This article discusses about how to develop simple game pad hardware and interface with the Raspberrypi board and also about the technique of interfacing a game code written in HTML5 with the game pad . Here a Snake Game written in HTML5 and JavaScript has been modified so that it can be played with the new game pad with four buttons. In this project, signal, pipe, fork, etc. techniques are used.
((wysiwyg_imageupload:11011:))
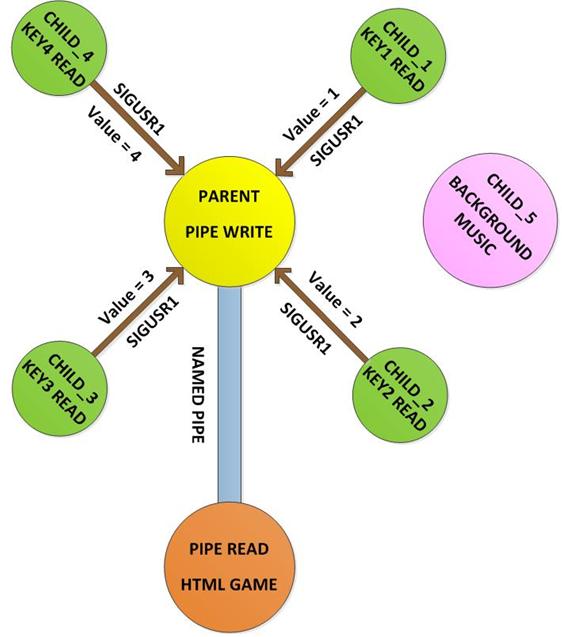
The game runs in a browser window and communicates with the game pad via a Named Pipe or FIFO. There are several processes running that can read the game pad and write the necessary commands to the FIFO to control the game. The JavaScript written in the game code simply reads the FIFO for input control data.

Fig. 2: Raspberry Pi gamepad block diagram
Project source code
###
#include <bcm2835.h> #include <pthread.h> #include <unistd.h> #include <signal.h> #include <sys/time.h> #include <stdlib.h> #include <sys/types.h> #include <sys/stat.h> #include <fcntl.h>#define IN_PIN1 RPI_GPIO_P1_07
#define IN_PIN2 RPI_GPIO_P1_22
#define IN_PIN3 RPI_GPIO_P1_18
#define IN_PIN4 RPI_GPIO_P1_16#define OUT_PIN1 RPI_GPIO_P1_15
#define OUT_PIN2 RPI_V2_GPIO_P1_13
#define OUT_PIN3 RPI_GPIO_P1_12
#define OUT_PIN4 RPI_GPIO_P1_11#define SNAKE_FIFO_NAME "xyz"
empty set_pins_input (void);
void set_pins_output(void);
void set_output_pins_low(void);
void button_signal_handler ( int sig, siginfo_t *siginfo, void *context );
empty signal_on_state_change_pin1 ( empty );
empty signal_on_state_change_pin2 ( empty );
empty signal_on_state_change_pin3 (void);
empty signal_on_state_change_pin4 (void);
void sig_set_handler (int signal, void *handler);
void sig_send_val (pid_t id, int sign, int val);pid_t son_id(5);
internal point = 0;int main (void)
{
int i;
int cobra_fifo = -1;if (!bcm2835_init )
return 1;set_pins_output;
set_output_pins_low ;
set_pins_input ;
delay (100);sig_set_handler ( SIGUSR1, &button_signal_handler );
if (! (child_id (0) = fork ))
{
signal_on_state_change_pin1 ;
_exit(0);
}
other;if (! (child_id (1) = fork ))
{
signal_on_state_change_pin2 ;
_exit(0);
}
other;if (! (child_id (2) = fork ))
{
signal_on_state_change_pin3 ;
_exit(0);
}
other;if (! (child_id (3) = fork ))
{
signal_on_state_change_pin4 ;
_exit(0);
}
other;while (1)
{
system("echo x >> xyz");
delay (100);
}bcm2835_close ;
return 0;
}empty signal_on_state_change_pin1 (empty)
{
while (1)
{
if (bcm2835_gpio_lev(IN_PIN1))
{
delay (50);
if (bcm2835_gpio_lev(IN_PIN1))
{
sig_send_val (getppid , SIGUSR1, 1);to do
{
while ( bcm2835_gpio_lev (IN_PIN1))
delay (1);
delay (50);
}
while (bcm2835_gpio_lev(IN_PIN1));sig_send_val (getppid , SIGUSR1, 1);
}
other;
}other;
delay (1);
}
}empty signal_on_state_change_pin2 (empty)
{
while (1)
{
if (bcm2835_gpio_lev(IN_PIN2))
{
delay (50);
if (bcm2835_gpio_lev(IN_PIN2))
{
sig_send_val (getppid , SIGUSR1, 2);to do
{
while ( bcm2835_gpio_lev (IN_PIN2))
delay (1);
delay (50);
}
while (bcm2835_gpio_lev(IN_PIN2));sig_send_val (getppid , SIGUSR1, 2);
}
other;
}other;
delay (1);
}
}empty signal_on_state_change_pin3 (empty)
{
while (1)
{
if (bcm2835_gpio_lev(IN_PIN3))
{
delay (50);
if (bcm2835_gpio_lev(IN_PIN3))
{
sig_send_val (getppid , SIGUSR1, 3);to do
{
while ( bcm2835_gpio_lev (IN_PIN3))
delay (1);
delay (50);
}
while (bcm2835_gpio_lev(IN_PIN3));sig_send_val (getppid , SIGUSR1, 3);
}
other;
}other;
delay (1);
}
}empty signal_on_state_change_pin4 (empty)
{
while (1)
{
if (bcm2835_gpio_lev(IN_PIN4))
{
delay (50);
if (bcm2835_gpio_lev(IN_PIN4))
{
sig_send_val (getppid , SIGUSR1, 4);to do
{
while ( bcm2835_gpio_lev (IN_PIN4))
delay (1);
delay (50);
}
while (bcm2835_gpio_lev(IN_PIN4));sig_send_val (getppid , SIGUSR1, 4);
}
other;
}other;
delay (1);
}
}void button_signal_handler (int sig, siginfo_t *siginfo, void *context)
{
if ( 1 == *( ( int * ) &siginfo -> si_value ) )
system("echo you >> xyz");
else if ( 2 == *( ( int * ) &siginfo -> si_value ) )
system("echo r >> xyz");
else if (3 == *( (int *) &siginfo -> si_value))
system("echo l >> xyz");
else if ( 4 == *( ( int * ) &siginfo -> si_value ) )
system("echo d >> xyz");
other;bcm2835_gpio_write (OUT_PIN1,st);
st = ~st;
}empty set_output_pins_low (empty)
{
bcm2835_gpio_write (OUT_PIN1, LOW);
bcm2835_gpio_write(OUT_PIN2, LOW);
bcm2835_gpio_write (OUT_PIN3, LOW);
bcm2835_gpio_write (OUT_PIN4, LOW);
}empty set_pins_output (empty)
{
bcm2835_gpio_fsel (OUT_PIN1, BCM2835_GPIO_FSEL_OUTP);
bcm2835_gpio_fsel (OUT_PIN2, BCM2835_GPIO_FSEL_OUTP);
bcm2835_gpio_fsel (OUT_PIN3, BCM2835_GPIO_FSEL_OUTP);
bcm2835_gpio_fsel (OUT_PIN4, BCM2835_GPIO_FSEL_OUTP);
}empty set_pins_input (empty)
{
bcm2835_gpio_fsel ( IN_PIN1, BCM2835_GPIO_FSEL_INPT );
bcm2835_gpio_set_pud ( IN_PIN1, BCM2835_GPIO_PUD_OFF );bcm2835_gpio_fsel ( IN_PIN2, BCM2835_GPIO_FSEL_INPT );
bcm2835_gpio_set_pud ( IN_PIN2, BCM2835_GPIO_PUD_OFF );bcm2835_gpio_fsel ( IN_PIN3, BCM2835_GPIO_FSEL_INPT );
bcm2835_gpio_fsel ( IN_PIN3, BCM2835_GPIO_FSEL_INPT );bcm2835_gpio_set_pud ( IN_PIN4, BCM2835_GPIO_PUD_OFF );
bcm2835_gpio_set_pud ( IN_PIN4, BCM2835_GPIO_PUD_OFF );
}void sig_send_msg ( pid_t id, int signo, char *msg )
{
union sign *sigdata;sigdata=malloc(sizeof(sigval union));
sigdata -> sival_ptr = message;sigqueue (id, signal, *sigdata);
free (sigdata);
}void sig_send_val ( pid_t id, int sign, int val )
{
union sign *sigdata;sigdata=malloc(sizeof(sigval union));
sigdata -> sival_int = val;sigqueue (id, signal, *sigdata);
free (sigdata);
}void sig_set_handler (int signal, void *handler)
{
struct Sigaction *act;
act=malloc(sizeof(struct Sigaction));
act -> sa_sigaction = handler;
act -> sa_flags = SA_SIGINFO;Sigaction (sign, act, NULL);
}
###
Circuit diagrams
| Circuit Diagram for Playing Snake-Raspberry-Pi Game | 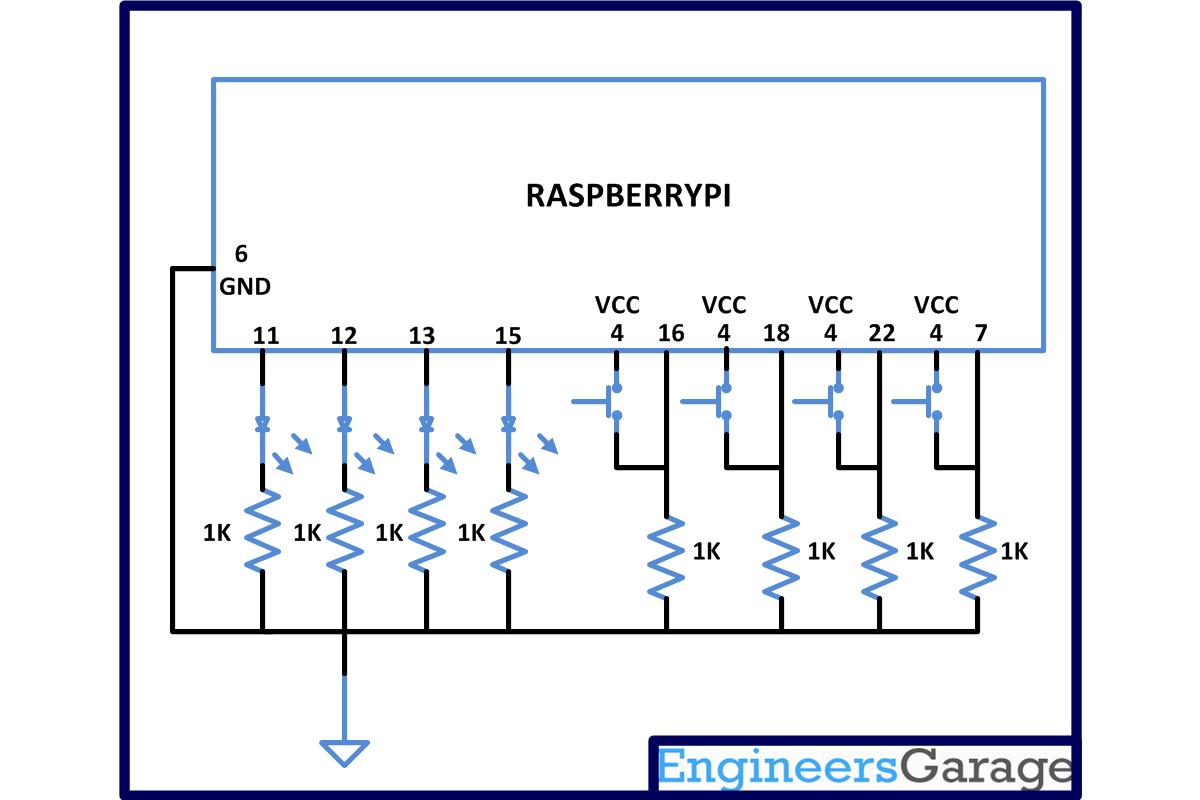 |







