Tecnologia e Desenvolvimento

Robô Spy Rover implementado usando câmera IP qu...
Neste tutorial, um rover espião controlado por Bluetooth é projetado. É um robô de vigilância que servirá para monitorar e vigiar áreas de difícil acesso humano. Vigilância é o processo...
Robô Spy Rover implementado usando câmera IP qu...
Neste tutorial, um rover espião controlado por Bluetooth é projetado. É um robô de vigilância que servirá para monitorar e vigiar áreas de difícil acesso humano. Vigilância é o processo...
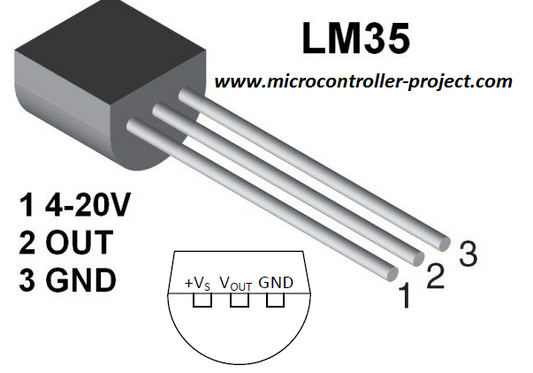
Pinagem do sensor de temperatura LM35, guia de ...
LM35 é um sensor de temperatura que emite um sinal analógico proporcional à temperatura instantânea. A tensão de saída pode ser facilmente interpretada para obter uma leitura de temperatura em...
Pinagem do sensor de temperatura LM35, guia de ...
LM35 é um sensor de temperatura que emite um sinal analógico proporcional à temperatura instantânea. A tensão de saída pode ser facilmente interpretada para obter uma leitura de temperatura em...
COMEÇANDO COM O CAN INTERFACE COM O ARDUINO
Este artigo tem como objetivo fazer com que os leitores explorem como fazer a interface do CAN Bus com o Arduino, que é usado na comunicação de sensores, atuadores e...
COMEÇANDO COM O CAN INTERFACE COM O ARDUINO
Este artigo tem como objetivo fazer com que os leitores explorem como fazer a interface do CAN Bus com o Arduino, que é usado na comunicação de sensores, atuadores e...
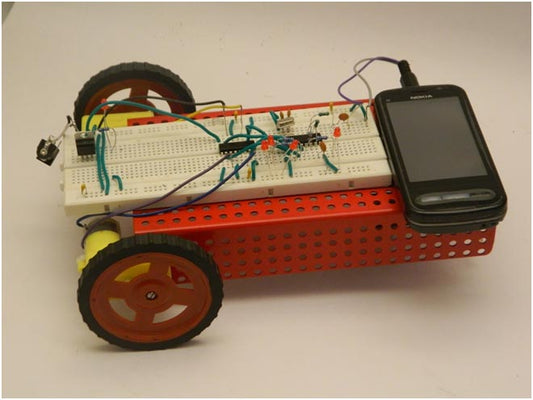
Robô controlado por telefone celular sem microc...
Robô operado por celular é um Robô cujo movimento pode ser controlado pressionando o número do celular. O robô pode se mover para frente, para trás, para a direita ou...
Robô controlado por telefone celular sem microc...
Robô operado por celular é um Robô cujo movimento pode ser controlado pressionando o número do celular. O robô pode se mover para frente, para trás, para a direita ou...

Como usar o sensor acelerômetro ADXL345
Sensores inerciais são usados para detectar movimento linear e rotacional de um objeto. Existem dois tipos de sensores inerciais – acelerômetros que detectam aceleração linear e giroscópios que d...
Como usar o sensor acelerômetro ADXL345
Sensores inerciais são usados para detectar movimento linear e rotacional de um objeto. Existem dois tipos de sensores inerciais – acelerômetros que detectam aceleração linear e giroscópios que d...
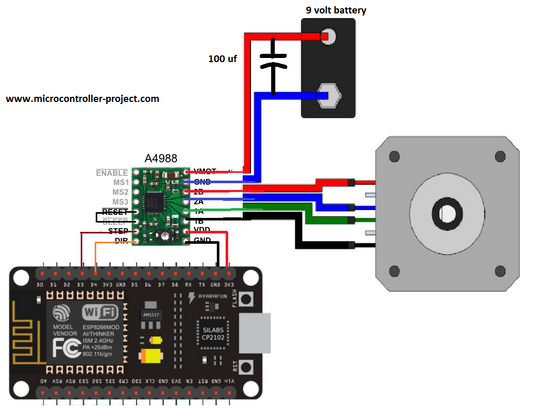
Motor de passo Nodemcu esp8266 NEMA 17 controla...
Este tutorial é sobre como controlar o motor de passo por WiFi por meio de um navegador desktop ou móvel usando o módulo WiFi nodemcu esp8266. Nodemcu funcionará como um...
Motor de passo Nodemcu esp8266 NEMA 17 controla...
Este tutorial é sobre como controlar o motor de passo por WiFi por meio de um navegador desktop ou móvel usando o módulo WiFi nodemcu esp8266. Nodemcu funcionará como um...