
The English term “screw” is a word that has undergone significant changes in meaning over the last few centuries.
In addition to the name, the humble screw, from its invention to the standardization of being tightened clockwise and loosened counterclockwise, has lasted thousands of years.
Have you ever wondered why screws are specifically tightened clockwise?
It was a friend of Plato who invented the screw.
The six simplest mechanical tools are: screw, inclined plane, lever, pulley, wedge, wheel and axle.
Among these six simple machines, the screw is essentially a shaft with a helical surface wrapped around it. To date, screws have developed standardized sizes. The typical method of using a screw involves tightening it by turning it clockwise (opposite to loosening).
The predominance of the clockwise grip is mainly determined by the right-hander.
Initially, screws were made by hand, resulting in inconsistent details, often depending on the craftsman's preference.
In the mid-16th century, French court engineer Jaques Besson invented the lathe capable of cutting screw threads, a technology that took 100 years to spread. In 1797, Englishman Henry Maudsley invented the modern lathe, significantly improving thread precision.
However, screw sizes and fineness lacked standardization until 1841. Maudsley's apprentice, Joseph Whitworth, presented a paper to the Municipal Society of Engineers, advocating standardization of screw designs.
He proposed two points:
- The thread inclination angle must be standardized at 55°.
- Regardless of the screw diameter, a standard number of threads per inch must be adopted.
Manufacturing the first screws was a challenge, “requiring three cutting tools and two machines.”
To solve the manufacturing problems of the British standard, American William Sellers invented a flat-top screw in 1864. This small innovation simplified screw manufacturing to require only a cutting tool and a machine, making the process faster, easier and economic. .
Seller's threads became popular in the United States and quickly became the standard for American railroad companies.
Characteristics of bolted joints
Main Variables in the Tightening Process
- Torque (T): The applied tightening torque, measured in Newton meters (N·m);
- Clamping force (F): The real axial clamping force (compression) between the joined bodies, measured in Newtons (N);
- Friction Coefficient (U): Coefficient of torque consumed by the screw head and pair of threads, among others;
- Angle of Rotation (A): The angle of the thread that the screw needs to rotate based on a certain applied torque, to achieve a certain axial elongation or compression of the joined parts.
Screw tightness control methods
- Torque Control Method
Definition: A control method that stops tightening immediately when a set torque is reached.
Advantages: The control system is simple, straightforward and the tightening quality can be easily checked with a torque sensor or a high-precision torque wrench.
Disadvantages: The control accuracy is not high (pretension force error of ±25% or more) and does not fully utilize the potential of the material.
- Torque Angle Control Method
Definition: A method that first tightens the screw with a small torque and then, from this point, tightens it at a specified angle.
Advantages: High precision of the axial pretension force (±15%), achieving higher axial pretension forces, with values well distributed around the average.
Disadvantages: The control system is more complex, requiring measurement of both torque and angle; and the quality inspection department may find it difficult to identify an appropriate method for verifying tightening results.
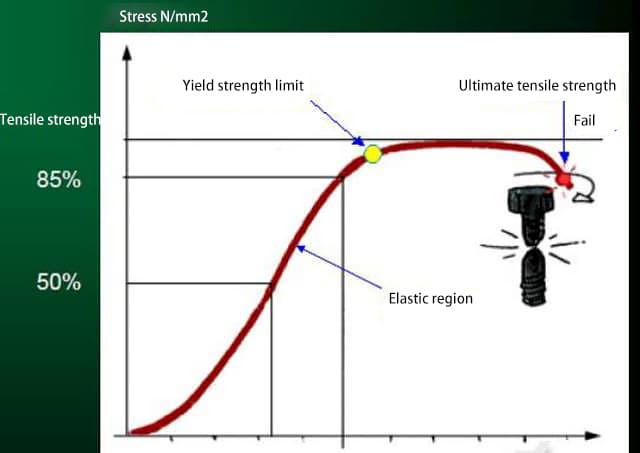
- Yield Point Control Method
Definition: A method that stops tightening when the bolt is tightened to its yield point.
Advantages: Very high clamping accuracy, with controllable pre-tension force error within ±8%; however, its accuracy mainly depends on the yield strength of the screw itself.
Disadvantages: The tightening process requires dynamic and continuous calculation and judgment of the slope of the torque curve and rotation angle, requiring high real-time performance and calculation speed of the control system.







