Technology and Development

Spy Rover robot implemented using IP camera tha...
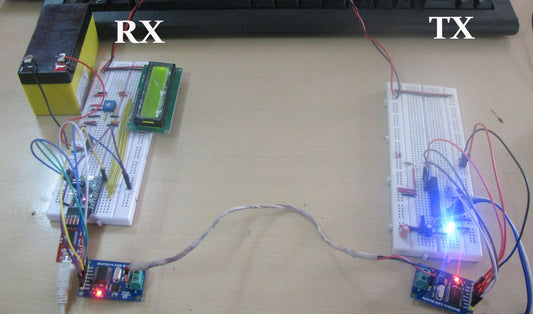
In this tutorial, a Bluetooth controlled spy rover is designed. It is a surveillance robot that will be used to monitor and monitor areas that are difficult for humans to...
Spy Rover robot implemented using IP camera tha...
In this tutorial, a Bluetooth controlled spy rover is designed. It is a surveillance robot that will be used to monitor and monitor areas that are difficult for humans to...
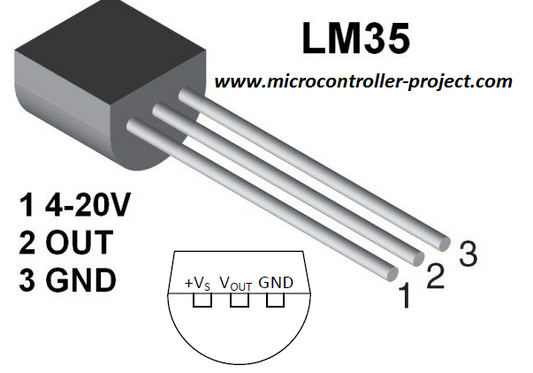
LM35 Temperature Sensor Pinout, Interface Guide...
LM35 is a temperature sensor that emits an analog signal proportional to the instantaneous temperature. The output voltage can be easily interpreted to obtain a temperature reading in Cels...
LM35 Temperature Sensor Pinout, Interface Guide...
LM35 is a temperature sensor that emits an analog signal proportional to the instantaneous temperature. The output voltage can be easily interpreted to obtain a temperature reading in Cels...
STARTING WITH CAN INTERFACE WITH ARDUINO
This article aims to make readers explore how to interface CAN Bus with Arduino, which is used in communicating sensors, actuators, and controllers in a car. This one...
STARTING WITH CAN INTERFACE WITH ARDUINO
This article aims to make readers explore how to interface CAN Bus with Arduino, which is used in communicating sensors, actuators, and controllers in a car. This one...
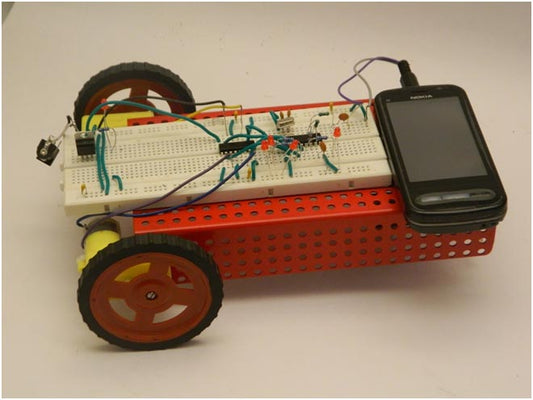
Cell Phone Controlled Robot Without Microcontro...
Mobile Operated Robot is a Robot whose movement can be controlled by pressing the mobile phone number. The robot can move forward, backward, right or left depending on the...
Cell Phone Controlled Robot Without Microcontro...
Mobile Operated Robot is a Robot whose movement can be controlled by pressing the mobile phone number. The robot can move forward, backward, right or left depending on the...

How to use the ADXL345 accelerometer sensor
Inertial sensors are used to detect linear and rotational motion of an object. There are two types of inertial sensors – accelerometers that detect linear acceleration and gyroscopes that...
How to use the ADXL345 accelerometer sensor
Inertial sensors are used to detect linear and rotational motion of an object. There are two types of inertial sensors – accelerometers that detect linear acceleration and gyroscopes that...
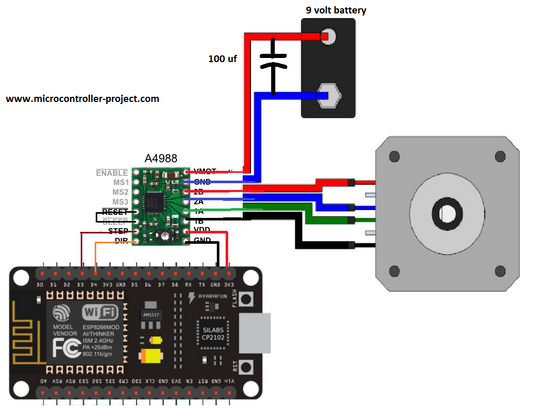
Nodemcu esp8266 NEMA 17 stepper motor controlle...
This tutorial is about how to control stepper motor over WiFi via desktop or mobile browser using nodemcu esp8266 WiFi module. Nodemcu will work as a server and serve a...
Nodemcu esp8266 NEMA 17 stepper motor controlle...
This tutorial is about how to control stepper motor over WiFi via desktop or mobile browser using nodemcu esp8266 WiFi module. Nodemcu will work as a server and serve a...