Here is a very good and interesting application to control a missile launcher model through a smartphone using an Android Bluetooth application. The missile launcher model is built with two servo motors. A servo motor (azimuth motor) rotates the missile launcher left and right, while another servo motor (elevation motor) moves the missile launcher up and down. These two servo motors are controlled via an Android Bluetooth app on a smartphone. The user presses buttons on the app to move the missile launcher up/down or turn left/right and the app will send commands via the phone's built-in Bluetooth. The project is built using a Bluetooth module and an Arduino NANO board that will receive commands from smartphones and rotate both servo motors to position the missile launcher according to user commands.
The application demonstrates the control of two servo motors using a smartphone with the help of the Bluetooth module and Arduino NANO. It's a very simple project, easy to build, but still very interesting. It only requires two to three components and few connections and that's it!!!
So let's start building the project. First let's start with a schematic diagram, its connections and followed by its operation.
Schematic diagram
 Circuit Description:
Circuit Description:
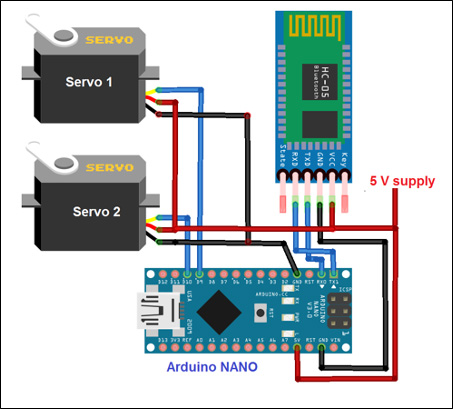
As shown in the figure, there are only 4 components in the circuit, an HC-05 Bluetooth module, an Arduino NANO board and 2 servo motors
- The HC-05 has 4 pins for interface (1) Vcc (2) Gnd (3) Tx and (4) Rx. Its Vcc and Gnd pins are connected to the 5V and Gnd pins of the Arduino board, respectively. Another two pins Tx and Rx are connected to the Rx (D1) and Tx (D0) pins of Arduino respectively.
- Both servo motors have 3 wires for interfacing (1) Vcc (2) Gnd and (3) signal. Again, the Vcc and Gnd pins are connected to the 5V and Gnd pins of the Arduino board respectively.
- The signal input of servo motor 1 is connected to the PWM output pin D9 of the Arduino board and the signal input of servo motor 2 is connected to the PWM output pin D10 of the Arduino board
Circuit operation
The circuit is powered by supplying 5V via USB or via an external 5V power supply. When power is supplied, both motors reach 0 ° and the missile launcher points to its home position.
Now to rotate the missile launcher in azimuthal (horizontal) direction or elevation (vertical) direction, you need to send commands from your smartphone using Android Bluetooth app
- Firstly, you need to open the Android application on your smartphone. This app will search and pair with the HC05 module (to pair for the first time, you need to enter a Bluetooth password for the HC05 module, which is by default 1234)k
- So someone can send different commands to an app that is transmitted via a phone's integrated Bluetooth
- Four different commands are defined in the program to rotate the missile launcher clockwise, counterclockwise, move up and down
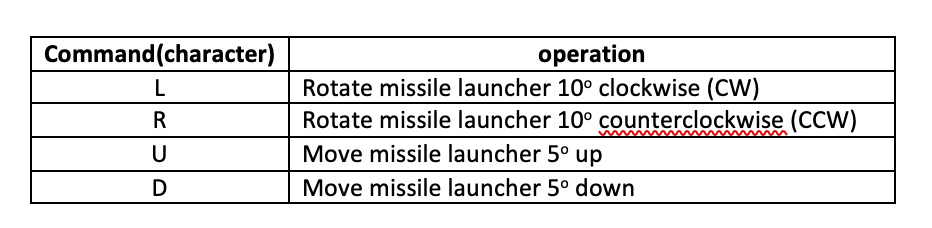
- Servo motor 2 is a lifting motor. It moves the missile launcher up and down by rotating the CW or CCW motor. Moves the missile launcher from 0 o to a maximum of 45 o
- When the command is sent from the phone, it is received by the HC-05 module. The module gives this command to the Arduino microcontroller through serial communication
- The Arduino microcontroller takes this command and compares it with all 4 defined commands. According to the match found, it will rotate servo motor 1 or servo motor 2 clockwise or counterclockwise and move the missile launcher up/down or rotate clockwise or counterclockwise
This operation of the circuit follows the program embedded in the Arduino NANO ATMega328 microcontroller. So let's see the software program for this system. Servo motor 1 is the azimuth motor. It turns the missile launcher LEFT or RIGHT by rotating the CW or CCW motor. He can rotate the missile launcher from 0 ° to a maximum of 180 ° .
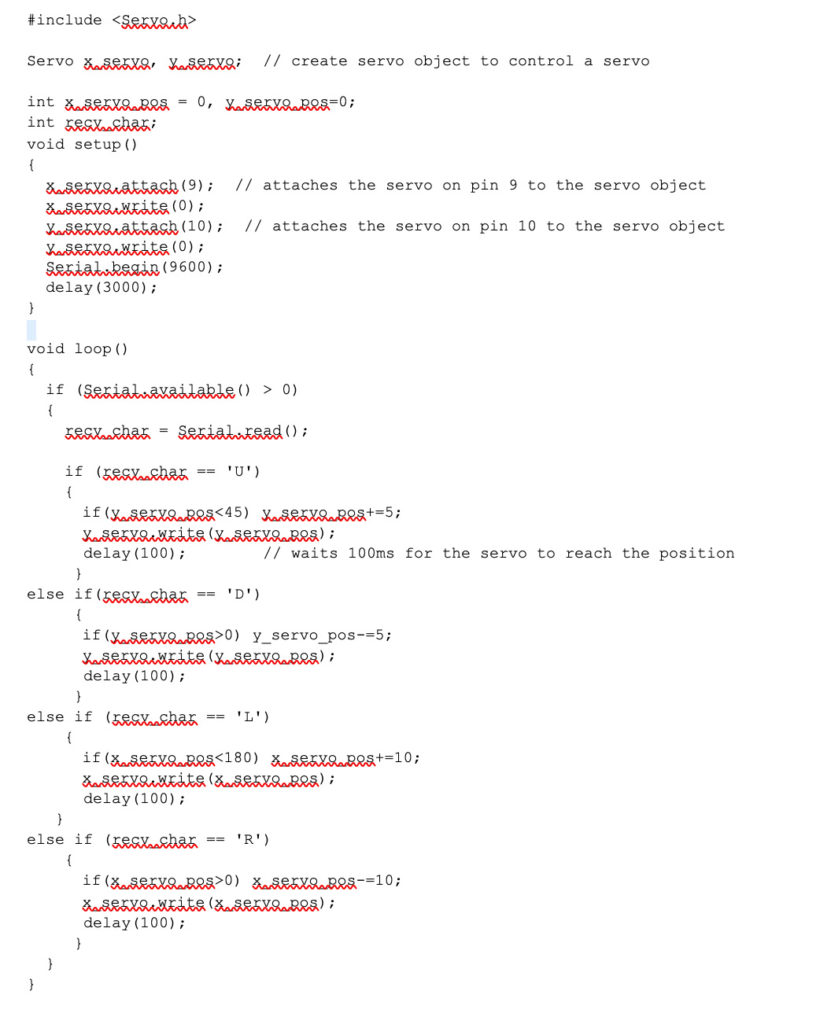
Software program
The program is written in C/C++ language using Arduino IDE software tool. It is also compiled and downloaded into the internal memory (FLASH) of the ATMega328 microcontroller using this same software. Here is the program code.