DC shunt motors have been an integral part of countless commercial and industrial applications due to their robustness, reliability and efficiency. With a well-designed frame and port, these versatile motors have unique features that make them particularly suitable for a variety of tasks, from powering heavy machinery to powering generators. The brushes and commutator in these motors play a crucial role in their operation as they contribute to smooth rotation and limited slippage. The bearings provide continuous support, ensuring the longevity of the motor, while the insulation, casing and base form a solid casing that provides a protective covering and additional support for the internal components. In this article, we review these essential aspects of DC shunt motors and highlight the features that contribute to their exceptional performance and reliability.
Characteristics
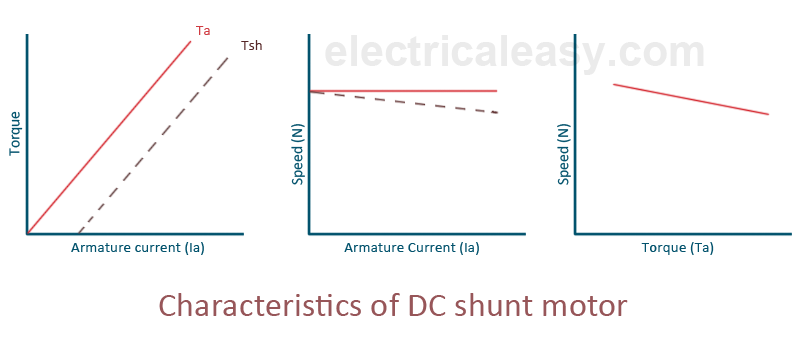
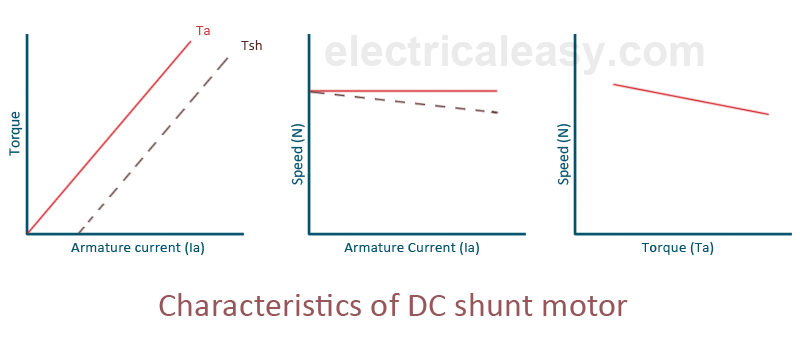
The three important characteristics of the shunt are
Torque characteristic vs. armature current (T A /I A )
We know that in a DC motor T A ∝ΦI A . The flux Φ is continuous if we ignore the armature reaction because the motor operates with a direct voltage source. Therefore, the curve between torque V is drawn. S. The armature current is a straight line passing through the origin, as shown in Fig. The shaft torque (T Sh ) is less than the anchor torque and is shown by a dotted line in the figure. From this curve it is clear that a very large current is required to start a heavy load. Therefore, the DC shunt motor must not be started at full load.

Torque (Ta)
Torque refers to the rotational force or torque that a motor produces. In a DC motor, torque is generated by the stator (field winding) and the magnetic field induced in the rotor (armature winding). When current flows through the armature winding, it creates a magnetic field that interacts with the stator magnetic field, resulting in torque that drives the motor rotation.
Armature current (Ia)
Armature current is the electrical current that flows through the armature winding of a DC motor. It is a decisive factor for the intensity of the magnetic field and, therefore, for the torque generated by the motor.
Property ownership
The Ta/Ia characteristic is generally represented as a graph with torque (Ta) plotted on the Y-axis and armature current (Ia) plotted on the X-axis. The diagram provides valuable information about the behavior, efficiency and operating range of the motor.
Meaning
The Ta/Ia characteristic is crucial to engine analysis because it helps engineers determine the engine's operating point under different load conditions. By comparing the torque requirements of the load with the torque capacity of the motor at different armature currents, an appropriate operating point can be selected for optimal efficiency and performance.
Control and protection
Understanding the Ta/Ia characteristic is also crucial for engine control and protection. Motor control systems can, for example, use this feature to regulate the armature current and therefore the torque output of the motor. Additionally, it helps determine safe operating limits to prevent the engine from entering areas of instability or saturation.
Efficiency considerations
The Ta/Ia characteristic also evaluates the overall efficiency of the engine. Operating the motor close to maximum torque is generally more efficient because it maximizes output torque and keeps armature current at a manageable level.
Speed V S. Current characteristic of the armature

Speed (N)
Speed refers to the rotational speed of the motor shaft and is usually measured in revolutions per minute (RPM) or radians per second (Rad/s). In a DC motor, the speed directly depends on the counter electromotive force (EMF) generated and the applied armature current. As the armature current varies, the motor speed also changes accordingly.
Property ownership
The N/Ia characteristic is generally represented as a graph with speed (N) plotted on the Y-axis and armature current (Ia) plotted on the X-axis. This graph provides valuable information about the speed control, efficiency and operating range of the motor.
idle speed
At very low armature currents (often close to zero), the motor operates at its maximum speed, the so-called idle speed. In this range, the motor output torque is negligible because there is no external load.
Linear area
As the armature current increases from the idle state, the motor speed decreases linearly. This linear range corresponds to the normal operating range of the motor, where it can provide different torques depending on the applied current.
Saturation region
Similar to the torque versus armature current characteristic, the N/Ia characteristic also has a saturation range. At high armature currents, the motor speed decreases more slowly as it approaches a constant value. This saturation is due to the motor reaching its maximum torque capacity and struggling to produce additional torque with increasing armature current.
Meaning
The N/Ia characteristic is critical to understanding engine speed control and its ability to maintain a constant speed under various load conditions. By analyzing this graph, engineers can determine the engine's operating point and evaluate its suitability for specific applications.
Load Considerations
When the motor is under varying load, the N/Ia characteristic helps determine how the speed responds to changes in armature current. Depending on application requirements, engineers can adjust the armature current to achieve the desired speed and control motor performance.
Control and efficiency
Motor control systems can use the N/Ia characteristic to regulate armature current to achieve specific speed targets. Furthermore, understanding this characteristic is fundamental to optimizing engine efficiency, as operating at specific points on the curve can result in better energy use.
Speed V S. Anchor torque
This curve is plotted between motor speed and armature current at different amps as shown in the figure. It can be seen from the curve that the speed decreases as the load torque increases.
Speed (N)
As mentioned previously, speed refers to the rotational speed of the motor shaft, usually measured in revolutions per minute (RPM) or radians per second (Rad/s). In a DC motor, speed is a function of the voltage applied to the armature and the reverse electromotive force (EMF) of the motor, which in turn is influenced by the speed itself.
Armature torque (Ta)
Armature torque represents the mechanical rotational force generated by the motor armature. It results from the interaction between the magnetic field generated by the stator (field winding) and the magnetic field induced by the current flow in the rotor (armature winding).
Property ownership
The N/Ta characteristic is generally represented as a graph with speed (N) plotted on the Y-axis and armature torque (Ta) plotted on the X-axis. This graph provides valuable information about the speed-torque relationship of the motor, which It is critical to understand its performance under various load conditions.
Meaning
The N/Ta characteristic is crucial for understanding the balance between engine speed and torque, which directly affects engine performance and efficiency under various operating conditions.
Speed and load capacity control
The N/Ta characteristic is closely linked to engine speed control. It measures the ability to maintain a relatively constant speed under varying loads. The slope of the N/Ta curve indicates engine speed control. Motors with better speed control can maintain a more consistent speed as torque requirements change.
Starting and acceleration
The N/Ta characteristic also plays an important role during the engine starting and acceleration phases. Understanding this relationship helps engineers design engines that can handle the required starting torque and accelerate efficiently under various load conditions.
Operating point selection
By analyzing the N/Ta characteristic, engineers can determine the ideal engine operating point for a specific application. Choosing the correct operating point ensures that the motor meets the required speed and torque requirements while operating efficiently.
Overload and protection
Understanding the speed-torque relationship is crucial to avoid overloading the engine. Operating the motor beyond its torque may result in excessive current draw, overheating and possible damage. Therefore, the N/Ta characteristic helps to establish adequate protection mechanisms to ensure safe engine operation.
Conclusion
The characteristics of DC shunt motors make them indispensable in many industrial and commercial environments. Their ability to provide smooth speed control, promising start and stop functions, and self-regulation make them reliable workhorses in electrical machines. Understanding these characteristics allows engineers and technicians to harness the full potential of DC shunt motors and use them effectively in diverse applications and industries.
Common questions
What are the main characteristics of a DC shunt motor?
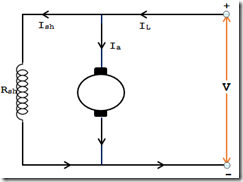
The main characteristics of a DC shunt motor include constant speed, moderate starting torque, and relatively stable operation under different loads and supply voltages. These motors have separate field windings that allow independent control of field and armature currents.
What is the difference between a DC shunt motor and a series motor?
The main difference between a DC shunt motor and a series motor is the field windings. While the shunt motor has a parallel field winding, the series motor has a series-wound field winding. This difference in configuration results in different speed and torque characteristics.
What is the equation for speed control of a DC shunt motor?
Speed control of a DC shunt motor can be achieved using the following equation: Speed ∝ (supply voltage – voltage drop due to armature feedback) / field winding turns.
How does a compound motor differ from a shunt motor in terms of speed reduction under high load?
A compound motor, unlike a shunt motor, offers better speed reduction under high loads due to the presence of series and shunt field windings. This additional winding configuration provides greater starting torque and better speed control under varying loads.
What are the benefits of using a DC shunt motor in a specific application?
One of the main advantages of using a DC shunt motor in a specific application is its ability to maintain a constant speed even under varying loads. This property makes it suitable for driving machines that require constant, smooth rotation, such as conveyor belts or rolling mills.







