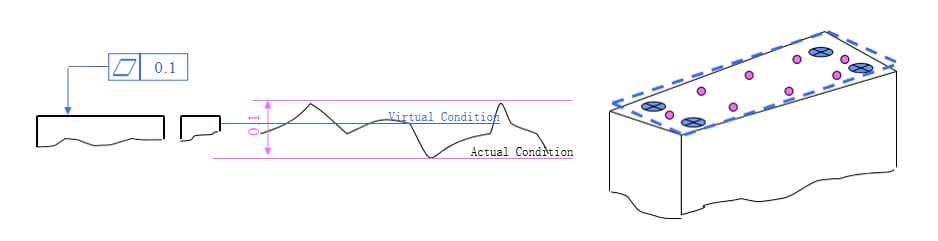
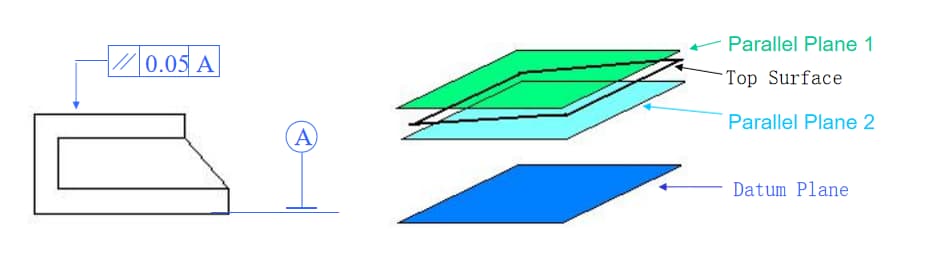
2. Planitud
La banda de tolerancia es la región entre dos planos paralelos a una distancia del valor de tolerancia t.
Representa la forma real de las características planas del componente manteniendo la condición plana ideal.
Ejemplo 1
La superficie superior debe ubicarse dentro de dos planos paralelos con un valor de tolerancia de 0,1 mm.
Ejemplo 2
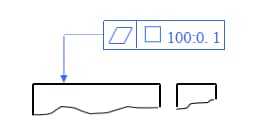
Cualquier tira de 100x100 de la superficie debe ubicarse dentro de dos planos paralelos con un valor de tolerancia de 0,1 mm.
3. Redondez
Representa la forma real de la característica circular en el componente y su centro manteniendo la misma distancia.
La banda de tolerancia es la región entre dos círculos concéntricos con una diferencia en el radio del valor de tolerancia t en la misma sección transversal.
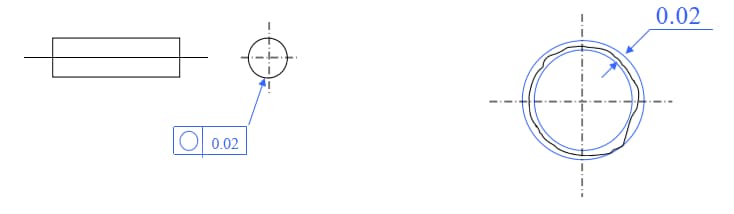
Ejemplo 1
En cualquier sección transversal perpendicular al eje, el círculo debe ubicarse entre dos círculos concéntricos con un radio de tolerancia de 0,02 mm.
Ejemplo 2
En cualquier sección transversal perpendicular al eje, el círculo debe ubicarse entre dos círculos concéntricos con un radio de tolerancia de 0,02 mm.
4. Cilindricidad
Representa la condición en la que todos los puntos en el contorno de la superficie cilíndrica del componente mantienen distancias iguales desde su eje.
La banda de tolerancia es la región entre dos superficies cilíndricas con una diferencia de radio del valor de tolerancia t en el mismo eje.
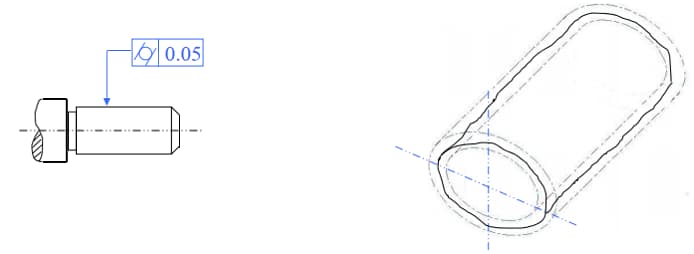
Ejemplo 1
La superficie cilíndrica debe ubicarse entre dos superficies cilíndricas con una diferencia en el radio de valor de tolerancia de 0,05 mm en el mismo eje.
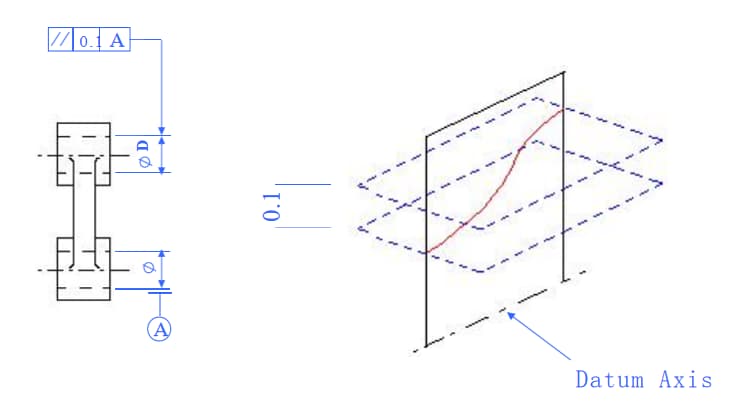
5. Paralelismo
Representa la condición en la que la característica real medida en el componente se mantiene a la misma distancia de la referencia.
Cuando se le da una dirección, la banda de tolerancia es la región entre dos planos paralelos a una distancia del valor de tolerancia t y paralelo al plano de referencia (o línea, eje); cuando se dan dos direcciones perpendiculares, es la región dentro de un prisma rectangular con dimensiones de valores de tolerancia t1×t2 y paralela al eje de referencia.
Ejemplo 1
La superficie superior debe ubicarse entre dos planos paralelos a una distancia de tolerancia de 0,05 mm y paralela al plano de referencia.
Ejemplo 2
El eje ΦD debe estar ubicado entre dos planos paralelos a una distancia con un valor de tolerancia de 0,1 mm y verticalmente paralelo al eje de referencia Φ.
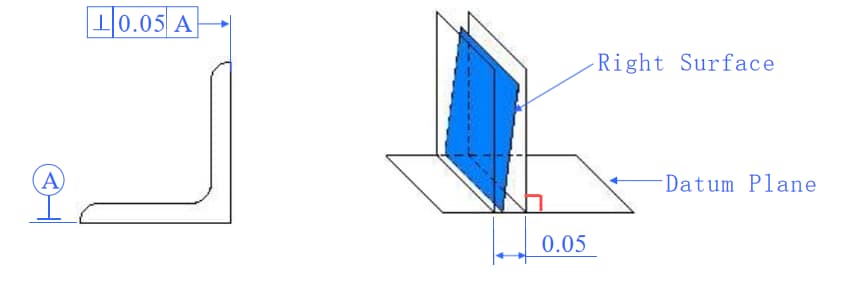
6. Verticalidad
La tolerancia representa la condición en la que la característica real de la pieza se mantiene en un ángulo correcto de 90 grados con respecto a la característica de referencia.
Cuando se le da una dirección, la zona de tolerancia es la región entre dos planos (o líneas) paralelos que son perpendiculares al plano de referencia (o línea, eje) y separados por una distancia igual al valor de tolerancia t.
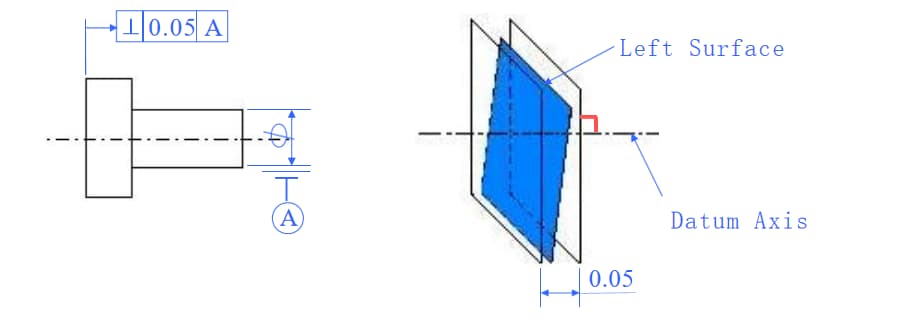
Cuando se dan dos direcciones mutuamente perpendiculares, la zona de tolerancia es la región dentro de un paralelepípedo con dimensiones t1 × t2 que es perpendicular al eje de referencia.
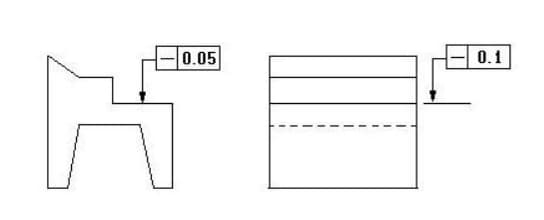
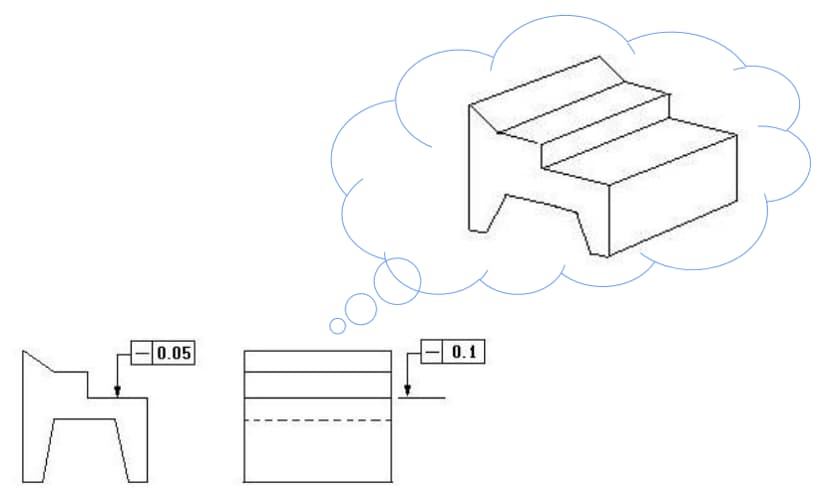
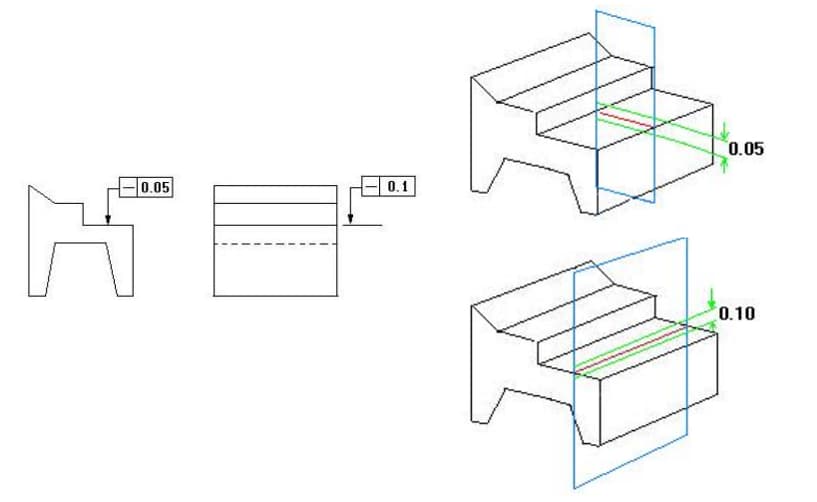
Ejemplo 1
La superficie derecha debe ubicarse entre dos planos paralelos perpendiculares al plano de referencia y tener una desviación de 0,05 mm.
Ejemplo 2
La superficie izquierda debe estar dentro de un rango de desviación de 0,05 mm y entre dos planos paralelos perpendiculares al eje de referencia.
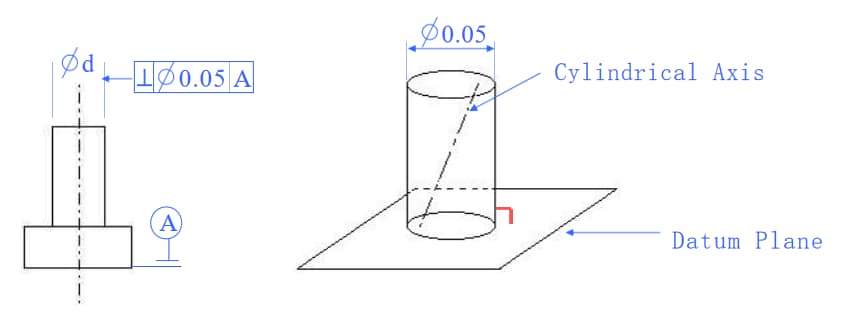
Ejemplo 3
El eje del cilindro d debe estar situado dentro de la superficie del cilindro perpendicular al plano de referencia con una tolerancia de diámetro de 0,05 mm.
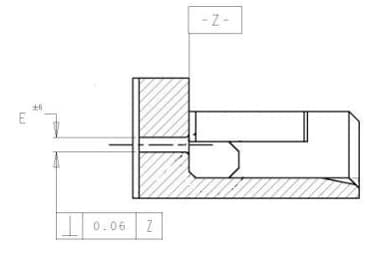
Ejemplo 4
El eje del orificio circular E debe estar entre dos planos paralelos perpendiculares al plano de referencia Z, con un valor de desviación de 0,06 mm.
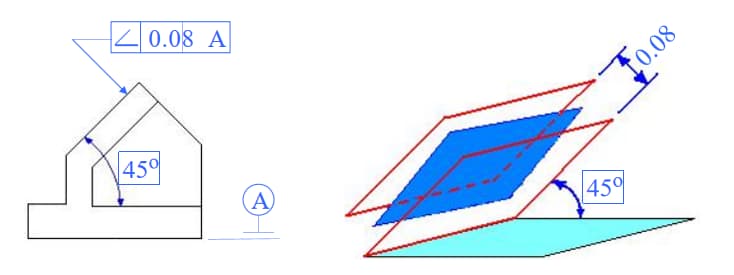
7. Grado de inclinación
Correcto estado de dos elementos de la pieza manteniendo un cierto ángulo entre sus direcciones relativas.
Dentro de una dirección especificada, la zona de tolerancia es el área entre dos planos (o líneas) paralelos que forman un ángulo teórico correcto con respecto al plano (o línea o eje) de referencia y un valor de tolerancia a una distancia t del mismo.
Ejemplo 1
La superficie inclinada debe ubicarse entre dos planos paralelos que formen un ángulo de 45 grados con respecto al plano de referencia y a una distancia de 0,08 mm del mismo dentro de la zona de tolerancia.
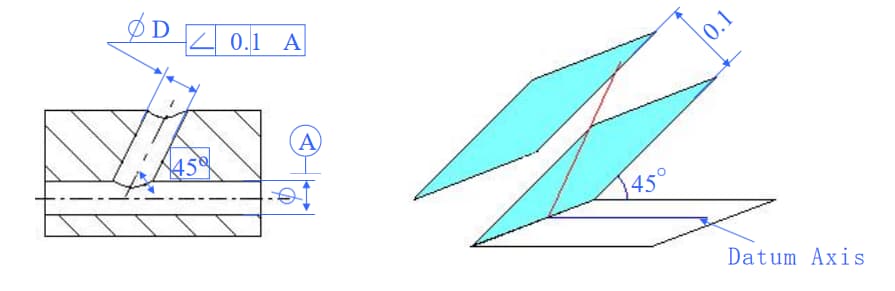
Ejemplo 2
El eje característico D debe ubicarse entre dos planos paralelos que formen un ángulo de 45 grados con respecto al eje de referencia y a una distancia de 0,1 mm del mismo dentro de la zona de tolerancia.
8. Concentricidad
La concentricidad es la condición en la que el eje que se mide en la pieza mantiene alineación con el eje de referencia a lo largo de la misma línea recta.
La zona de tolerancia es el área dentro de un cilindro que tiene un diámetro con el valor de tolerancia t y es coaxial con el eje de referencia.
Ejemplo 1
El eje característico D debe ubicarse dentro de un cilindro que tenga un diámetro de 0,1 mm y sea coaxial con el eje de referencia D dentro de la zona de tolerancia.

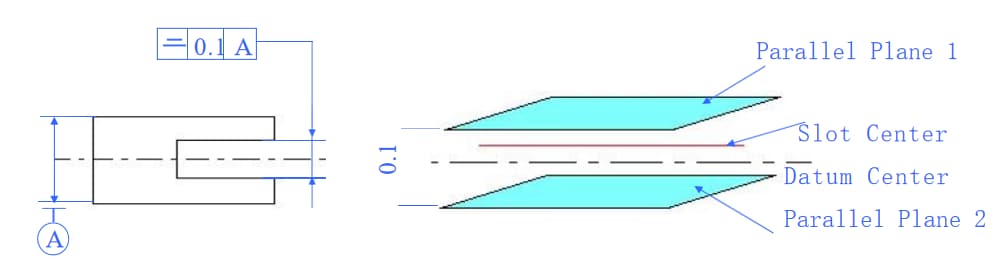
9. Simetría
La simetría es la condición en la que dos pares de características simétricas de la pieza están alineados en el mismo plano.
La zona de tolerancia es el área entre dos planos (o líneas) paralelos que están a una distancia del valor de tolerancia t del plano de referencia central (o línea central o eje) y dispuestos simétricamente con respecto a él.
Si se especifican dos direcciones mutuamente perpendiculares, la zona de tolerancia es la región dentro de un prisma de cuatro lados cuya sección transversal es igual a los valores de tolerancia t1 x t2.
Ejemplo 1
El plano central de la ranura debe ubicarse entre dos planos paralelos dispuestos simétricamente con respecto al plano central de referencia y a una distancia de 0,1 mm del mismo dentro de la zona de tolerancia.
Ejemplo:
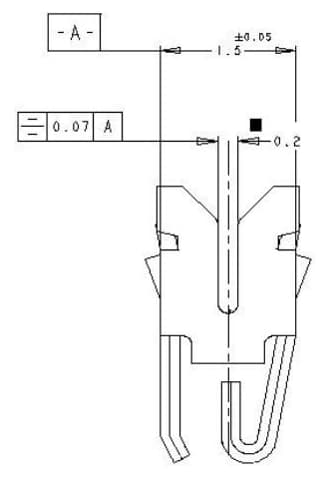
(1) Se debe enderezar el centro del terminal.
(2) La desviación máxima de un lado desde el centro de la ranura no puede exceder 0,035 mm.
¿Pregunta?
(1) ¿Cómo se calcula el desplazamiento T?
T=(ba)/2
(2) ¿Cuál es la tolerancia de simetría?
10. Tolerancia posicional.
La tolerancia posicional se refiere a la precisión de puntos, líneas, superficies y otros elementos de una pieza en relación con sus ubicaciones ideales.
Zona de tolerancia:
(1) Tolerancia posicional del punto: La zona de tolerancia es el área dentro de un círculo o esfera con un diámetro del valor de tolerancia t, centrado en la posición ideal del punto.
(2) Tolerancia posicional de línea: cuando se da una dirección, la zona de tolerancia es el área entre dos planos (o líneas) paralelos que están dispuestos simétricamente alrededor de la posición ideal de la línea y a una distancia del valor de tolerancia t. Si se dan dos direcciones perpendiculares, la zona de tolerancia es el área dentro de un prisma de cuatro lados con una sección transversal de tamaño t1 X t2 y la línea del eje del prisma coincide con la posición ideal de la línea.
(3) Tolerancia posicional de la superficie: la zona de tolerancia es el área entre dos planos paralelos que están dispuestos simétricamente alrededor de la posición ideal de la superficie y a una distancia del valor de tolerancia t.
Ejemplo 1
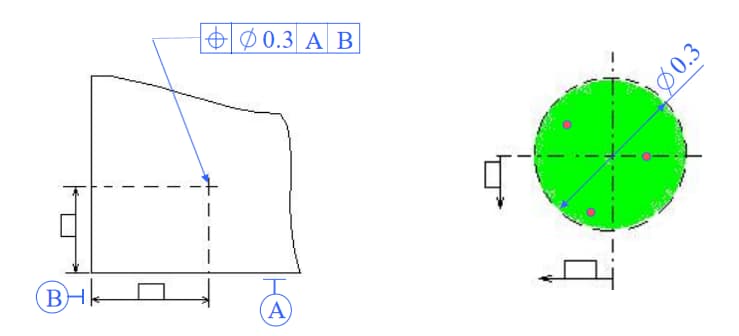
El punto debe estar ubicado dentro de un círculo con un diámetro de tolerancia de 0,3 mm, y el centro del círculo debe estar en la posición ideal de los puntos determinada por los datos relativos A y B.
Sistema de tres planos de referencia:
Tres planos de referencia mutuamente perpendiculares A, B y C constituyen un sistema de planos de referencia, comúnmente conocido como sistema de referencia de tres planos. Es el punto de partida para determinar las relaciones geométricas de varios elementos en partes.
En el sistema de tres planos de referencia, los planos de referencia están ordenados por sus funciones.
El más importante es el primer plano de referencia (A), seguido del segundo (B) y el tercer plano de referencia (C).
Ejemplo 2
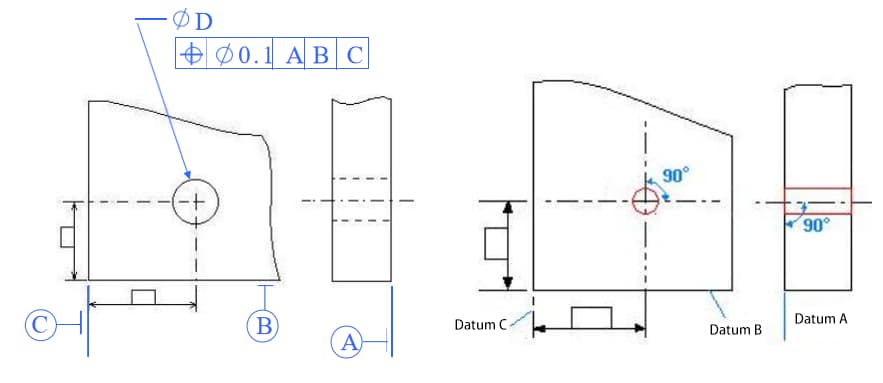
El eje del orificio debe ubicarse dentro de una superficie cilíndrica con un diámetro de tolerancia de 0,1 mm, y la línea del eje de la superficie del cilindro debe coincidir con la posición ideal de los puntos en los datos relativos A, B y C.
Ejemplo 3
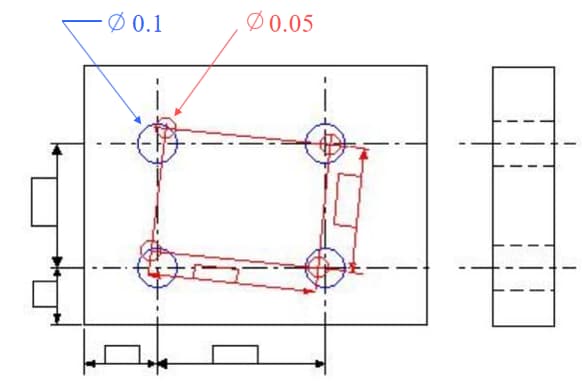
Tolerancia posicional compuesta.
Marco geométrico:
Es una gráfica que muestra la relación geométrica correcta entre un conjunto de líneas de ejes ideales o entre estas y el punto de referencia.
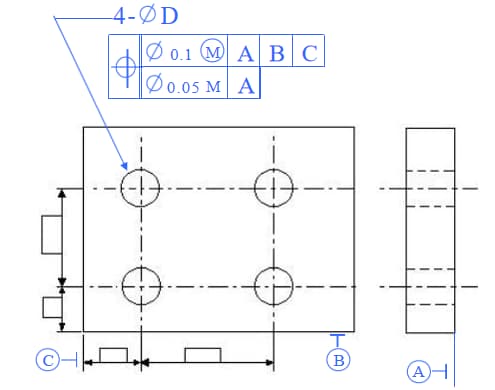
El eje de los cuatro orificios D debe ubicarse dentro de la sección superpuesta de dos zonas de tolerancia cilíndricas, una con un valor de tolerancia de diámetro de 0,1 mm y la otra con un valor de tolerancia de diámetro de 0,05 mm. El marco geométrico de las cuatro zonas de tolerancia posicional de 0,1 mm se determina con respecto a los datos A, B y C. El marco geométrico de las cuatro zonas de tolerancia posicional de 0,05 mm está orientado únicamente con respecto al punto de referencia A.
Los ejes de los cuatro orificios D deben ubicarse dentro de la sección superpuesta de dos zonas de tolerancia cilíndricas, una con un valor de tolerancia de diámetro de 0,1 mm y la otra con un valor de tolerancia de diámetro de 0,05 mm. El marco geométrico de las cuatro zonas de tolerancia posicional de 0,1 mm se determina con respecto a los datos A, B y C. El marco geométrico de las cuatro zonas de tolerancia posicional de 0,05 mm está orientado únicamente con respecto al punto de referencia A.
Consideración: compare los siguientes dos tipos de precisión posicional.

11. Desviación circular
Se refiere a la condición en la que la superficie giratoria de la pieza está limitada dentro de la superficie de medición y mantiene su posición especificada con respecto al eje de referencia.
(1) Excentricidad radial.
La zona de tolerancia es el área entre dos círculos concéntricos con sus centros en el eje de referencia, donde la diferencia de radio en cualquier plano de medición perpendicular al eje de referencia es el valor de tolerancia t.
(2) Excentricidad de la cara del extremo.
La zona de tolerancia es el área de la superficie cilíndrica a lo largo de la dirección generatriz con ancho t en el cilindro de medición en cualquier posición del diámetro coaxial con el eje de referencia.
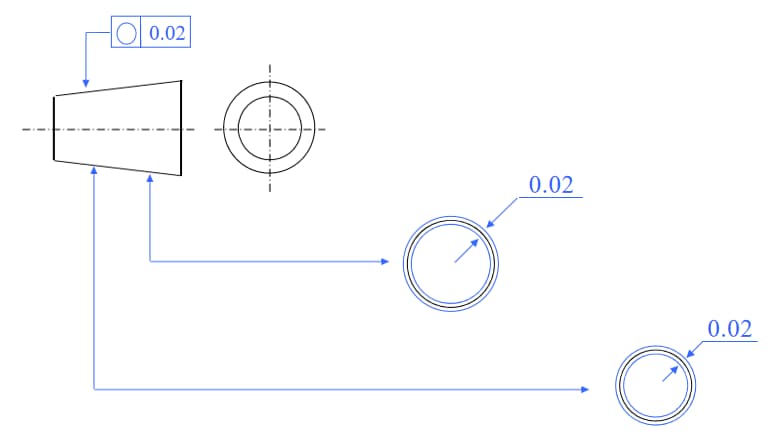
Ejemplo 1
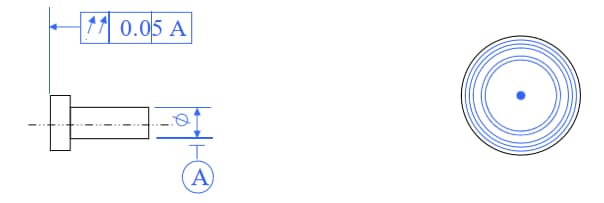
Excentricidad radial.
Cuando la superficie cilíndrica gira alrededor del eje de referencia sin ningún movimiento axial, la desviación radial en cualquier plano de medición no deberá exceder el valor de tolerancia de 0,05 mm.
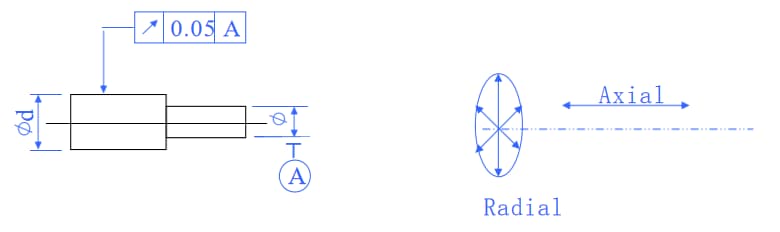
La zona de tolerancia es el área entre dos círculos concéntricos con sus centros en el eje de referencia, donde la diferencia de radio en cualquier plano de medición perpendicular al eje de referencia es el valor de tolerancia t.
Ejemplo 2
Desviación del final de la cara.
Cuando la pieza gira alrededor del eje de referencia sin ningún movimiento axial, la desviación axial en cualquier diámetro de medición en la cara del extremo izquierdo no debe exceder el valor de tolerancia de 0,05 mm.
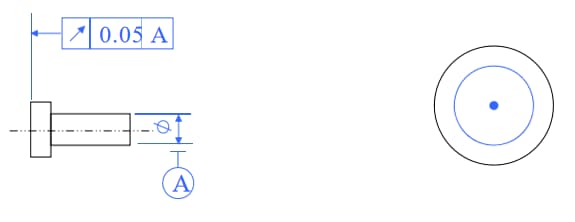
La zona de tolerancia es el área de la superficie cilíndrica a lo largo de la dirección generatriz con ancho t en el cilindro de medición en cualquier posición del diámetro coaxial con el eje de referencia.
12. Desaparición total.
Se refiere a la desviación uniforme a lo largo de toda la superficie medida de la pieza cuando gira continuamente alrededor del eje de referencia.
(1) Excentricidad radial total.
La zona de tolerancia es el área entre dos cilindros coaxiales con el eje de referencia y que tienen una diferencia de radio del valor de tolerancia t
(2) Excentricidad total de la cara del extremo.
La zona de tolerancia es el área entre dos planos paralelos perpendiculares al eje de referencia y a una distancia del valor de tolerancia t.
Ejemplo 1
Excentricidad radial total.
Cuando la superficie gira continuamente alrededor del eje de referencia sin ningún movimiento axial, mientras el indicador se mueve linealmente paralelo al eje de referencia, la desviación a lo largo de toda la superficie no debe exceder el valor de tolerancia de 0,02 mm.
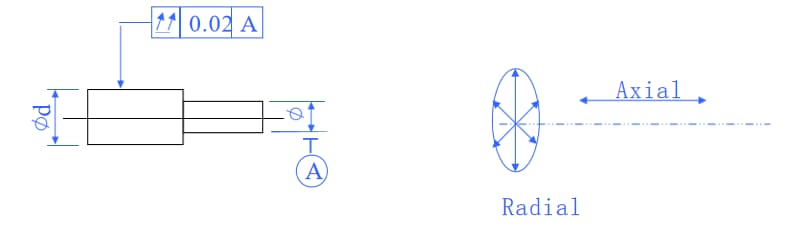
La zona de tolerancia es el área entre dos cilindros coaxiales con el eje de referencia y que tienen una diferencia de radio del valor de tolerancia t.
Ejemplo 2
Excentricidad total de la cara final.
Cuando la cara del extremo gira continuamente alrededor del eje de referencia sin ningún movimiento axial, mientras el indicador se mueve linealmente perpendicular al eje de referencia, la desviación a lo largo de toda la cara del extremo no debe exceder el valor de tolerancia de 0,05 mm.
La zona de tolerancia es el área entre dos planos paralelos perpendiculares al eje de referencia y a una distancia del valor de tolerancia t.