Devido à sua robustez e eficiência, os motores de indução são utilizados em inúmeras aplicações industriais. Entre os aspectos cruciais que afetam o seu desempenho, as características do torque de escorregamento desempenham um papel central. O torque de escorregamento refere-se à diferença de torque entre o campo magnético rotativo e o torque real do rotor. Compreender a natureza complexa do torque de escorregamento é fundamental para otimizar a operação do motor, melhorar a eficiência energética e garantir um desempenho confiável. Este estudo investiga o fascinante mundo das características do torque de escorregamento em motores de indução e tem como objetivo descobrir seus princípios subjacentes e explorar as implicações para o projeto e controle do motor. Ao esclarecer essas propriedades, engenheiros e pesquisadores podem explorar novas maneiras de melhorar o desempenho do motor e avançar no campo das máquinas elétricas.
Torque de deslizamento: áreas estáveis vs. áreas instáveis
O torque T de um motor de indução trifásico é dado por
caso 1
Caso 2
Caso 3
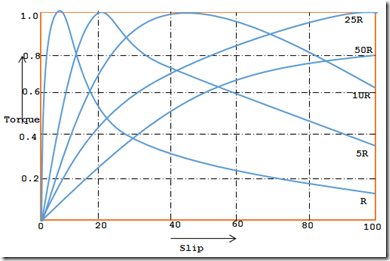
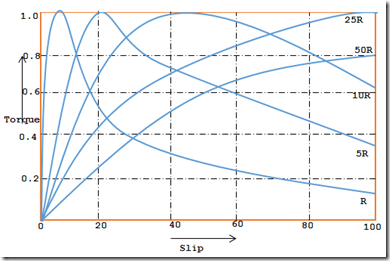
Para diferentes valores de R, as curvas da família torque-deslizamento são mostradas na Figura 1. Fica claro a partir dessas curvas que o aumento da carga no motor reduz o torque desenvolvido além do ponto de torque máximo. Qualquer aumento adicional na carga do motor fará com que o motor desacelere e eventualmente pare. A rotação do motor vai para zero quando o escorregamento atinge 1. (Se a carga na máquina for muito alta, a velocidade do rotor vai para zero e ela para, então o escorregamento é s = (NS – 0) /NS e igual a 1).
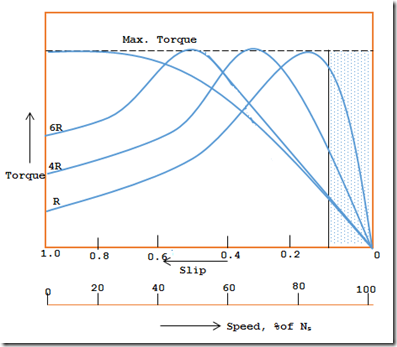
A faixa de operação estável do motor está nos valores de escorregamento s=0, que correspondem ao torque máximo. A área ativa é mostrada hachurada na Figura 2.
Diagrama de circuito equivalente de um motor de indução trifásico

Um diagrama de circuito equivalente de um motor de indução trifásico é fundamental para a compreensão de seu comportamento elétrico e características de desempenho. Ele simplifica os parâmetros elétricos do motor e permite que os engenheiros analisem e prevejam suas características operacionais sob diversas condições de carga. O circuito equivalente consiste em vários componentes principais, incluindo resistência do enrolamento do estator, reatância de fuga do estator, resistência do enrolamento do rotor, reatância de fuga do rotor e reatância de magnetização do rotor. Esses elementos detectam as interações elétricas entre os enrolamentos do estator e do rotor e os efeitos magnéticos que impulsionam a rotação do motor. Usando o circuito equivalente, os engenheiros podem examinar o comportamento de partida, funcionamento e frenagem do motor e avaliar parâmetros como torque, fator de potência e eficiência. Esse entendimento facilita o projeto de motores, estratégias de controle e técnicas de otimização, melhorando o desempenho, a eficiência energética e a confiabilidade em diversas aplicações industriais.
Compreendendo o torque de deslizamento
Compreender as características do torque de escorregamento é fundamental para engenheiros e técnicos que projetam, operam e mantêm sistemas de acionamento de motores de indução. Ao identificar os limites de áreas estáveis e instáveis, podem otimizar o desempenho do motor, evitar problemas como sobreaquecimento ou falhas e garantir a longevidade do motor. Esse conhecimento também ajuda a selecionar tamanhos e tipos de motores apropriados para aplicações específicas, contribuindo para processos industriais eficientes e confiáveis.
Estratégias de controle
Para manter o motor de indução em sua faixa estável, são utilizadas estratégias de controle. Essas estratégias podem incluir o ajuste da frequência da tensão ou o uso de inversores de frequência variável (VFDs) para regular a velocidade do motor. A implementação destas medidas mantém o funcionamento do motor estável, melhora a eficiência energética e minimiza o desgaste.
Aplicações e implicações práticas

Para uma utilização ideal, é crucial compreender as características do torque de escorregamento dos motores de indução. Engenheiros e projetistas avaliam cuidadosamente as áreas estáveis e instáveis para garantir que os motores operem dentro de limites seguros e eficientes. Para aplicações que exigem desempenho constante, como Por exemplo, máquinas industriais e bombas, é essencial permanecer dentro da faixa estável. Por outro lado, aplicações com carregamento intermitente podem utilizar a área instável de forma mais estratégica.
Inovações e perspectivas futuras
À medida que a indústria evolui e a eficiência energética se torna mais importante, o estudo das características do binário de deslizamento continua a ser um terreno fértil para a inovação. Os esforços para expandir a autonomia estável e melhorar o desempenho do motor sob diferentes cargas continuam a impulsionar a pesquisa e o desenvolvimento em tecnologia de motores.
Conclusão
Ao investigar as características do torque de escorregamento de um motor de indução, obtém-se uma compreensão mais profunda das complexidades que determinam seu desempenho. O delicado equilíbrio entre áreas estáveis e instáveis destaca a necessidade de uma engenharia precisa e de um controle operacional cuidadoso. Ao dominar estas propriedades, garantimos que os motores de indução dão uma contribuição ideal às indústrias em todo o mundo e impulsionam o progresso, a eficiência e a inovação.
Perguntas frequentes
1. O que é torque de escorregamento em um motor de indução?
Torque de deslizamento é o torque criado em um motor de indução devido à diferença de velocidade relativa entre o campo magnético rotativo e a velocidade real do rotor. É um fator crucial na conversão de energia elétrica em trabalho mecânico.
2. Qual a influência do torque de deslizamento no desempenho do motor?
O torque de deslizamento determina a capacidade do motor de fornecer o torque necessário para superar as cargas mecânicas. Afeta a eficiência, a estabilidade e o desempenho geral, especialmente quando o motor é operado em diferentes condições.
3. Qual é a região estável das características do torque de escorregamento?
O motor funciona de forma eficiente e suave na faixa estável, proporcionando uma saída de torque constante a uma velocidade relativamente constante. Esta é a área onde o motor funciona de forma ideal.
4. O que acontece na área instável da característica do torque de escorregamento?
Na faixa instável, o comportamento do motor torna-se imprevisível. Isso pode causar flutuações rápidas de velocidade, eficiência reduzida e até mesmo travamento sob cargas pesadas. Operar nesta área envolve o risco de superaquecimento e estresse mecânico.
5. Como os engenheiros garantem a operação segura do motor?
Os engenheiros analisam as características do torque de escorregamento para garantir que os motores operem em faixas seguras e estáveis. Isto inclui selecionar o motor apropriado para a aplicação, levar em conta as flutuações de carga e implementar medidas de proteção para evitar superaquecimento e travamento.