
As we previously discussed about the incredible world of robotics , it is believed that fully autonomous robots were only developed in the second half of the 20th century. In all these years, many new inventions have occurred, from drones to nanorobots; without forgetting animal and humanoid robots that look like living beings.
However, that's not it! There is much more than has been explored so far. The future of robotics would be redefined by soft robotics, a concept still unknown to the masses. Let's take a look at the tidbits of the concept and understand how it became the new rage in the world of robotics.

A soft robotic hand (image courtesy: Tech Gen Mag)
What is Soft Robotics?
Soft Robotics is a branch of Robotics that deals with the design, development and construction of soft and flexible robots with movements similar to those of biological organisms. These use soft, deformable materials to be constructed, such as silicone, plastic, rubber, fabric or mechanical parts like springs. Due to their high flexibility, flexible robots can interact with their environment quite easily and can undergo large deformations depending on structural compliance.
Living things are naturally programmed to move and interact with their environment. This is because your body is built with actuators, sensors, tweezers, as well as hard and soft structures. The same principle applies to soft robots; To make them interact easily with the environment and provide biological maneuverability, these robots are built with different materials.
Soft Robotics is reshaping robotics
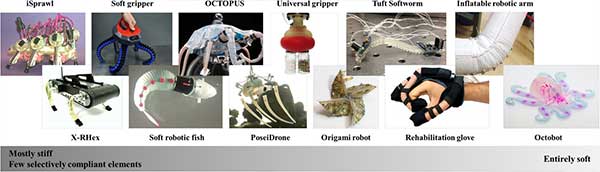
Range of robots, from hard to soft (image courtesy: Science Robotics)
Significant changes are happening regarding improved materials, literally reshaping the field of robotics. The concept of soft robotics is giving way to reduced costs, enhanced capabilities as well as safer interactions with humans. The concept completely changed the way conventional robots in automotive, medical and industrial applications were built and operated.
Most of these robots are inspired by flexible creatures like octopuses and caterpillars. They are constructed with materials that allow them to shape their shape and movement according to their surroundings. Appearing to be a structure composed only of bones and joints, soft robots are capable of stretching, twisting, rotating or crushing in unimaginable ways; much like a living organism.
Soft Robotics Technology
Much like modern devices that are developed in more portable forms compared to previous generation models, soft robots have abandoned the rigid skeletons of previous heavy machine robots. These modern robots can transform their shape and size, wrap around objects, interact with humans more safely, and can even hold objects as fragile as a tomato.
According to the SRI Robotics Program, there are 3 main technologies responsible for this evolution of robotics. These are:
Electroactive Polymer:

Electroactive polymer, also known as artificial muscles (image courtesy: sri)
Electroactive polymer or artificial muscles expand when voltage is applied and contract when voltage is removed, thus converting electrical energy into mechanical movement. This helps the robot move with the same dexterity as humans. The material also makes it easier for the robot to change the surface texture and develop films that can sense pressure and contact.
These polymers can even be incorporated into clothing and fabrics to measure movements and forces in the form of wearables. In fact, many organizations are working on polymeric materials based on SRI licensing for a wide range of applications where soft, flexible and electrically active actuation and sensing are required.
Soft tweezers

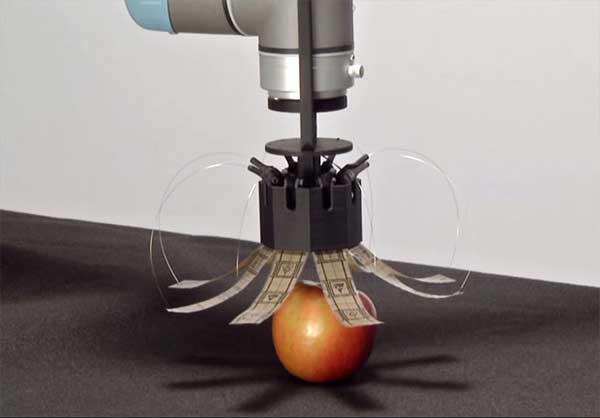
Soft claws (image courtesy: nature)
Unlike hard grippers, their soft counterparts need minimal detection and control to grasp objects. For example, in locking tongs, a flexible bag is filled with a powder-like substance so that it can mold around an object of any shape. Then, a vacuum process takes place that makes the gripper rigid to grasp any object by friction, without the need for any complex processing.
Electroadhesion technology
Electroadhesion technology (image courtesy: lenergreek)
In this technology, electrostatic forces are used to pick up objects that are too delicate for frictional forces to work. Just as rubbing a balloon against your hair creates electrostatic attraction, this technology can be used to grasp any object. The SRI team used it in wall-jumping robots that work even on wet or rough surfaces.
Electrolaminated technology

MIT's FitSocket technology for prosthetic limbs (image courtesy: risosquid)
It can make a material change from soft to hard, on demand and that too without adding significant volume, mass or power to the materials. The technology uses lightweight, low-cost flexible polymers that help with a wide range of stiffness and elongation with quick reaction.
The electrolaminates were equipped with MIT's FitSocket technology for prosthetic limbs. Straps made of electrolaminated materials connect the human body to prosthetic limbs. When the limbs are in motion, the straps are stiff, while they are soft and flexible when the limbs are at rest.
Some famous Soft Robotics projects
Octobot

Octobot: the world's first fully autonomous soft robot (image courtesy: BBC)
A team of researchers at Harvard University has developed the world's first fully soft, autonomous robot, called Octobot. As the name suggests, the robot is inspired by the structure of an octopus, which is strong even without an internal skeleton. It was built using a combination of embedded 3D printing, molding and soft lithography.
In the absence of rigid components, the Octobot uses a pneumatic mechanism and is powered by gas under pressure. A chemical reaction inside the bot turns the liquid fuel into gas that flows into its arms, inflating them like a balloon. It also contains a logic circuit that autonomously directs the fuel, thereby controlling the reaction.
Caterpillar microrobot

Caterpillar microrobot (image courtesy: Popular Science)
Researchers at the University of Warsaw have developed a bio-inspired microrobot that not only looks exactly like a caterpillar, but also mimics its movements and features on a full scale. The 15mm soft robot can travel on flat surfaces, climb slopes, pass through narrow crevices and even carry cargo.
Its body is made of a light-sensitive elastomer band with standardized molecular alignment. It controls displacement deformation and can push objects as heavy as ten times its own mass. The robot has immense potential for future applications, especially in challenging environments.
Exo-Poly Glove

Exo-Glove Poly (image courtesy: youtube)
Associate Professor Kyu-Jin Cho of Seoul National University along with his team developed a device that sits somewhere between a wearable device and a prosthetic limb. It is a simple device to increase grip that attaches to the hands with the help of magnets and buckles and helps in the movement of the hands and fingers. The glove is waterproof, easy to use and works with simple actuators and wires. These wires run from two figures up the arm and finally reach the actuation motor, just as the tendons in our hands pass through the wrist. Once the button is pressed, it closes the handle. It is a blessing for those with paralyzed hands to be independent and take back control.
SNUMAX

SNUMAX: Multifunctional Soft Robot (image courtesy: youtube)
SNUMAX is a multifunctional soft robot jointly developed by three entities – Biorobotics Laboratory, School of Mechanical and Aerospace Engineering and Seoul National University. The robot won first prize in the first RoboSoft Grand Challenge. It has transformable origami wheels that can change size and shape depending on the situation. The wheels shrink when moving through a narrow passage and enlarge when climbing stairs or going over rough surfaces.
It also contains a soft manipulator in the form of a continuous polymer-based body, allowing for highly flexible and safe movements. Additionally, there is an adaptive gripper that works through an adaptive positioning mechanism with a specially designed friction pad, allowing easy gripping of arbitrary objects.
Conclusion
These are just some of the advances that have been made so far in the field of soft robotics. As the concept is relatively new compared to conventional robotics, we have not yet witnessed the full potential of soft robots. It is believed that in the coming years soft robotics will no longer be restricted as a sub-branch; rather, it would define robotics itself.
However, this does not necessarily degrade the current position of heavy robotics. Many argue that rigid and flexible robots could coexist depending on the applications. For example, factories still need tough, robust robots to work with heavy machinery, but when it comes to rescue operations, we need something softer and more flexible to interact with humans.
The pace at which things are proceeding is not far off when we would have robots sensible enough to retract or change their shape in advance when they are about to hit a human before causing any possible damage.
You can read our Blog and Article section for more topics on electronic engineering, industry and technology.
(tagsToTranslate)pic







