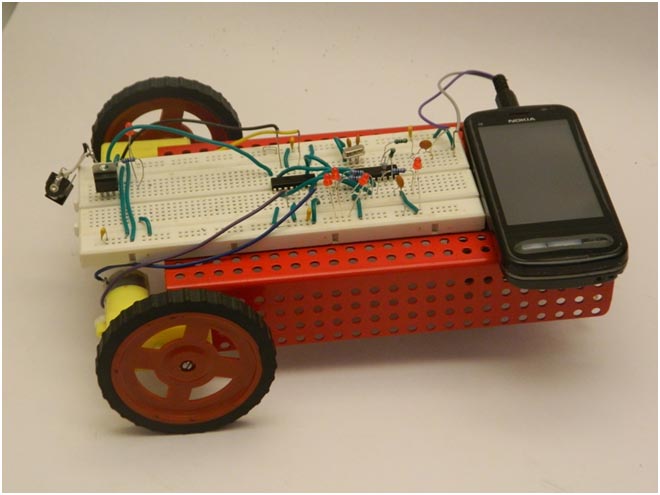
Robô operado por celular é um Robô cujo movimento pode ser controlado pressionando o número do celular. O robô pode se mover para frente, para trás, para a direita ou para a esquerda, dependendo dos números que você está pressionando. A propriedade do robô de operar pelo telefone celular ajuda você a operar o robô a alguma distância. O robô controlado pelo telefone celular usa o módulo DTMF (dual tone-multifrequency). É capaz de receber um conjunto de comandos (instruções) na forma de tons DTMF (Dual Tone Multiple Frequency) e realizar as ações necessárias. O robô é controlado fazendo chamadas para o celular conectado ao robô. O robô realiza diversas operações como avançar, retroceder, etc. se alguma tecla for pressionada durante a chamada, ouvindo do outro lado da chamada (ou seja, no celular conectado ao robô). Cada tecla corresponde a uma frequência específica que é decodificada pelo decodificador DTMF e processada pelo circuito lógico, dando a cada tecla uma operação específica, como avançar, retroceder, direita, esquerda, etc. com a faixa de trabalho tão grande quanto a área de cobertura do provedor de serviços.

Fig. 1: Protótipo de carro robótico operado móvel baseado em DTMF
Diagrama de bloco

Fig. 2: Diagrama de blocos do carro robótico operado por dispositivos móveis baseado em DTMF
Robôs controlados por telefone celular são usados para operar o robô usando o telefone celular. Ao conectar o celular ao circuito, o celular pode controlar o robô através do teclado do celular.
Estágio 1
Celular
O telefone celular é usado para dar instruções ao robô pressionando o teclado do telefone celular. A saída do robô controlado por telefone celular é de frequência de tom duplo que é recebida pelo receptor DTMF.
Estágio 2
Seção do receptor DTMF
A seção receptora DTMF é usada para receber o tom duplo vindo do telefone celular. Ele é recebido pelo DTMF e decodificado pelo mesmo DTMF IC e entregue ao circuito seguinte.
CI DTMF
Para receber a frequência de tom duplo do telefone celular e convertê-la em sinal utilizável, usamos o IC HT9370. Aqui recebemos uma explicação do IC HT9170. Ambos os IC são compatíveis entre si.
IC HT9170
HT9170 é a série de Dual Tone Multi Frequency (DTMF) receptores. Eles empregam técnicas de contagem digital para detectar e decodificar os 16 tons DTMF em um código de saída de 4 bits. Os receptores da série HT9170 não requerem filtros externos, pois usam filtros de capacitor comutados de alta precisão para filtrar sinais de baixa e alta frequência dos tons DTMF. Eles também suportam os modos de desligamento (PWDN) e inibição (INH). O modo PWDN é usado para desligar o cristal, enquanto o modo INH para inibir os tons DTMF A, B, C e D. O clock é fornecido por um cristal de 3,58 MHz.
Em termos simples, o IC HT9170 detecta e decodifica os 16 tons DTMF em uma saída de 4 bits. Caso os tons não sejam detectados, os quatro bits de saída permanecem baixos. O pino DV fica alto na detecção de um tom válido.
Diagrama de pinos:

Fig. 3: Diagrama de pinos do IC do receptor DTMF HT9170
Descrição do pino:
|
Pino Não |
Função |
Nome |
|
1 |
Entrada não inversora do amplificador operacional |
Vice-presidente |
|
2 |
Entrada invertida do amplificador operacional |
VN |
|
3 |
Terminal de saída do amplificador operacional |
GS |
|
4 |
Terminal de saída de tensão de referência |
VREFERÊNCIA |
|
5 |
Alto ativo. Inibe a detecção dos tons correspondentes a A, B, C e D. É puxado internamente para baixo. |
INH |
|
6 |
Alto ativo. Isso leva o chip ao modo de desligamento e inibe o oscilador. É puxado internamente para baixo |
PWDN |
|
7 |
Conexão para cristal padrão de 3,579545 MHz |
X1 |
|
8 |
X2 |
|
|
9 |
Terra (0V) |
VSS |
|
10 |
Alto ativo; Habilita a saída D0-D3 |
OE |
|
11 |
Terminais de saída |
D0 |
|
12 |
D1 |
|
|
13 |
D2 |
|
|
14 |
D3 |
|
|
15 |
Dados válidos. Aumenta a recepção de sinal DTMF válido; caso contrário permanece baixo |
DVD |
|
16 |
Saída de direção antecipada |
Husa |
|
17 |
O tempo de aquisição do tom e o tempo de liberação podem ser definidos usando resistor externo e capacitor |
TR/GT |
|
18 |
Tensão de alimentação; 5 V (2,5 V-5,5 V) |
VDD |
Estágio de condução motorizada
Etapa 3
Estágio de condução motorizada
Nesta etapa o driver do motor L293D IC é usado para acionar o motor. À medida que o sinal vem do IC do inversor, ele aciona o motor de acordo com os sinais que chegam.
CI L293D
L293D é um circuito integrado (IC) de driver de motor de ponte H dupla. Os drivers do motor atuam como amplificadores de corrente, pois recebem um sinal de controle de baixa corrente e fornecem um sinal de corrente mais alta. Este sinal de corrente mais alto é usado para acionar os motores.
L293D contém dois circuitos de driver de ponte H integrados. Em seu modo comum de operação, dois motores CC podem ser acionados simultaneamente, tanto no sentido direto quanto no sentido reverso. As operações do motor de dois motores podem ser controladas pela lógica de entrada nos pinos 2 e 7 e 10 e 15. A lógica de entrada 00 ou 11 irá parar o motor correspondente. As lógicas 01 e 10 irão girá-lo no sentido horário e anti-horário, respectivamente.
A habilitação dos pinos 1 e 9 (correspondentes aos dois motores) deve estar em nível alto para que os motores entrem em operação. Quando uma entrada de habilitação é alta, o driver associado é habilitado. Como resultado, as saídas tornam-se ativas e funcionam em fase com suas entradas. Da mesma forma, quando a entrada de habilitação é baixa, esse driver é desabilitado e suas saídas ficam desligadas e no estado de alta impedância.

Fig. 4: Diagrama de pinos do IC do driver do motor L293D
Tabela verdade para movimento do robô
|
Sr. Não |
EM 1 |
EM 2 |
IN3 |
IN4 |
Movimento do robô |
|
1 |
1 |
0 |
0 |
1 |
Avançar |
|
2 |
1 |
1 |
1 |
1 |
Parar |
|
3 |
1 |
0 |
1 |
0 |
Esquerda |
|
4 |
0 |
1 |
0 |
1 |
Certo |
A lógica do sinal será alterada de acordo com a condição.
Passos para construir o robô controlado por telefone celular
Acessórios necessários para fazer um robô controlado por telefone celular
|
Sr. Não. |
Nome do componente |
Quantidade |
| 1. | Suporte duplo para pilhas AA | 1 |
| 2. | Chassi (plataforma robótica) | 1 |
| 3 | Tábua de ensaio | 1 |
| 4 | Pinça | 1 |
| 5. | Stripper | 1 |
| 6. | Um fio central | Conforme o uso |
| 7. | Alicate de bico | 1 |
| 8 | Chave de fenda | 1 |
Montagem Mecânica de chassi robótico
Passo 1:
Pegue um chassi robótico.

Fig. 5: Imagem Representacional do Chassi Principal do Robô
Passo 2:
Pegue o motor BO conforme mostrado no diagrama.
Etapa 3:

Fig. 6: Imagem mostrando a fixação do motor ao chassi do robô
Pegue um parafuso M2.5 (25) para encaixar o motor BO no chassi. Monte o motor na direção ascendente conforme mostrado na figura. Aqui o último furo do chassi é utilizado para encaixar o motor.
Observação
Aqui guardei o parafuso do motor M2.5 (25) no polietileno separado e também não misture com outro parafuso.

Fig. 7: Imagem mostrando a fixação do motor em ambos os lados do chassi do robô
Passo 4

Fig. 8: Imagem mostrando a fixação das rodas aos motores do robô
Encaixe as duas rodas em ambos os eixos do motor conforme mostrado na figura. Fixe o motor com parafuso de roda vermelho auto-roscante.
Etapa 5

Fig. 9: Imagem representacional da roda giratória e da tira para o robô
Pegue a roda giratória e a tira da roda giratória conforme mostrado no diagrama.
Etapa 6

Fig. 10: Imagem mostrando a fixação da roda giratória na tira do robô
Insira três parafusos M3 -10 na roda giratória. Agora encaixe a roda giratória na tira da roda giratória na direção para fora, conforme mostrado na figura.
Etapa 7
Agora encaixe a tira da roda giratória na posição intermediária do chassi conforme mostrado no diagrama usando dois parafusos M3-10.
Agora sua plataforma robótica está pronta para ser usada.

Fig. 11: Imagem mostrando a fixação da tira da roda giratória no chassi do robô
Conexão da placa de ensaio

Fig. 12: Imagem mostrando linhas e colunas em uma placa de ensaio
· Forneça alimentação positiva de +5 volts na primeira linha.
· Conecte o GND na segunda linha da protoboard.
· Conecte +5 volts da linha superior com a linha abaixo para fazer a linha abaixo de +5 volts.
· Conecte a linha gnd superior com a linha gnd inferior para formar a linha gnd da linha abaixo.
· Faça um curto nas linhas do meio abaixo conectando a linha de +5 volts a +5 volts e a linha terra com a linha terra.

Fig. 13: Imagem típica de breadboard
Construção de robô controlado por celular em protoboard
· Fonte de energia
· Motorista
· Módulo DTMF
Projetando a seção de fonte de alimentação
Fonte de energia
Descrição geral
A fonte de alimentação é usada para fornecer energia a todo o conjunto do circuito. Os componentes abaixo são usados para fazer a seção de fonte de alimentação.
Lista de componentes para fonte de alimentação
|
Sr. Não. |
Nome do componente |
Lista de componentes |
| 1 | Tomada CC | 1 |
| 2 | CI regulador de tensão 7805 | 1 |
| 3 | Led de 3mm | 1 |
| 4 | Resistor (220?) (Vermelho, Vermelho, Preto, Preto) | 1 |
Explicação do componente
Faça a conexão abaixo para fonte de alimentação conforme mostrado na imagem abaixo.
Tomada CC

Fig. 14: Imagem típica de DC Jack

Fig. 15: Diagrama de pinos do conector DC
Diagrama de pinos de conexão 7805
|
Sr. Não |
Pino 7805 Não |
Nome do pino 7805 |
|
1 |
Pino 1 |
+12 volts (fornecido pela bateria) |
|
2 |
Pino 2 |
Gnd |
|
3 |
Pino3 |
+ 5 (saída para fornecer o circuito inteiro) |
Consultando as imagens abaixo você pode fazer o circuito da fonte de alimentação
1. Imagem da placa de ensaio

Fig. 16: Imagem representacional do circuito de fonte de alimentação na placa de ensaio
2. Diagrama esquemático para fonte de alimentação

Fig. 17: Diagrama do circuito da fonte de alimentação do robô
Teste da seção de fonte de alimentação

Fig. 18: Imagem representacional do circuito do driver do motor na placa de ensaio
Se o LED acender, significa que a conexão do circuito da fonte de alimentação está correta. e agora você pode dar poder a toda a assembléia.
Projetando a seção do driver do motor
Seção do driver do motor
Descrição geral
Agora você criou uma seção do driver do motor que é usada para acionar o motor. Aqui para acionar o motor você usa L293D IC.
Lista de componentes para seção de driver de motor
|
Sr. Não |
Nome do componente |
| 1. | Seção IC L29D3 |
| 2. | Um fio central |
Projeto da seção do driver do motor
Consultando as imagens e tabela abaixo você pode fazer e testar a seção do driver do motor.
Conexão de pino L293D
|
Sr. Não |
Pino L293 D |
Tensão de alimentação |
| 1 | Pino nº 1 | +5 volts |
| 2 | Pino nº 9 | +5 volts |
| 3 | Pino nº 16 | +5 volts |
| 4 | Pino nº 8 | +12 volts |
| 5 | Pino nº 4 e 5 | Gnd |
| 6 | Pino nº 12 e 13 | Gnd |
Conexão do motor com L293D IC
|
Sr. Não. |
Pinos de saída |
Fio do motor |
| 1 | o/p1 | Primeiro fio do primeiro motor |
| 2 | o/p2 | Segundo fio do primeiro motor |
| 3 | o/p3 | Primeiro fio do segundo motor |
| 4 | o/p4 | Segundo fio do segundo motor |
Imagem da placa de ensaio

Fig. 19: Imagem representacional do circuito do driver do motor na placa de ensaio
Imagem esquemática da seção do driver do motor

Fig. 20: Diagrama de circuito do driver de motor baseado em IC L293D
Forneça a alimentação abaixo no terminal de entrada do L293d IC para testar o motor
|
Sr. Não. |
Nome dos pinos |
Fornecimento dado |
|
1 |
Em 1 |
+5 |
|
2 |
Em 2 |
Gnd |
|
3 |
Em3 |
+5 |
|
4 |
In4 |
Gnd |
Observação
· Curto-circuito entre os pinos 4 (gnd) e 5 (gnd) com o jumper. O jumper pode ser retirado do fio.
· Da mesma forma, também faça um curto nos pinos 12 (gnd) e 13 (gnd) do IC l293D.
Teste da seção do driver do motor
Passo 1
Conecte um fio do primeiro motor ao pino o/p1 do L293D IC. E o segundo é com o segundo o/p2 do IC L293D.
O motor deve girar no sentido horário a partir da parte frontal. Se o motor girar no sentido anti-horário, faça-o no sentido horário trocando seu fio pelos pinos L293D o/p.
Passo 2
Conecte um fio do segundo motor ao pino o/p3 do L293D IC. E o segundo com o segundo o/p4 do L293D IC.
Agora o motor deve girar no sentido anti-horário a partir da parte frontal. Se o motor girar no sentido horário, faça-o no sentido anti-horário trocando seu fio pelos pinos L293D o/p.
Módulo DTMF
Agora o chassi deve ser movido para frente.
Módulo DTMF
Descrição geral
Os módulos DTMF são utilizados para receber o sinal vindo do celular e controlar o robô através do sinal de saída vindo do IC DTMF.
Módulo DTMF
Para fazer o módulo DTMF são necessários os componentes abaixo.
O componente necessário para fazer o circuito lógico é mostrado na tabela abaixo.
|
Sr. Não. |
Nome do componente |
Quantidade |
| 1. | IC HT9370 | 1 |
| 2. | Cristal de 3,57 Hz | 1 |
| 3. | Led (5mm) | 4 |
| 4. | 10 mil? R9 (marrom, preto, preto, vermelho) | 4 |
| 5. | 100 mil? R8 (marrom, preto, preto, laranja) | 2 |
| 6. | Capacitor C1 e C2 (33pF) Capacitor cerâmico | 2 |
| 7. | Capacitor C4 (104) Capacitor Cerâmico | 1 |
| 8. | Capacitor C5(104) Capacitor cerâmico | 1 |
| 8. | 330 k (laranja, laranja, preto, laranja) | 1 |
| 9. | Entrada de áudio | 1 |
Explicação do Componente
Entrada de áudio

Fig. 21: Imagem típica de tomada de áudio
Os conectores de áudio são usados para conectar o celular ao circuito DTMF.
Abra a tomada de áudio e conecte o terminal mais longo (GND) com o fio de dez núcleos e o terminal menor do lado esquerdo (terminal de entrada) com outro fio de dez núcleos.

Fig. 22: Imagem mostrando a fiação interna do conector de áudio
Conecte o pino de entrada a um terminal do capacitor e outro ao terminal GND.
Conexão da seção IC do Módulo DTMF
|
Sr. Não |
Fixar não |
Conexão de componentes |
| 1 | 1 | Curto com pino nº 4 |
| 2 | 2 | Resistor de 100 k e capacitor de 104 |
| 3 | 3 | Resistor de 100 k com pino nº 2 |
| 4 | 5 | Curto com pino nº 9 |
| 5 | 6 | Curto com pino nº 9 |
| 6 | 7 e 8 | Cristal de 3,57 MHz |
| 7 | 10 | + 5 volts |
| 8 | 11,12,13,14 | Resistor 10k com terminal positivo do led |
| 9 | 15 | Abrir |
| 10 | 16 | 330 mil Resistente |
| 11 | 17 | 104 capacitores |
| 12 | 18 | +5 volts |
Faça também a conexão abaixo
· Faça um curto entre os pinos 1 e 4 e também faça um curto entre os pinos 5 e 9 e 6.
· Conecte um terminal do resistor de 100 k com o pino nº 2 e outro terminal com o terminal do capacitor 104 e outro terminal com a entrada do conector de áudio.
· Conecte um terminal de 100k ao pino nº 3 e outro terminal ao pino nº 2.
· Conecte o cristal de 3,57 MHz aos pinos 7 e 8 e também conecte um terminal de dois capacitores de 33pf ao cristal e outro terminal ao gnd.
· Dê + 5 volts ao pino nº 10 do IC.
· Conecte o pino 11,12,13,14 com um terminal do resistor de 1k e outro terminal com o terminal positivo do led e seu terminal negativo com o GND.
· O pino nº 15 permanece aberto.
· Pino nº 16 com um terminal do resistor de 330 k e outro terminal com o pino nº 17.
· Conecte o pino nº 17 com um terminal do capacitor 104 e é outro pino terminal com +5 volts.
· Dê +5 volts ao pino nº 18.
· Conecte o fio de entrada do conector de áudio com o capacitor 104 e outro GND com o pino GND na placa de ensaio.
1. Imagem da placa de ensaio do módulo DTMF

Fig. 23: Imagem representacional do circuito decodificador DTMF na placa de ensaio
2. Layout esquemático da seção do Módulo DTMF

Fig. 24: Diagrama de circuito do receptor DTMF baseado em IC CM8870CP
Solução de problemas do circuito
· Verifique a continuidade de todo o circuito colocando o multímetro no modo de continuidade.
· Verifique também a tensão nos diferentes pontos do circuito usando o multímetro. Verifique também a tensão nos diferentes pinos do IC.
· Conecte o capacitor de 0,1 µf entre os pinos +5 e Gnd em qualquer local aleatório da placa de ensaio.
· Você pode verificar a frequência do cristal no CRO. Deve chegar a aproximadamente 3,57 MHz.
· Você também pode verificar a forma de onda do sinal de áudio vindo do celular no CRO. Veja a imagem abaixo proveniente do sinal de áudio vindo do celular.

Fig. 25: Imagem de sinais de áudio do celular exibidos em um CRO
Diagrama de circuito e montagem completa
Circuito totalmente conectado para robô controlado por telefone celular
Imagem da placa de ensaio

Fig. 26: Imagem representativa do circuito de controle completo para Robot on Breadboard
Imagem esquemática

Fig. 27: Diagrama de Circuito de Robô Sem Microcontrolador Operado Móvel
Conexão do motor com L293D IC
|
Sr. Não. |
Pinos de saída |
Fio do motor |
| 1 | o/p1 | Primeiro fio do primeiro motor |
| 2 | o/p2 | Segundo fio do primeiro motor |
| 3 | o/p3 | Primeiro fio do segundo motor |
| 4 | o/p4 | Segundo fio do segundo motor |
Conexão da saída do módulo DTMF com o IC L293D
Aqui Q1, Q2, Q3, Q4 representam a saída do módulo DTMF.
| Sr. Não |
Saída DTMF |
Saída L293D |
|
1 |
1º trimestre |
EM 1 |
|
2 |
2º trimestre |
EM 2 |
|
3 |
3º trimestre |
IN3 |
|
4 |
4º trimestre |
IN4 |
Movimento da plataforma robótica
· O movimento da plataforma robótica depende da conexão do motor com o IC L293D.
· Insira a tomada de áudio no celular e verifique a indicação do fone de ouvido na tela do celular.
· Abra a janela do teclado e envie qualquer tecla como 1,2,3.4 etc.
· Pressione qualquer tecla do celular como 1,2,3,4 e observe o movimento robótico conforme a tecla pressionada.
Montagem completa de robô controlado por celular

Fig. 28: Imagem representacional da montagem completa do robô operado móvel
· Coloque também a protoboard na plataforma robótica.
· Pegue também um suporte para célula de bateria e coloque-o na plataforma robótica.
· Você pode alimentar a plataforma robótica através do suporte da célula da bateria ou usando um adaptador de 12 volts.

Fig. 29: Protótipo de Carro Robótico Operado Móvel







