Casi la mitad del consumo energético mundial se atribuye a los motores eléctricos, por lo que mejorar su eficiencia se considera la medida más eficaz para abordar los problemas energéticos globales.
tipos de motores
Generalmente, los motores convierten la fuerza generada por el flujo de corriente en un campo magnético en movimiento de rotación, pero en términos generales, esto también incluye el movimiento lineal.
Según el tipo de fuente de alimentación que impulsa el motor, se pueden clasificar en motores de CC y CA.
Además, según el principio de rotación del motor, se pueden dividir a grandes rasgos en las siguientes categorías, excluidos los motores especiales.
1. Motores CC (corriente continua)
(1) motores con escobillas
Los motores con escobillas ampliamente utilizados generalmente se denominan motores de CC. Giran contactando secuencialmente electrodos llamados "escobillas" (en el lado del estator) y el "conmutador" (en el lado de la armadura) para cambiar la corriente.
(2) Motores CC sin escobillas
Los motores de CC sin escobillas no requieren escobillas ni conmutadores. Utilizan funciones de conmutación como transistores para conmutar la corriente y lograr un movimiento de rotación.
(3) Motores paso a paso
Este motor funciona en sincronización con la potencia del pulso y por eso también se le conoce como motor de pulso. Su característica es la capacidad de lograr fácilmente una operación de posicionamiento precisa.
2. Motores de CA (corriente alterna)
(1) Motores asíncronos
La corriente alterna genera un campo magnético giratorio en el estator, lo que hace que el rotor induzca corriente y gire bajo su interacción.
(2) Motores síncronos
La corriente alterna crea un campo magnético giratorio y el rotor con polos magnéticos gira debido a la atracción. La velocidad de rotación está sincronizada con la frecuencia eléctrica.
| Motor de paso | Motor de CC con escobillas | Motor CC sin escobillas |

|

|

|
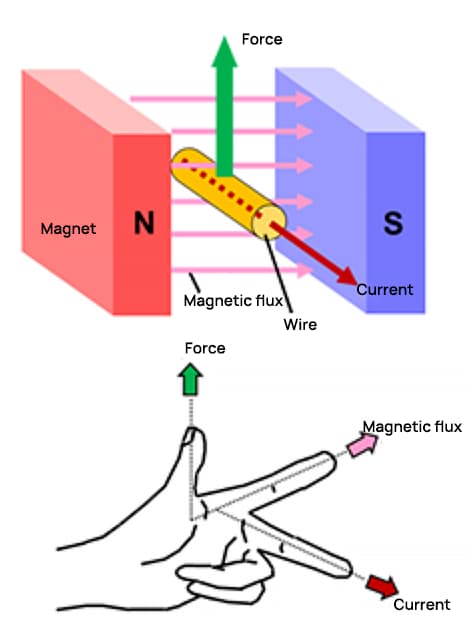
Corriente, campos magnéticos y fuerza.
En primer lugar, para facilitar explicaciones posteriores de los principios motores, revisemos las leyes/reglas básicas relacionadas con la corriente, los campos magnéticos y la fuerza.
Aunque pueda evocar una sensación de nostalgia, este conocimiento puede olvidarse fácilmente si no se utilizan componentes magnéticos con regularidad.
Ilustraremos esto usando imágenes y ecuaciones.
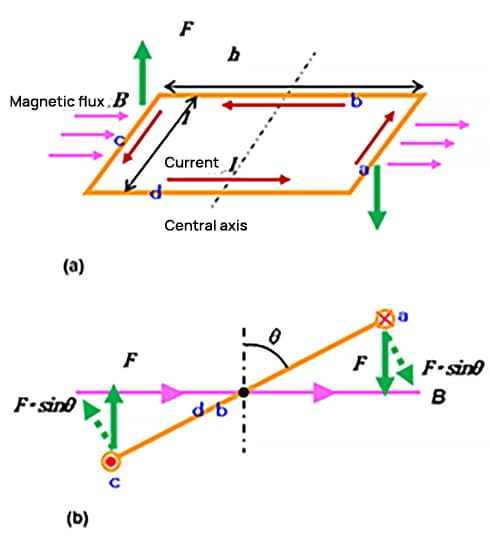
Cuando la estructura de alambre es rectangular, se debe considerar la fuerza que actúa sobre la cadena. La fuerza F ejercida sobre las partes a y c de la estructura es:

El par se genera alrededor del eje central. Por ejemplo, cuando se considera un estado donde el ángulo de rotación es justamente θ, la fuerza que actúa perpendicular a ab es senθ. En consecuencia, el par Ta en el inciso a está representado por la siguiente fórmula:

Considerando de la misma forma la parte C, el par se duplica, generándose un par calculado mediante la siguiente fórmula:

Dado que el área de un rectángulo es S = h*l, se puede obtener el siguiente resultado sustituyéndolo en la fórmula mencionada anteriormente:

Esta fórmula no sólo se aplica a los rectángulos sino también a otras formas comunes como los círculos. Este principio subyace al funcionamiento de los motores eléctricos.
¿Cómo gira un motor?
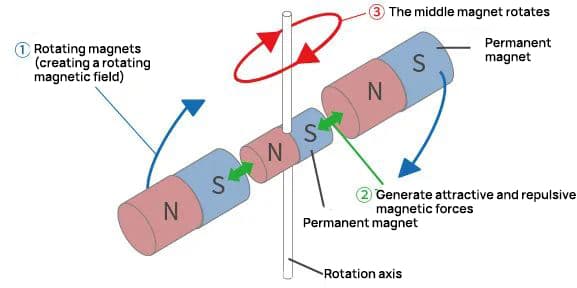
1) Los motores giran mediante imanes y fuerza magnética.
Alrededor de un imán permanente con eje giratorio:
① Gire el imán (para generar un campo magnético giratorio).
② Esto sigue el principio de que los polos opuestos (N y S) se atraen entre sí, mientras que los polos iguales se repelen.
③ El imán con el eje giratorio girará entonces.
Este es el principio básico de la rotación del motor.
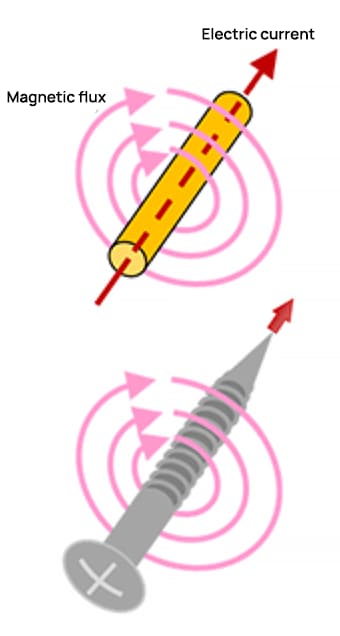
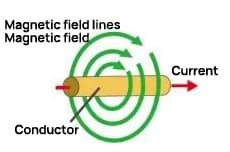
La corriente que fluye a través del conductor genera un campo magnético giratorio a su alrededor, lo que hace que el imán gire, lo que esencialmente representa el mismo estado de movimiento.
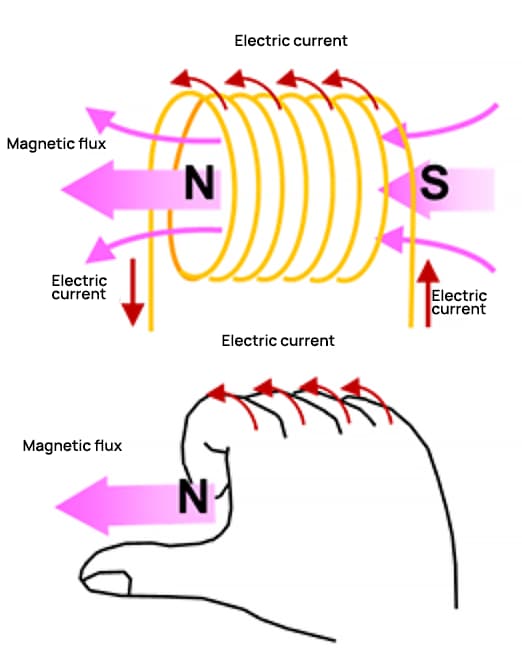
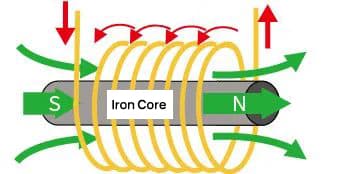
Además, cuando un conductor se enrolla en una bobina, las fuerzas magnéticas se sintetizan para formar un gran flujo magnético, creando un polo norte y un polo sur.
Además, al insertar un núcleo ferroso en el conductor bobinado, las líneas del campo magnético pueden pasar más fácilmente, generando así una fuerza magnética más fuerte.
2) Operación de motores rotativos
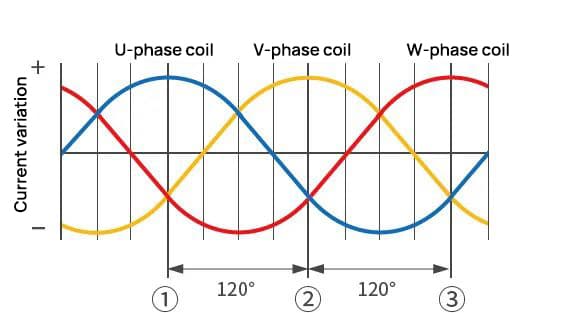
En este contexto, presentamos un enfoque práctico para motores rotativos, demostrando el uso de corriente alterna trifásica y bobinas para generar un campo magnético giratorio. (La corriente alterna trifásica se refiere a señales alternas escalonadas a intervalos de 120°).
El campo magnético sintetizado en dicho Estado ① corresponde a la Figura ① siguiente.
El campo magnético sintetizado en el estado ② mencionado anteriormente se alinea con la Figura ② que se muestra a continuación.
El campo magnético sintetizado asociado con el estado ③ antes mencionado se representa en la Figura ③ a continuación.
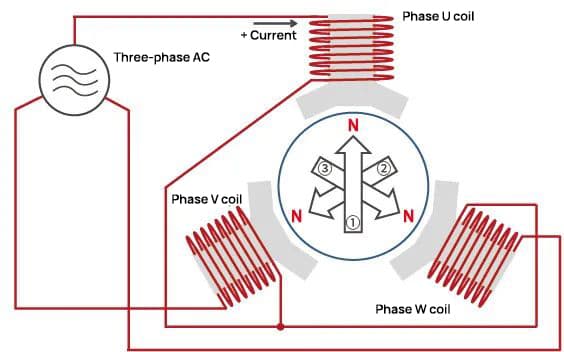
Como se indicó anteriormente, la bobina enrollada alrededor del núcleo de hierro se divide en tres fases: bobina de fase U, bobina de fase V y bobina de fase W, dispuestas a intervalos de 120°. La bobina con mayor voltaje genera un polo norte, mientras que la de menor voltaje genera un polo sur.
Cada fase varía según la onda sinusoidal, por lo tanto, la polaridad (polo norte o sur) y el campo magnético (fuerza magnética) generado por cada bobina cambiarán.
En este punto, si consideramos solo la bobina que genera el polo norte, la secuencia de cambios va de la bobina de fase U a la bobina de fase V, luego a la bobina de fase W, y finalmente de regreso a la bobina de fase U, así. produciendo una rotación.
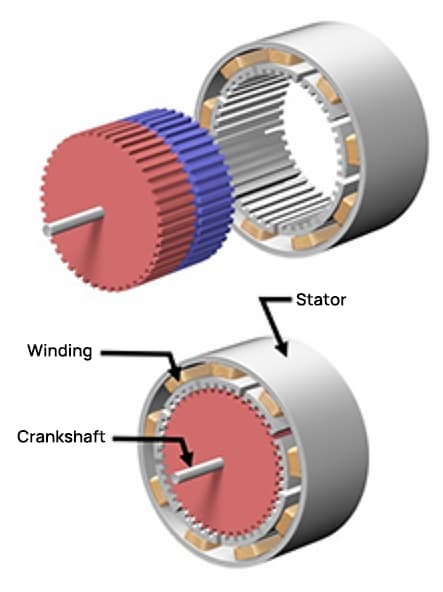
Estructura de motor pequeño
La siguiente figura proporciona una construcción general y una comparación de tres tipos de motores: motores paso a paso, motores de corriente continua (CC) con escobillas y motores de corriente continua (CC) sin escobillas.
Los componentes básicos de estos motores incluyen principalmente bobinas, imanes y rotores. Debido a sus diversos tipos, se clasifican en tipos fijos por bobina y fijos por imán.
| Motor de paso | Motor de CC con escobillas | Motor CC sin escobillas |

|

|

|
La siguiente es una descripción estructural relacionada con el diagrama de ejemplo. Por favor, comprenda que este documento presenta el marco dentro de un marco amplio, ya que puede haber otros marcos si se desglosan con más detalle.
Las bobinas del motor paso a paso aquí están fijadas en el exterior, con los imanes girando en el interior; Los imanes del motor de corriente continua con escobillas están fijos en el exterior y las bobinas giran en el interior.
El suministro de energía a las bobinas y el cambio de dirección de la corriente se realizan mediante escobillas y conmutadores; En los motores sin escobillas, las bobinas están fijas en el exterior y los imanes giran en el interior.
Debido a las variaciones en los tipos de motores, incluso con los mismos componentes básicos, sus estructuras pueden diferir. Los detalles específicos se explicarán en cada sección.
motor cepillado
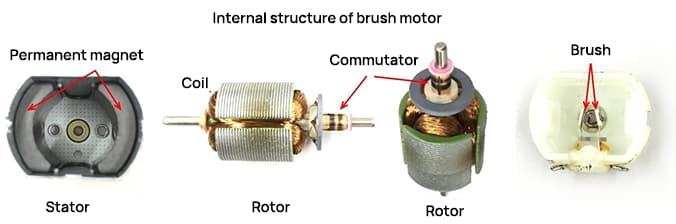
Estructura del motor cepillado
La siguiente imagen muestra el exterior de un motor de CC con escobillas que se usa comúnmente en los modelos, así como una vista detallada de un motor típico de dos polos (dos imanes) y tres ranuras (tres bobinas). Muchos pueden tener experiencia en desmontar motores y quitar imanes.
En un motor de CC con escobillas, los imanes permanentes están estacionarios mientras que las bobinas pueden girar alrededor del centro interior. El lado estacionario se conoce como "estator" y el lado giratorio se conoce como "rotor".
A continuación se muestra un diagrama esquemático que ilustra conceptos estructurales.
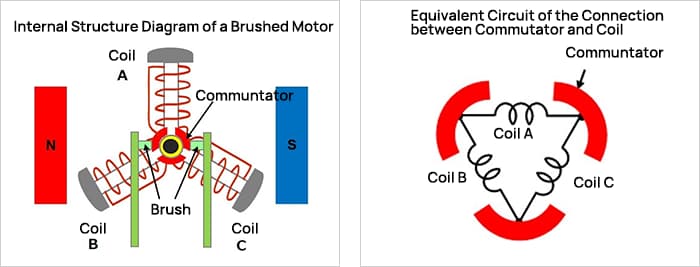
El eje central de rotación está rodeado por tres conmutadores: placas metálicas curvas que se utilizan para conmutar la corriente eléctrica. Para evitar el contacto entre sí, los interruptores están dispuestos a 120° de distancia (360° ÷ 3 unidades). Estos interruptores giran con el eje.
Cada conmutador está conectado a un extremo de una bobina y al otro, y juntos los tres conmutadores y las tres bobinas forman una red de circuito completa (anillo).
Se fijan dos escobillas a 0° y 180° para hacer contacto con los conmutadores. Se conecta una fuente de alimentación de CC externa a las escobillas y la corriente fluye a lo largo del camino desde la escobilla al conmutador, desde el conmutador a la bobina y desde la bobina de regreso a la escobilla.
Este es el principio de rotación de un motor con escobillas.
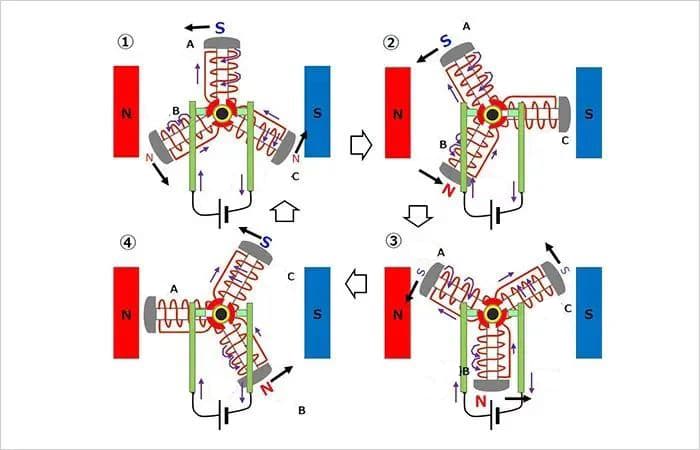
① Rotación en sentido antihorario desde el estado inicial
La bobina A está en la parte superior, con la fuente de alimentación conectada a los cepillos, designando el lado izquierdo como (+) y el derecho como (-). Una corriente alta fluye desde la escobilla izquierda a través del conmutador hasta la bobina A. Esto convierte la parte superior (exterior) de la bobina A en un polo sur (S).
Debido a que la mitad de la corriente de la bobina A fluye desde el cepillo izquierdo a las bobinas B y C en dirección opuesta a la bobina A, los lados exteriores de las bobinas B y C se convierten en polos norte débiles (N), indicados con letras más pequeñas en el diagrama.
Los campos magnéticos generados en estas bobinas, junto con la repulsión y atracción de los imanes, proporcionan una fuerza que hace girar las bobinas en sentido antihorario.
②Rotación adicional en sentido antihorario
Luego, suponiendo que la bobina A haya girado 30° en sentido antihorario, la escobilla derecha entra en contacto con los dos conmutadores.
La corriente en la bobina A continúa fluyendo desde la escobilla izquierda a través de la escobilla derecha, y el lado exterior de la bobina sigue siendo un polo sur. La misma corriente fluye a través de la bobina B, convirtiendo su lado exterior en un polo norte más fuerte. La bobina C está cortocircuitada por las escobillas en ambos extremos, por lo que no fluye corriente ni se genera ningún campo magnético.
Incluso en este estado, se aplica una fuerza de rotación en sentido antihorario. De ③ a 4, la bobina superior continúa moviéndose hacia la izquierda y la bobina inferior continúa moviéndose hacia la derecha, lo que resulta en una rotación continua en sentido antihorario.
Cada rotación de 30° de la bobina a los estados ③ y ④, cuando la bobina está por encima del eje horizontal central, su lado exterior se convierte en un polo sur; cuando está abajo, se convierte en polo norte y este movimiento se repite.
En otras palabras, la bobina superior experimenta repetidamente una fuerza hacia la izquierda y la bobina inferior una fuerza hacia la derecha (ambas en sentido antihorario). Esto mantiene el rotor girando en sentido antihorario.
Si la fuente de alimentación está conectada al cepillo izquierdo opuesto (-) y al cepillo derecho (+), se genera un campo magnético inverso en la bobina, invirtiendo así la dirección de la fuerza aplicada a la bobina, haciendo que gire en el sentido de las agujas del reloj.
Además, cuando se corta la fuente de alimentación, el rotor del motor con escobillas deja de girar debido a la ausencia del campo magnético que impulsa su rotación.
Motor trifásico sin escobillas de onda completa
Aspecto y estructura del motor trifásico sin escobillas de onda completa.
La siguiente imagen muestra un ejemplo de la apariencia y estructura del motor sin escobillas.
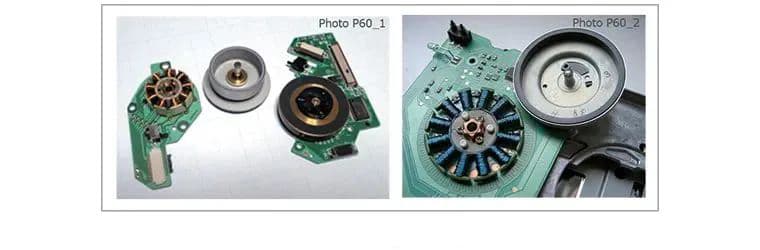
El lado izquierdo muestra un ejemplo del motor del eje principal utilizado para hacer girar el disco en el dispositivo de reproducción de discos, que contiene un total de nueve bobinas, tres fases multiplicadas por tres.
A la derecha hay un ejemplo de un motor de husillo principal de un dispositivo FDD, con doce bobinas (tres fases por cuatro). Las bobinas están montadas sobre una placa de circuito y enrolladas sobre un núcleo de hierro.
En el lado derecho de la bobina, el componente en forma de disco es un rotor de imán permanente. El perímetro es un imán permanente, el eje del rotor se inserta en el centro de la bobina y cubre parte de la bobina, con el imán permanente rodeando la periferia de la bobina.
Diagrama de estructura interna y circuito equivalente de un motor sin escobillas trifásico de onda completa.
A continuación se muestra el diagrama simplificado de la estructura interna y el diagrama de circuito equivalente de las conexiones de la bobina para un motor trifásico sin escobillas de onda completa.
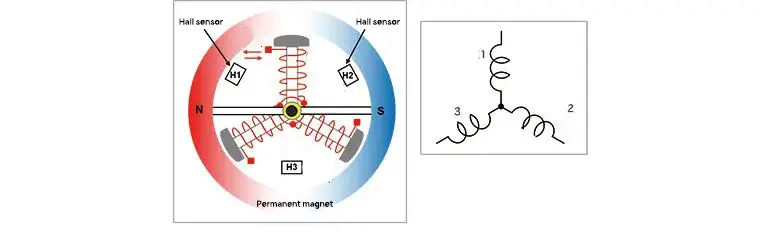
Este esquema representa una estructura simple de un motor de 2 polos (2 imanes) y 3 ranuras (3 bobinas). Se asemeja a la estructura de un motor con escobillas con el mismo número de polos y ranuras, excepto que el lado de la bobina está estacionario y los imanes giran. Naturalmente, este diseño no incorpora cepillos.
En esta configuración, las bobinas están conectadas en forma de Y. Los componentes semiconductores suministran corriente a las bobinas, controlando la entrada y salida de corriente en función de la posición de los imanes giratorios.
En este ejemplo, se utiliza un elemento Hall para detectar la posición de los imanes. El elemento Hall se coloca entre las bobinas, donde detecta el voltaje generado por la intensidad del campo magnético y lo utiliza para obtener información de posición.
En la imagen anterior del motor de husillo FDD también se puede ver un elemento Hall (situado encima de las bobinas), que sirve para detectar la posición entre las bobinas.
El elemento Hall es un conocido sensor magnético. Puede convertir la magnitud de un campo magnético en voltaje, representando la dirección del campo con valores positivos o negativos. A continuación se muestra un diagrama que ilustra el efecto Hall.
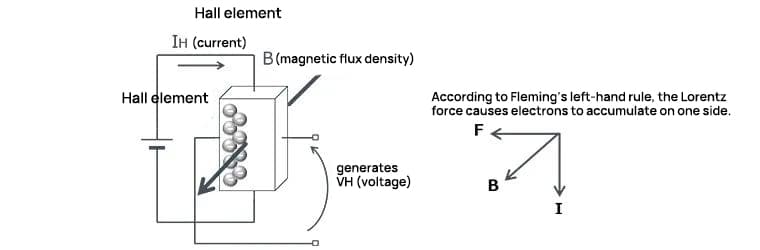
El elemento Hall utiliza el fenómeno de que “cuando la corriente IH fluye a través del semiconductor y el flujo magnético B pasa en ángulo recto con la corriente, se genera un voltaje VH en la dirección perpendicular a la corriente y al campo magnético”.
Este fenómeno, conocido como “Efecto Hall”, fue descubierto por el físico estadounidense Edwin Herbert Hall. El voltaje generado VH está representado por la siguiente fórmula.
V H =(K H /d)・I H・B
Donde KH es el coeficiente de Hall y d es el espesor de la superficie de penetración del flujo.
Como sugiere la fórmula, cuanto mayor es la corriente, mayor es el voltaje. Esta característica se utiliza a menudo para detectar la posición del rotor (imán).
Principio de rotación del motor trifásico sin escobillas de onda completa.
El principio de rotación del motor sin escobillas se explicará en los pasos ① a ⑥. Para que sea más fácil de entender, el imán permanente se ha simplificado de un círculo a un rectángulo.
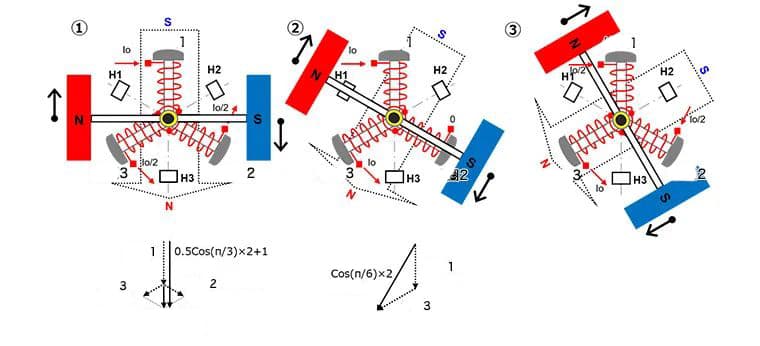
1) En un sistema de bobina trifásico, imagine la bobina 1 fijada en la posición de las 12 en punto de un reloj, la bobina 2 a las 4 en punto y la bobina 3 a las 8 en punto. Supongamos un imán permanente de 2 polos con el polo norte a la izquierda y el polo sur a la derecha, capaz de girar.
La corriente Io se introduce en la bobina 1, generando un campo magnético del polo sur en el exterior de la bobina. La mitad de esta corriente, Io/2, fluye fuera de las bobinas 2 y 3, creando un campo magnético del Polo Norte en el exterior.
Cuando los campos magnéticos de las bobinas 2 y 3 se someten a síntesis vectorial, se genera un campo magnético descendente del Polo Norte. Este campo tiene la mitad del tamaño del campo magnético producido cuando la corriente Io pasa a través de una bobina y, cuando se suma al campo de la bobina 1, se vuelve 1,5 veces mayor. Esto crea un campo magnético sintetizado en un ángulo de 90° con respecto al imán permanente, generando así un par máximo e incitando al imán permanente a girar en el sentido de las agujas del reloj.
A medida que la corriente en la bobina 2 disminuye y la de la bobina 3 aumenta según la posición de rotación, el campo magnético sintetizado también gira en el sentido de las agujas del reloj, continuando la rotación del imán permanente.
2) Con una rotación de 30°, la corriente Io ingresa a la bobina 1, poniendo la corriente en la bobina 2 a cero y provocando que la corriente Io fluya fuera de la bobina 3.
El exterior de la bobina 1 se convierte en el polo S y el exterior de la bobina 3 se convierte en el polo N. Durante la combinación de vectores, el campo magnético generado es √3 (aproximadamente 1,72) veces el de una sola bobina que transporta corriente Io. Esto también da como resultado un campo magnético compuesto en un ángulo de 90° con respecto al campo del imán permanente, que gira en el sentido de las agujas del reloj.
Cuando la corriente de entrada Io en la bobina 1 se reduce según la posición de rotación, la corriente de entrada en la bobina 2 comienza a aumentar desde cero y la corriente de salida en la bobina 3 aumenta a Io, el campo magnético compuesto también gira en el sentido de las agujas del reloj, y el imán permanente continúa girando.
Suponiendo que todas las corrientes de fase son sinusoidales, la corriente aquí es Io×sin(π⁄3)=Io×√3⁄2. Mediante la combinación de vectores del campo magnético, el tamaño total del campo magnético es 1,5 veces el campo producido por una sola bobina ((√3⁄2)2×2=1,5). Cuando todas las corrientes de fase son sinusoidales, independientemente de la posición del imán permanente, el tamaño del campo magnético compuesto vectorial es siempre 1,5 veces el de una sola bobina, y el campo magnético forma un ángulo de 90° con el campo magnético permanente. magnético.
3) Después de un giro adicional de 30°, la corriente Io/2 fluye hacia la bobina 1, la corriente Io/2 ingresa a la bobina 2 y la corriente Io sale de la bobina 3.
El exterior de la bobina 1 se convierte en el polo S, el exterior de la bobina 2 también se convierte en el polo S y el exterior de la bobina 3 se convierte en el polo N. Durante la combinación de vectores, el campo magnético generado es 1,5 veces el campo magnético producido cuando la corriente Io. pasa a través de una sola bobina (igual que en ①). Aquí también se forma un campo magnético compuesto en un ángulo de 90° con respecto al campo del imán permanente, que gira en el sentido de las agujas del reloj.
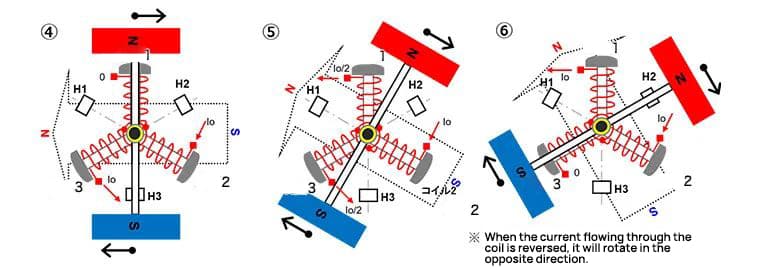
En los pasos 4 a 6, gire de la misma manera que en los pasos 1 a 3.
De esta manera, al alternar secuencialmente la corriente que fluye hacia la bobina según la posición del imán permanente, el imán permanente girará en una dirección fija. Asimismo, si se invierte la corriente y se invierte la dirección del campo magnético sintético, éste girará en sentido antihorario.
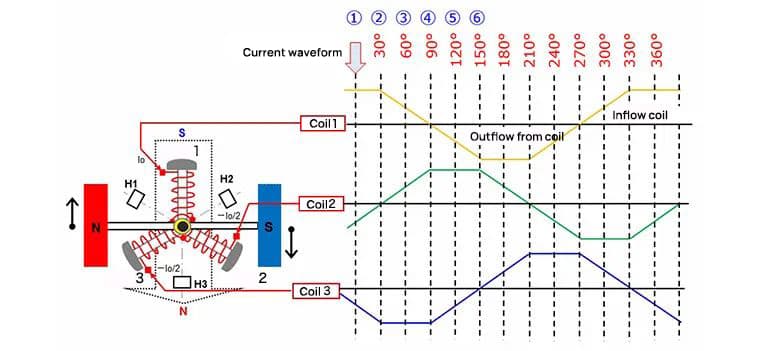
El siguiente diagrama muestra continuamente la corriente para cada bobina en cada uno de los pasos 1 a 6 mencionados anteriormente. De la introducción anterior, se debe entender la relación entre los cambios en la corriente y la rotación.
Motor de paso
El motor paso a paso es un tipo de motor que puede sincronizar con precisión señales de pulso para controlar los ángulos de rotación y la velocidad. También se le conoce como “motor de impulsos”.
El motor paso a paso, que no requiere un sensor de posición y puede realizar un posicionamiento preciso mediante control de bucle abierto, se usa ampliamente en equipos que requieren una localización precisa.
Estructura de un motor paso a paso (bipolar bifásico)
Las imágenes a continuación, de izquierda a derecha, muestran un ejemplo de la apariencia externa de un motor paso a paso, un diagrama simple de su estructura interna y un esquema conceptual de su diseño.
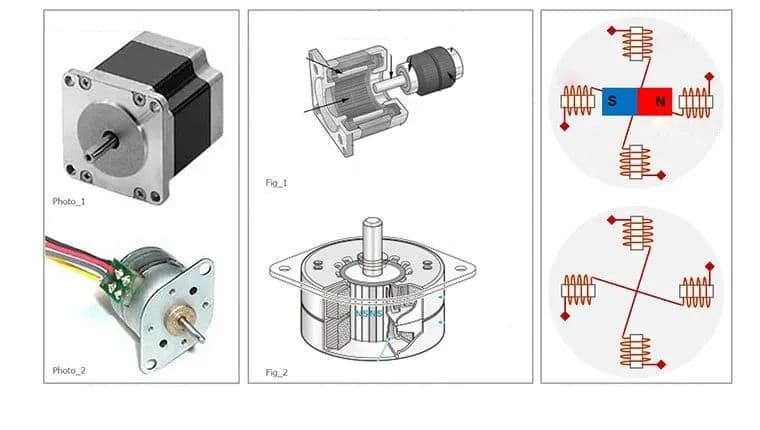
Los ejemplos externos proporcionados son motores paso a paso HB (híbridos) y PM (imanes permanentes). Los diagramas del medio también representan las estructuras de los tipos HB y PM.
Los motores paso a paso están estructurados con bobinas fijas y un imán giratorio. El diagrama conceptual de la derecha de la estructura interna del motor paso a paso ilustra un ejemplo de un motor PM que utiliza dos fases (dos juegos) de bobinas. En los ejemplos de estructura básica de motores paso a paso, las bobinas están ubicadas externamente y el imán permanente está ubicado internamente. Además de los bifásicos, también existen tipos con un mayor número de fases, como los trifásicos y los pentafásicos.
Algunos motores paso a paso tienen estructuras diferentes, pero para explicar sus principios de funcionamiento, este artículo proporciona la estructura básica de los motores paso a paso. A través de este artículo pretendemos comprender que los motores paso a paso adoptan principalmente una estructura con bobinas fijas y un imán permanente giratorio.
Principio de funcionamiento básico de los motores paso a paso (excitación monofásica)
El siguiente diagrama se utiliza para explicar el principio de funcionamiento básico de los motores paso a paso. Este es un ejemplo de excitación monofásica (un juego de bobinas) de las bobinas bipolares de dos fases mencionadas anteriormente. La premisa del diagrama es el cambio de estado de ① a ④. Las bobinas constan de la bobina 1 y la bobina 2. Además, la flecha de corriente representa la dirección del flujo de corriente.
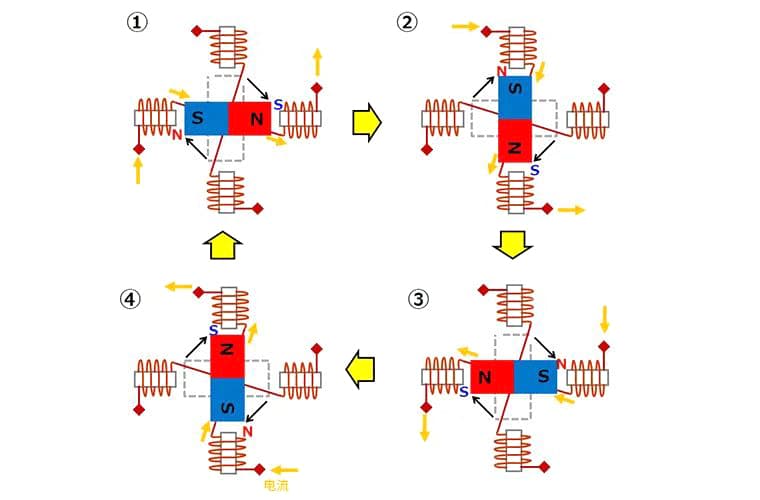
①Dirija la corriente para que entre por el lado izquierdo de la bobina 1 y salga por el lado derecho. Evite cualquier flujo de corriente a través de la bobina 2. Como resultado, el lado interior de la bobina izquierda 1 se convierte en N (norte), mientras que el lado interior de la bobina derecha 1 se convierte en S (sur). En consecuencia, el imán permanente del medio es atraído por el campo magnético de la bobina 1, adoptando un estado con S a la izquierda y N a la derecha, y se detiene.
②Luego, interrumpa la corriente en la bobina 1, dirigiéndola a entrar por la parte superior de la bobina 2 y salir por la parte inferior. El lado interior de la bobina superior 2 se convierte entonces en N, y el lado interior de la bobina inferior 2 se convierte en S. El imán permanente es atraído por este campo magnético, gira 90 grados en el sentido de las agujas del reloj y se detiene.
③Después de eso, interrumpa la corriente en la bobina 2, dirigiéndola para que entre por el lado derecho de la bobina 1 y salga por el lado izquierdo. El lado interior de la bobina izquierda 1 se convierte en S y el lado interior de la bobina derecha 1 se convierte en N. El imán permanente es nuevamente atraído por este campo, gira otros 90 grados en el sentido de las agujas del reloj y se detiene.
④Finalmente, interrumpa la corriente en la bobina 1, dirigiéndola para que entre por la parte inferior de la bobina 2 y salga por la parte superior. El lado interior de la bobina superior 2 se convierte en S, mientras que el lado interior de la bobina inferior 2 se convierte en N. Una vez más, el imán permanente es atraído por este campo magnético, gira 90 grados en el sentido de las agujas del reloj y se detiene.
Al cambiar el flujo de corriente a través de las bobinas en la secuencia anterior (① a ④) a través de un circuito electrónico, el motor paso a paso puede girar. En este ejemplo, cada acción del interruptor hace girar el motor paso a paso 90 grados.
Además, mantener un flujo de corriente continuo a través de una bobina específica permite que el motor permanezca detenido mientras mantiene el par. Como nota al margen, invertir el orden del flujo de corriente a través de las bobinas puede hacer que el motor paso a paso gire en la dirección opuesta.







