Arecanut is an upright, unbranched palm that reaches heights of 12 to 30 m, depending on environmental conditions. The stem is marked by scars of fallen leaves in a regular annular shape. Arecanut almost always exists in cultivation; therefore, the conditions of their natural habitat are difficult to assess. However, it thrives in areas of high rainfall. As a shade-loving species, arecanut always does well when grown in a mixture with fruit trees. Growing bananas in the shade is even better, as it supplements the farmer's income. Most arecan nuts are harvested by climbing the tree and cutting the nuts by hand. This process may seem simple; however, it is actually very dangerous. In response, there is a genuine need to develop a device.
project objectives
In an attempt to help climbers, equipment was designed to climb the arecanu nut tree
the following objectives
It will be controlled from the ground.
Both men and women will be able to operate the device.
The hickory climber will be able to harvest faster than current methods.
The mechanization of conventional methods used to harvest crops is essential to assist the farmer. The objective is to build a prototype that can successfully climb a chestnut tree.
variable diameters and height.
Here we are designing and manufacturing motorized walnut climber. The tree climber has a base on which the rollers are fixed using self-aligning bearings at a distance equal to the diameter of a standard areca. At one end of the base the gearbox and above it the motor is mounted. Power from the engine to the rollers is transmitted via sprocket and chain transmission. To obtain the required speed of the rollers, a reduction box is used between the motor and the rollers. The machine is placed around the tree and secured to it through a swivel opening on one side of the base. Due to the weight of the engine, gearbox and some extra mass concentrated at one end of the base, the machine locks onto the tree. Now the motor is on to drive the rollers. When the rollers rotate holding the tree, the entire assembly is lifted along the length of the tree. After reaching the required height, the engine is turned off. By having adequate auxiliary equipment for spraying pesticides, plucking the nuts in the facility, and adequate control methods for this equipment, the necessary work can be performed. Once the work is completed, the motor rotates in the reverse direction to descend the tree.
Areca nut creeper design and manufacturing
The main parts of the motorized walnut climber are:
Base
Roll
Consequence
Sprocket and chain
Pulley and V-belt
Motor
Gear box
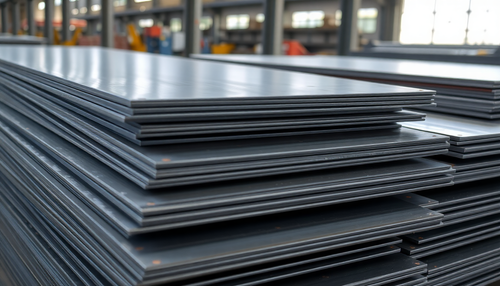
The base and rollers are made of mild steel. Mild steel is the most common form of steel because it is relatively low in price while still providing acceptable material properties for many applications. Low carbon steel contains approximately 0.05–0.15% carbon and mild steel contains 0.16–0.29% carbon, so it is neither brittle nor ductile. Carbon steel has relatively low tensile strength but is cheap and malleable; surface hardness can be increased through carbonization. It is often used when large quantities of steel are required, for example as structural steel. The density of carbon steel is approximately 7.85 g/cm3 and the Young's modulus is 210,000 MPa (30,000,000 psi). Low carbon steels suffer from yield point exhaustion when the material has two yield points. The first income limit (or upper income limit) is higher than the second and income drops sharply after the upper income limit. If a low carbon steel is stressed only to some point between the upper and lower yield point, the surface may develop Luder bands.
Benefits
Can be controlled from the ground.
Both men and women will be able to operate the device.
The arecanut climber will be able to harvest as quickly or faster than current methods.
Eliminates the risk of manually climbing the areca.
Disadvantages
The lack of vision as the device rises.
The development of a multi-axis robotic arm for harvesting is the project's biggest challenge.
It is difficult to have electricity on the farm.
Download:
Design and manufacture of walnut tree climber pdf Report download
Quando se trata de desenvolvimento de software, a escolha da linguagem de programação é fundamental. Duas opções que têm se destacado no cenário do desenvolvimento orientado a objetos são o Smallta...
O aço USI SAC 350 é um aço patinável desenvolvido para oferecer desempenho superior em ambientes onde a corrosão atmosférica é uma preocupação constante. Graças à sua composição química cuidadosame...
Você já se perguntou sobre as diferenças entre o aço inoxidável S30408 e o 304? Nesta postagem do blog, vamos nos aprofundar nas principais distinções entre esses dois materiais comumente usados. N...
A radiação térmica é um fenômeno fascinante que permeia nossa vida diária, desde o calor do sol até a energia emitida por nossos próprios corpos. No coração dessa compreensão está a equação de Stef...
Cálculo de Coeficiente de Rigidez em Barras de Aço
A engenharia civil é uma área complexa que envolve projetos e análises precisos para garantir a segurança e estabilidade dos estruturas. Em parti...
Mesmo com a sobretaxa de 25% imposta pelos EUA, as exportações brasileiras de aço e automóveis para o mercado norte-americano cresceram até 20,5% no primeiro trimestre de 2025, mostrando a resiliên...
Nos três primeiros meses de 2025, 47,5% do valor das exportações brasileiras de aço e alumínio foram destinados aos Estados Unidos. Apesar da tarifa de 25% imposta pelo governo americano, o setor s...
O Brasil se estabeleceu como o principal exportador mundial de commodities agrícolas, superando os Estados Unidos neste segmento. Esse crescimento expressivo nas exportações do agronegócio brasilei...

 Areca nut creeper design and manufacturing
Areca nut creeper design and manufacturing