The PS2 keyboard uses a simple synchronous serial protocol using just two wires for communication. Due to their simplicity, PS2 keyboards are also widely used with simple microcontroller-based boards. The PS2 keyboard always acts as a slave device that can send the equivalent ASCII value of the key that was pressed to its master device, which can be a PC or a microcontroller.
This project explains how to interface a keyboard and memory card with the Arduino board and therefore type and store some text using the keyboard on the memory card. Files on an SD memory card are stored using FAT32 or FAT16, and you must use the FAT file system code or library to access files on an SD card. The Arduino easy prototyping platform provides a library to access SD memory cards. Arduino also supports several libraries for interfacing PS2 devices such as mouse and keyboard.
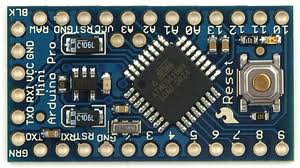
The AVR microcontroller boards that are provided with all the basic circuitry for the operation of the microcontroller that has been upgraded with the Arduino bootloader are called Arduino boards. Arduino can communicate with other devices using digital I/O, serial port, I2C port, SPI port, etc. The Arduino IDE is so simple to use that anyone who has basic knowledge of C programming can quickly start using it. The project on how to get started with Arduino explains the steps needed to start using an Arduino board. The Arduino board used in this project is the Arduino Pro-Mini board and the IDE version of Arduino is 1.0.3 for Windows. The Arduino pro-mini board has an ATMEGA328 microcontroller inside it that has an internal EEPROM memory of 1Kb.
The image of the Arduino Pro-Mini board and Arduino IDE are shown below;

Fig. 2: Typical Arduino Pro-Mini board

Fig. 3: Arduino IDE software window
Since the Arduino pro-mini board does not have circuitry to interface with the PC's serial port or USB port, an external USB to TTL converter board is required to connect it to the PC. This hardware helps in programming the Arduino board and also helps in serial communication with the USB port of the PC.

4: External USB to TTL converter board for Arduino programming and serial communication
It is assumed that the reader has gone through the project how to get started with Arduino and tried all the things discussed there. The memory card used in this specific project is a 2 GB SD card from Transcend, but the code should work with SD cards from all vendors. The SD card operates on 3.3V logic and therefore, to interface with a microcontroller that operates on 5V logic, a Logic Level Converter must be used. Since the memory card is interfaced using the SPI bus, four-channel logic level converter modules that are commonly available on the market can be used. The image of the Logic Level Converter module used in this project is shown in the following image;

Fig. 5: Logic Level Converter Module Circuit
The SD memory card and the low voltage side of the Logic Level Converter must be provided with a 3.3V power supply and any 3.3V regulator IC can be used for this. It is suggested that a bi-color LED be connected to the positive 3.3V and MISO and MOSI lines of the SD card. The image of the memory card and the necessary circuits that were built for this specific project are shown in the following image. In the image you can see a potentiometer that actually forms the circuit with a variable regulator SMD IC LM117 underneath it. It is recommended to use the LM1117, which is a 3.3V regulator and does not require other components to adjust the voltage as shown in the circuit diagram of this project.

Fig. 6: SD memory card interface using Level Contoller with Arduino
The Arduino pro-mini board has digital pins marked as 2, 3, 4 up to 13. Among the digital pins four pins, namely 10, 11, 12 and 13, can be configured as SS, MOSI, MISO and SCK. MISO of memory card should be connected to pin number 11, MOSI should be connected to pin number 12 and SCK should be connected to pin number 13 of Arduino pro-min. The SS of the SD card must be connected to the pin which is defined as the SS pin of the Arduino in the written code. Previous projects on how to interface an SD card with Arduino and how to use SD card to store sensor value discusses more about the details of interfacing SD card with Arduino.
The project uses the PS2 connector to connect the keyboard to the Arduino board. The PS2 connector has a pin for Data and another pin for Clock and using only these two pins the keyboard communicates with the host device. The mouse always has a 6-pin male mini-DIN connector for PS2 interface, and the host device always has the corresponding female pin. The images and pinouts of the PS2 male and female connectors are shown in the following image, the only difference between the PS2 keyboard and mouse connectors is in the color.
The PS2 male pin image

7: 6-pin mini-DIN male connector for PS2 interface
The female PS2 pin image

Fig. 8: 6-pin Mini DIN female connector plug for PS2 interface
The pinout of the PS2 male and female connectors

Fig. 9: Pinout of male and female PS2 connectors
When it comes to connecting the female connector to the circuit board, you should be able to identify the pins on the bottom of the PS2 connector and the following image will be helpful.

Fig. 10: Bottom part of the Mini DIN female connector for PS2 interface
The code written for this project uses the custom PS2 library file called “PS2Keyboard.h” which contains all the routines needed to access a PS2 mouse and the details of how to use this library to interface with a PS2 keyboard have already been discussed in a previous project on how to interface the PS2 keyboard with Arduino and how to connect PS2 keyboard with LCD using Arduino . There are basically three functions that the user can use directly in their code: “keyboard.begin”, keyboard.available and “mouse.report(data)”.
The Arduino IDE provides a library called
As the code runs, it first opens a specific file for reading and displays its entire contents in the Serial Monitor window. It then closes the same file and reopens it in recording mode. After that user can type all the text in memory card using PS2 keyboard and it will be saved in it. The next time the code runs, it will display the same data that was read from the SD card along with the previous data in the same file.
The data is displayed in the serial monitor window with the help of Serial.begin , Serial.print and Serial.println functions which have already been discussed in previous projects on how to do serial communication with Arduino , how to send and receive serial data using Arduino and how to do serial debugging with Arduino.
Before compiling the code, make sure that the “PS2Keyboard.h” and “PS2Keyboard.cpp” files are kept in the same folder where the .pde file was saved. When the coding is complete you can check and upload the code to the Arduino board as explained in the project how to get started with Arduino .
Project source code
### /*================================= EG LABS =========================== ========================== The demonstration of simple read write using Keyboard into the SD card The circuit: * SD card attached to SPI bus as follows: ** MOSI - pin 11 ** MISO - pin 12 ** CLK - pin 13 ** CS - pin 4 Keyboard: DATE PIN TO PIN NUMBER 8 CLOCK PIN TO PIN NUMBER 3 =============================== EG LABS ================== =================*/ #include#include "PS2Keyboard.h" #define DATA_PIN 8 PS2Keyboard keyboard; File myFile; // variable required to hold the file descriptor const int chipSelect = 6; // the pin number which is needs to be used as a SS pin char data; void setup { pinMode(9, OUTPUT); Serial.begin(9600); // initialize the serial port at baud rate 9600 Serial.print("Initializing SD card..."); pinMode(10, OUTPUT); // It is a must to set the hardware SS pin as output eventhough it is not using while(!SD.begin(chipSelect)); // initialize the SD card Serial.println("card initialized."); while(!(myFile = SD.open("new.txt"))); // open the file for reading while (myFile.available ) // read the file until the last byte Serial.write(myFile.read ); myFile.close; // close the file keyboard.begin(DATA_PIN); // initialize the PS2 keyboard digitalWrite(9, HIGH); } void loop { if(keyboard.available) { dat = keyboard.read; // read the data from the keyboard while(!(myFile = SD.open("new.txt", FILE_WRITE))); // open a file for writing myFile.print(dat); // write the string into the file myFile.close; Serial.write(dat); }else; } //*************PS2.h*************// #ifndef PS2Keyboard_h #define PS2Keyboard_h #include#include #include /* * PS2 keyboard "make" codes to check for certain keys. */ // Give these codes that aren't used by anything else // Making all the control key codes above 0x80 makes it simple to check for // printable characters at the calling level. #define PS2_KC_BKSP 0x80 #define PS2_KC_UP 0x81 #define PS2_KC_DOWN 0x82 #define PS2_KC_LEFT 0x83 #define PS2_KC_RIGHT 0x84 #define PS2_KC_PGDN 0x85 #define PS2_KC_PGUP 0x86 #define PS2_KC_END 0x87 #define PS2_KC_HOME 0x88 #define PS2_KC_INS 0x89 #define PS2_KC_DEL 0x8A #define PS2_KC_ESC 0x8B #define PS2_KC_CLON 0x8C // caps_lock on #define PS2_KC_CLOFF 0x8D // caps_lock off #include "binary.h" typedef uint8_t boolean; typedef uint8_t byte; /* * This PIN is hardcoded in the init routine later on. If you change this * make sure you change the interrupt initialization as well. */ #define PS2_INT_PIN 3 /** * Purpose: Provides an easy access to PS2 keyboards * Author: Christian Weichel */ class PS2Keyboard { private: int m_dataPin; byte m_charBuffer; public: /** * This constructor does basically nothing. Please call the begin(int) * method before using any other method of this class. */ PS2Keyboard; /** * Starts the keyboard "service" by registering the external interrupt. * setting the pin modes correctly and driving those needed to high. * The probably best place to call this method is in the setup routine. */ void begin(int dataPin); /** * Returns true if there is a char to be read, false if not. */ bool available; /** * Sends a reset command to the keyboard and re-initializes all the control * variables within the PS2Keybaord code. */ void reset; /** * Returns the char last read from the keyboard. If the user has pressed two * keys between calls to this method, only the later one will be availble. Once * the char has been read, the buffer will be cleared. * If there is no char availble, 0 is returned. */ byteread; /** * Returns the status of the key, the key, the key and the * caps_lock state. Note that shift and caps_lock are handled within the * Ps2Keyboard code (and the return value from read is already modified), but * being able to read them here may be useful. * This routine is optional BUT MUST ONLY be read after available has returned * true and BEFORE read is called to retrieve the character. Reading it after * the call to read will return unpredictable values. */ read_extra byte; }; #endif
###
Project source code
### #include#include #include #include "Arduino.h" #include "PS2Keyboard.h" #include "binary.h" typedef uint8_t boolean; typedef uint8_t byte; /* * I do know this is so uncool, but I just don't see a way around it * REALLY BAD STUFF AHEAD * * The variables are used for internal status management of the ISR. There're * not kept in the object instance because the ISR has to be as fast as anyhow * possible. So the overhead of a CPP method call is to be avoided. * * PLEASE DO NOT REFER TO THESE VARIABLES IN YOUR CODE AS THEY MIGHT VANISH SOME * HAPPY DAY. */ int ps2Keyboard_DataPin; byte ps2Keyboard_CurrentBuffer; volatile byte ps2Keyboard_CharBuffer; volatile byte ps2Keyboard_BufferPos; // variables used to remember information about key presses volatile bool ps2Keyboard_shift; // indicates shift key is pressed volatile bool ps2Keyboard_ctrl; // indicates the ctrl key is pressed volatile bool ps2Keyboard_alt; // indicates the alt key is pressed volatile bool ps2Keyboard_extend; // remembers a keyboard extended char received volatile bool ps2Keyboard_release; // distinguishes key presses from releases volatile bool ps2Keyboard_caps_lock; // remembers shift lock has been pressed // variables used in sending command bytes to the keyboard, eg caps_lock light volatile boolean cmd_in_progress; volatile int cmd_count; byte cmd_value; volatile byte cmd_ack_value; cmd_parity byte; volatile boolean cmd_ack_byte_ok; // sending command bytes to the keyboard needs proper parity (otherwise the keyboard // just asks you to repeat the byte) byte odd_parity(byte val) { int i, count = 1; // start with 0 for even parity for (i=0; i<8; i++) { if (val&1) count++; val = val>>1; } return count & 1; // bottom bit of count is parity bit } void kbd_send_command(byte val) { // stop interrupt routine from receiving characters so that we can use it // to send a byte cmd_in_progress = true; cmd_count = 0; // set up the byte to shift out and initialize the ack bit cmd_value = val; cmd_ack_value = 1; // the kbd will clear this bit on receiving the byte cmd_parity = odd_parity(val); // set the data pin as an output, ready for driving digitalWrite(ps2Keyboard_DataPin, HIGH); pinMode(ps2Keyboard_DataPin, OUTPUT); // drive clock pin low - this is going to generate the first // interrupt of the shifting out process pinMode(PS2_INT_PIN, OUTPUT); digitalWrite(PS2_INT_PIN, LOW); // wait at least one clock cycle (in case the kbd is mid transmission) delayMicroseconds(60); // set up the 0 start bit digitalWrite(ps2Keyboard_DataPin, LOW); // let go of clock - the kbd takes over driving the clock from here digitalWrite(PS2_INT_PIN, HIGH); pinMode(PS2_INT_PIN, INPUT); // wait for interrupt routine to shift out byte, parity and receive ack bit while (cmd_ack_value!=0); // switch back to the interrupt routine receiving characters from the kbd cmd_in_progress = false; } void PS2Keyboard::reset { kbd_send_command(0xFF); // send the kbd reset code to the kbd: 3 lights // should flash briefly on the kbd // reset all the global variables ps2Keyboard_CurrentBuffer = 0; ps2Keyboard_CharBuffer = 0; ps2Keyboard_BufferPos = 0; ps2Keyboard_shift = false; ps2Keyboard_ctrl = false; ps2Keyboard_alt = false; ps2Keyboard_extend = false; ps2Keyboard_release = false; ps2Keyboard_caps_lock = false; cmd_in_progress = false; cmd_count = 0; cmd_value = 0; cmd_ack_value = 1; } // val : bit_2=caps_lock, bit_1=num_lock, bit_0=scroll_lock void kbd_set_lights(byte val) { // When setting the lights with the 0xED command the keyboard responds // with an "ack byte", 0xFA. This is NOT the same as the "ack bit" that // follows the successful shifting of each command byte. See this website // page for a good description of all this: // cmd_ack_byte_ok = false; // initialize the ack byte flag kbd_send_command(0xED); // send the command byte while (!cmd_ack_byte_ok); // ack byte from keyboard sets this flag kbd_send_command(val); // now send the data } // The ISR for the external interrupt // This may look like a lot of code for an Interrupt routine, but the switch // statements are fast and the path through the routine is only ever a few // simple lines of code. void ps2interrupt (void) { int value = digitalRead(ps2Keyboard_DataPin); // This is the code to send a byte to the keyboard. Actually its 12 bits: // a start bit, 8 data bits, 1 parity, 1 stop bit, 1 ack bit (from the kbd) if (cmd_in_progress) { cmd_count++; // cmd_count keeps track of the shifting switch (cmd_count) { case 1: // start bit digitalWrite(ps2Keyboard_DataPin,LOW); break; case 2: case 3: case 4: case 5: case 6: case 7: case 8: case 9: // data bits to shift digitalWrite(ps2Keyboard_DataPin,cmd_value&1); cmd_value = cmd_value>>1; break; case 10: // parity bit digitalWrite(ps2Keyboard_DataPin,cmd_parity); break; case 11: // stop bit // release the data pin, so stop bit actually depends on pull-up // but this ensures the data pin is ready to be driven by the kbd for // for the next bit. digitalWrite(ps2Keyboard_DataPin, HIGH); pinMode(ps2Keyboard_DataPin, INPUT); break; case 12: // ack bit - driven by the kbd, so we read its value cmd_ack_value = digitalRead(ps2Keyboard_DataPin); cmd_in_progress = false; // done shifting out } return; // don't fall through to the receive section of the ISR } // receive section of the ISR // shift the bits in if(ps2Keyboard_BufferPos > 0 && ps2Keyboard_BufferPos < 11) { ps2Keyboard_CurrentBuffer = (value << (ps2Keyboard_BufferPos - 1)); } ps2Keyboard_BufferPos++; // keep track of shift-in position if(ps2Keyboard_BufferPos == 11) { // a complete character received switch (ps2Keyboard_CurrentBuffer) { case 0xF0: { // key release char ps2Keyboard_release = true; ps2Keyboard_extend = false; break; } case 0xFA: { // command acknowledge byte cmd_ack_byte_ok = true; break; } case 0xE0: { // extended char set ps2Keyboard_extend = true; break; } case 0x12: // left shift case 0x59: { // right shift ps2Keyboard_shift = ps2Keyboard_release? false : true; ps2Keyboard_release = false; break; } case 0x11: { // alt key (right alt is extended 0x11) ps2Keyboard_alt = ps2Keyboard_release? false : true; ps2Keyboard_release = false; break; } case 0x14: { // ctrl key (right ctrl is extended 0x14) ps2Keyboard_ctrl = ps2Keyboard_release? false : true; ps2Keyboard_release = false; break; } case 0x58: { // caps lock key if (!ps2Keyboard_release) { ps2Keyboard_caps_lock = ps2Keyboard_caps_lock? false : true; // allow caps lock code through to enable light on and off ps2Keyboard_CharBuffer = ps2Keyboard_CurrentBuffer; } else { ps2Keyboard_release = false; } break; } default: { // the real key if (ps2Keyboard_release) { // although ignore if its just released ps2Keyboard_release = false; } else { // real keys go into CharBuffer ps2Keyboard_CharBuffer = ps2Keyboard_CurrentBuffer; } } } ps2Keyboard_CurrentBuffer = 0; ps2Keyboard_BufferPos = 0; } } PS2Keyboard::PS2Keyboard { // nothing to do here } void PS2Keyboard::begin(int dataPin) { // Prepare the global variables ps2Keyboard_DataPin = dataPin; ps2Keyboard_CurrentBuffer = 0; ps2Keyboard_CharBuffer = 0; ps2Keyboard_BufferPos = 0; ps2Keyboard_shift = false; ps2Keyboard_ctrl = false; ps2Keyboard_alt = false; ps2Keyboard_extend = false; ps2Keyboard_release = false; ps2Keyboard_caps_lock = false; cmd_in_progress = false; cmd_count = 0; cmd_value = 0; cmd_ack_value = 1; // initialize the pins pinMode(PS2_INT_PIN, INPUT); digitalWrite(PS2_INT_PIN, HIGH); pinMode(dataPin, INPUT); digitalWrite(dataPin, HIGH); attachInterrupt(1, ps2interrupt, FALLING); #if 0 // Global Enable INT1 interrupt EIMSK = ( 1 << INT1); // Falling edge triggers interrupt EICRA = (0 << ISC10) (1 << ISC11); #endif } bool PS2Keyboard::available { return ps2Keyboard_CharBuffer != 0; } // This routine allows a calling program to see if other keys are held // down when a character is received: ie , , or // Note that this routine must be called after available has returned true, // but BEFORE read . The read routine clears the buffer and allows another // character to be received so these bits can change anytime after the read . byte PS2Keyboard::read_extra { return (ps2Keyboard_caps_lock<<3) (ps2Keyboard_shift<<2) (ps2Keyboard_alt<<1) ps2Keyboard_ctrl; } byte PS2Keyboard::read { byte result; // read the raw data from the keyboard result = ps2Keyboard_CharBuffer; // Use a switch for the code to character conversion. // This is fast and actually only uses 4 bytes per simple line switch(result) { case 0x1C: result="a"; break; case 0x32: result="b"; break; case 0x21: result="c"; break; case 0x23: result="d"; break; case 0x24: result="e"; break; case 0x2B: result="f"; break; case 0x34: result="g"; break; case 0x33: result="h"; break; case 0x43: result="i"; break; case 0x3B: result="j"; break; case 0x42: result="k"; break; case 0x4B: result="l"; break; case 0x3A: result="m"; break; case 0x31: result="n"; break; case 0x44: result="o"; break; case 0x4D: result="p"; break; case 0x15: result="q"; break; case 0x2D: result="r"; break; case 0x1B: result="s"; break; case 0x2C: result="t"; break; case 0x3C: result="u"; break; case 0x2A: result="v"; break; case 0x1D: result="w"; break; case 0x22: result="x"; break; case 0x35: result="y"; break; case 0x1A: result="z"; break; // note that caps lock only used on az case 0x41: result = ps2Keyboard_shift? '<' : ','; break; case 0x49: result = ps2Keyboard_shift? '>' : '.'; break; case 0x4A: result = ps2Keyboard_shift? '?' : '/'; break; case 0x54: result = ps2Keyboard_shift? '{' : '('; break; case 0x5B: result = ps2Keyboard_shift? '}' : ')'; break; case 0x4E: result = ps2Keyboard_shift? '_' : '-'; break; case 0x55: result = ps2Keyboard_shift? '+' : '='; break; case 0x29: result=" "; break; case 0x45: result = ps2Keyboard_shift? ')' : '0'; break; case 0x16: result = ps2Keyboard_shift? '!' : '1'; break; case 0x1E: result = ps2Keyboard_shift? '@' : 'two'; break; case 0x26: result = ps2Keyboard_shift? '£' : '3'; break; case 0x25: result = ps2Keyboard_shift? '$' : '4'; break; case 0x2E: result = ps2Keyboard_shift? '%' : '5'; break; case 0x36: result = ps2Keyboard_shift? '^' : '6'; break; case 0x3D: result = ps2Keyboard_shift? '&' : '7'; break; case 0x3E: result = ps2Keyboard_shift? '*' : '8'; break; case 0x46: result = ps2Keyboard_shift? '(' : '9'; break; case 0x0D: result="t"; break; case 0x5A: result="n"; break; case 0x66: result = PS2_KC_BKSP; break; case 0x69: result = ps2Keyboard_extend? PS2_KC_END : '1'; break; case 0x6B: result = ps2Keyboard_extend? PS2_KC_LEFT : '4'; break; case 0x6C: result = ps2Keyboard_extend? PS2_KC_HOME : '7'; break; case 0x70: result = ps2Keyboard_extend? PS2_KC_INS : '0'; break; case 0x71: result = ps2Keyboard_extend? PS2_KC_DEL : '.'; break; case 0x72: result = ps2Keyboard_extend? PS2_KC_DOWN : '2'; break; case 0x73: result="5"; break; case 0x74: result = ps2Keyboard_extend? PS2_KC_RIGHT : '6'; break; case 0x75: result = ps2Keyboard_extend? PS2_KC_UP : '8'; break; case 0x76: result = PS2_KC_ESC; break; case 0x79: result="+"; break; case 0x7A: result = ps2Keyboard_extend? PS2_KC_PGDN : '3'; break; case 0x7B: result="-"; break; case 0x7C: result="*"; break; case 0x7D: result = ps2Keyboard_extend? PS2_KC_PGUP : '9'; break; case 0x58: // setting the keyboard lights is done here. Ideally it would be done // in the interrupt routine itself and the key codes associated wth // caps lock key presses would never be passed on as characters. // However it would make the interrupt routine very messy with lots // of extra state associated with the control of a caps_lock // key code causing a cmd byte to transmit, causing an ack_byte to // be received, then a data byte to transmit. Much easier done here. // The downside, however, is that the light going on or off at the // right time depends on the calling program to be checking for // characters on a regular basis. If the calling program stops // polling for characters at any point pressing the caps lock key // will not change the state of the caps lock light while polling // is not happening. result = ps2Keyboard_caps_lock? PS2_KC_CLON : PS2_KC_CLOFF; if (ps2Keyboard_caps_lock) kbd_set_lights(4); else kbd_set_lights(0); break; // Reset the shift counter for unexpected values, to get back into sink // This allows for hot plugging a keyboard in and out default: delay(500); // but wait a bit in case part way through a shift ps2Keyboard_BufferPos = 0; ps2Keyboard_shift = false; ps2Keyboard_ctrl = false; ps2Keyboard_alt = false; ps2Keyboard_extend = false; ps2Keyboard_release = false; ps2Keyboard_caps_lock = false; } // end switch(result) // shift az chars here (less code than in the switch statement) if (((result>='a') && (result<='z')) && ((ps2Keyboard_shift && !ps2Keyboard_caps_lock) (!ps2Keyboard_shift && ps2Keyboard_caps_lock))) { result = result + ('A'-'a'); } // done with the character ps2Keyboard_CharBuffer = 0; return(result); } ###
Circuit diagrams
| Circuit Diagram-Using-PS2-Keyboard-Store-Text-SD-Card-Using-Arduino |  |
Project Components
- Arduino ProMini
- LED
- Resistor
Project video