En los últimos años ha crecido enormemente el interés por los vehículos aéreos no tripulados ( UAV ) y su uso para una gama cada vez más amplia de aplicaciones. Este tipo de aeronaves pueden controlarse de forma remota o programarse para volar de forma autónoma. Se han utilizado para diferentes tipos de aplicaciones como entidades individuales en tareas tanto militares como civiles. La investigación relacionada con este tipo de sistemas se está llevando a cabo en multitud de áreas, desde el diseño de aeronaves más eficientes orientadas a aplicaciones específicas, al desarrollo de electrónicas de control mejoradas que proporcionen mejores comportamientos autónomos, pasando por estrategias optimizadas de planificación de rutas, o la apertura de nuevas áreas de aplicación. Actualmente, se está abriendo un campo de investigación completamente nuevo en el ámbito de la coordinación de equipos de vehículos aéreos no tripulados para llevar a cabo diferentes misiones de forma cooperativa. Este campo está todavía en sus inicios y se están explorando muchos enfoques nuevos e interesantes para diferentes aplicaciones. Ejemplos de estos son trabajos relacionados con la planificación de trayectorias en equipos de vehículos aéreos no tripulados, el seguimiento de objetivos en tiempo real y muchos otros.
La reducción del tamaño y las crecientes capacidades de los dispositivos microelectrónicos en los últimos años han abierto la puerta a pilotos automáticos más capaces e impulsado más aplicaciones de vehículos aéreos no tripulados (UAV) en tiempo real. Payload Directed Flight (PDF), uma tarefa de pesquisa da Diretoria de Missão de Pesquisa Aeronáutica da NASA, Programa Aeronáutico Fundamental, Projeto Subsônico de Asa Fixa, visa resolver isso desenvolvendo um conjunto de capacidades tanto em hardware quanto em software que permite tais aplicações em tiempo real. Específicamente, la investigación de vuelos dirigidos a la carga útil examina modos, arquitecturas y algoritmos de piloto automático centrados en sensores y carga útil que proporcionan capas de guía, navegación y control inteligentes para que los vehículos de vuelo alcancen objetivos de misión relacionados con los sensores de carga útil al tener en cuenta diversas limitaciones. tales como limitaciones de desempeño de la aeronave, seguimiento y estimación de objetivos, evitación de obstáculos y satisfacción de restricciones. El problema central abordado por PDF es el control de una planta conocida y controlable que interactúa con un sistema externo basado en la retroalimentación de datos de sensores y carga útil que proporciona observación y comprensión parciales del sistema externo, para satisfacer los objetivos y limitaciones de la misión del sistema combinado.
Con el éxito progresivo en el campo de batalla en las Operaciones Tormenta del Desierto, Fuerza Aliada, Libertad Duradera y Libertad Iraquí, los vehículos aéreos no tripulados (UAV) están capturando la imaginación de los ejércitos de todo el mundo. El espectro de los vehículos aéreos no tripulados iraquíes con un alcance de más de 300 millas y portadores de armas químicas y biológicas fue descrito por el Secretario de Estado estadounidense, Colin Powell, en sus declaraciones de febrero de 2003 ante el Consejo de Seguridad de la ONU.
BUSQUEDA DE LITERATURA
Se pueden desplegar pequeños vehículos aéreos no tripulados (UAV) en las líneas del frente de combate para proporcionar conocimiento de la situación a pequeñas unidades de tropas a través de información en tiempo real sobre las áreas circundantes.1 Los pequeños vehículos aéreos no tripulados y los microvehículos de ala fija (como el Dragon Eye , Aerosonde, Hornet y Wasp) se han vuelto frecuentes y han demostrado capacidades de vuelo y niveles de autonomía impresionantes.2 Estos vehículos aéreos no tripulados pueden pesar tan solo unos pocos gramos. Sin embargo, incluso los modelos más ligeros deben volar lo suficientemente rápido como para proporcionar suficiente sustentación para volar. Estos aviones de ala fija también requieren espacio para girar y, aunque las investigaciones han estudiado su capacidad para volar en pequeños círculos sobre un área específica, son difíciles de volar en lugares reducidos, como entornos urbanos y espacios interiores pequeños.
Los vehículos aéreos no tripulados de ala giratoria tienen el potencial de ser muy útiles si pueden flotar y volar verticalmente.
Actualmente, los UAV VTOL como Fire Scout y Hummingbird tienen la capacidad de volar de forma autónoma, aterrizar en un lugar específico y despegar nuevamente. Los UAV más pequeños con estas capacidades tendrían muchas aplicaciones, incluido volar a través de edificios para operaciones de búsqueda y rescate o de vigilancia.
Sin embargo, los desafíos técnicos para los pequeños sistemas UAV de ala giratoria son numerosos. Se requieren altas relaciones empuje-peso para el sistema de propulsión. También será importante tener resistencia suficiente para llevar a cabo una misión importante. Será esencial una combinación cuidadosa de baterías, motores eléctricos y rotores; y estos deberán dimensionarse para transportar la carga útil requerida. Incorporar un sistema de control semiautónomo confiable en estos pequeños vehículos, de modo que el operador no tenga que monitorear constantemente su desempeño o ubicación, será un gran desafío, ya que sólo podrán transportar los sistemas de microprocesadores y fuentes de alimentación más pequeños. junto con sistemas de sensores muy ligeros y económicos. Además, un sistema de posicionamiento global (GPS) no funcionará en interiores, por lo que habrá que utilizar otros sensores para vuelos en interiores. El software debe ser muy compacto para caber en la memoria disponible, pero lo suficientemente potente como para proporcionar un control inteligente con datos de sensores de calidad limitada.
DETALLES TEÓRICOS Y ANÁLISIS DEL TEMA
El Proyecto consta de 3 secciones.
} · Sección de modelos de aviones
· Sección Electrónica
· Sección de Comunicación
Sección de Modelos de Aeronaves:
Esta sección consta de la parte de diseño, es decir, la estructura general del Drone, la
diseño del mecanismo de vectorización de empuje, elección de hélices para lograr la relación empuje-peso requerida, diseño del servo varillaje, ensamblaje del motor, posicionamiento de componentes, etc.
Sección Electrónica:
Esta sección incluye el diseño del mecanismo de suministro y distribución de energía. También consideramos varios factores como el consumo de energía, el empuje máximo y las RPM antes de seleccionar motores BLDC como motor de propulsión principal. El cerebro del UAV es su sistema de control de vuelo que consta del procesador Atmel 324 (kk2) o atmel 328 (HK), sensores de giroscopio y acelerómetro que forman la Unidad de Medición Inercial.
Usamos y comparamos dos tipos de placas IMU, a saber.
1. Tablero de control del cuadricóptero Hobbyking v3.
dos. Tablero de control multirotor KK2.0.
Sección de Comunicación:
Para controlar el UAV de forma remota, utilizamos un par transmisor-receptor de 6 canales que utiliza el espectro de banda ISM (2,4 GHz) para la comunicación.
El transmisor transmite señales PPM utilizando espectro ensanchado por salto de frecuencia que el receptor decodifica para formar señales PWM de tiempo que oscilan entre 1 ms y 2 ms y una frecuencia de 50 Hz.
Para lograr la transmisión de audio/vídeo en tiempo real, podemos utilizar un transmisor-receptor compatible con DVR y una cámara CCD PAL de 1/3”. Hay varias versiones disponibles con frecuencia de transmisión como 900 MHz, 2,4 GHz, 5,8 GHz, por lo que si está utilizando un transmisor de 2,4 GHz, no utilice un transmisor de vídeo de la misma frecuencia, ya que provocará interferencias y provocará un bloqueo.
En este proyecto utilizamos una pequeña cámara tipo llavero que graba vídeo en una tarjeta SD (sin RTVT).
Nota: Este proyecto está relacionado con el pasatiempo RC, que es un pasatiempo emergente en la India y no hay muchos aficionados en la India en este momento.
Entonces, si quieres conocer este hobby, los conceptos básicos del avión Rc, el coche Rc, etc., consulta estos enlaces.
Sección de Comunicación
En el apartado de comunicación y electrónica utilizaremos prácticamente productos disponibles en el mercado y no haremos nada excepto en el apartado de aeromodelismo.
Ahora para el control inalámbrico de nuestro UAV necesitaremos un transmisor y un receptor.
Ahora bien, esta sección puede ser demasiado grande si intento hacer una comparación de todos los Txr-Rxr disponibles en el mercado, o intento hacer uno, pero no es factible, así que usaremos un par Txr-Rxr disponible en el mercado. .
Estos pares Txr-Rxr no son un simple transmisor de infrarrojos ni algún tipo de decodificador y codificador que podría haber utilizado en algún proyecto de robótica. Estos pares están hechos especialmente para que los aficionados al RC controlen aviones, helicópteros, automóviles, etc.
También soy un principiante en este campo y todavía tengo que volar un avión RC con éxito.
Este par Txr-Rxr utiliza ancho de banda gratuito sin licencia para la comunicación.
Anteriormente se utilizaba la frecuencia de 75 MHz, pero ahora todo el mundo ha cambiado a sistemas de 2,4 GHz, ya que es la banda de frecuencia gratuita y sin licencia asignada por el gobierno.
El par Txr-Rxr de 2,4 GHz utiliza una técnica de espectro ensanchado que los hace resistentes a las interferencias y proporcionan un funcionamiento sin fallos. Algunos usan tecnología FHSS, otros usan tecnología DSSS y algunos usan FASST híbrido (FHSS+DSSS).
Ahora el punto más importante, el rango de precios de la radio varía desde Rs. 2.000 – 20.000 dependiendo de las funciones que ofrece la radio. Las radios costosas y de alta gama permiten programar y guardar diferentes configuraciones para diferentes modelos sin necesidad de conectarse a una computadora. También proporcionan algún tipo de telemetría donde la cantidad de batería restante en su avión se muestra en la pantalla del Txr.
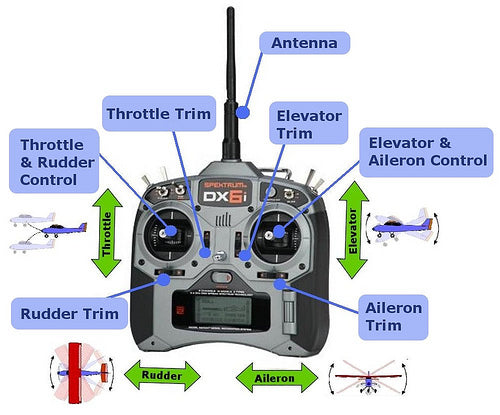
Conceptos básicos del transmisor
Conceptos básicos del transmisor:

Términos básicos de radio:
Palanca del acelerador: La palanca del acelerador cambiará la velocidad del motor.
Alerón: La palanca del alerón inducirá el balanceo del avión.


Ascensor: proporcionará control de inclinación de la aeronave.


Timón: esta palanca proporciona control de guiñada.
Canal : Estos son los números de los canales de control en su par Txr-Rxr, por ejemplo. En radio de 6 canales puedes conectar 6 servos o 6 motores o algunos motores y servos al receptor cuyo número total no excederá de 6.
Estos seis canales en el receptor están conectados a los transmisores y proporcionan una señal pwm de frecuencia de 50 Hz con un pulso de tiempo de 1 ms a 2 ms (esta misma señal se usa para accionar el servomotor).
Modo : Hay 4 modos de transmisor disponibles, a saber, Modo1, Modo2, Modo3 y Modo4.
Estos modos no son más que la colocación del control del canal de alerones, profundidad, etc. en las manijas del transmisor.

CH1= Alerón CH2= Elevador
CH3= Acelerador CH4= Timón
Señales del receptor
Señales del receptor:
El transmisor suele transmitir señales PCM o PPM que son recibidas, no dispersadas y decodificadas por el receptor y obtenemos señales PWM en canales correspondientes como los del transmisor. Estas señales PWM tienen una frecuencia de 50 Hz (período de tiempo de 20 ms) y el tiempo de activación del pulso varía de 1 ms a 2 ms.
Por ejemplo: si muevo la palanca de alerón de mi transmisor, la señal pwm en el canal 1 variará dependiendo de la posición de la palanca.
Estos pulsos significan una señal de aceleración para el motor BLDC y la posición del eje para el servomotor.
|
A tiempo |
Velocidad del motor BLDC |
Ángulo del servoeje |
|
1 milisegundo |
Aceleración mínima o nula |
0 0 |
|
1,5 milisegundos |
Medio acelerador |
90 0 |
|
2 milisegundos |
Todo gas |
180 0 |
Conectamos la señal al DSO para observar la forma de onda.
Puedes ver que la frecuencia de onda es de 45,5 Hz, el tiempo de activación en el midstick es de 1.550 ms y 1.850 ms a aproximadamente el 75%.

75% palo

Intermediario
Si ya tiene una radio, entonces debería estar familiarizado con todos los conceptos básicos anteriores y poder utilizar su radio con el UAV.
Si eres principiante te recomiendo que compres la Radio Flysky CT6B ya que es la más barata disponible y además funciona satisfactoriamente, además se puede programar en una PC y también se puede usar como simulador.
En este proyecto utilicé la radio FLYSKY CT6B .


Especificaciones:
Canales: 6 canales
Frecuencia: 2,4 GHz
Potencia de RF: menos de 20 dB
Modulación: GFSK
Tipo de código: PCM
Sensibilidad: 1024
Puerto DSC: sí
Puerto del cargador: sí
Alimentación: 12 V CC (1,5 AAA * 8)
Longitud de la hormiga: 26 mm
Certificado: CE FCC
Si puede ver, hay un total de 7 filas y 3 columnas en el receptor. Estas líneas son el canal 1, el canal 2 hasta el canal 6 y una línea adicional es para conectar la batería al receptor y también se usa para un proceso llamado vinculación.
La primera columna (la interna) proporciona las señales PWM correspondientes a la posición de la palanca en el transmisor.
2 y la columna (en el medio) es el pin de alimentación Vcc. 3 tercera columna (exterior) es el pin de tierra.
En un avión RC, el motor sin escobillas está conectado al canal 3, el servo de alerón está conectado al canal 1, los servos del timón y del elevador están conectados al canal 4 y al canal 2 respectivamente.
Pero en este proyecto no vamos a fabricar un avión RC, por lo que las conexiones se resolverán más adelante.
Lo segundo en el apartado de comunicación es la cámara FPV (Videografía en primera persona).
No los usé en este proyecto porque no teníamos el presupuesto.
sección electrónica
Sección electrónica:
Piezas de la sección electrónica:
Motor sin escobillas
servo motor
Batería
Panel de control
“ Seleccionar el motor para su UAV
Como estamos fabricando un UAV que contará con sensores IMU, se recomienda reducir las vibraciones al mínimo posible, de lo contrario habrá mucho ruido en la salida del sensor y
Obtendrá un comportamiento inesperado de su UAV. Para reducir las vibraciones es necesario
1. Monte los sensores IMU sobre materiales amortiguadores de vibraciones, como cinta adhesiva de doble cara, espaciadores de nailon, espuma, etc.
2. Reducir las vibraciones de los agentes que las causan.
Nuestro motor BLDC será el principal agente causante de vibraciones en nuestro UAV, por lo que tenemos que elegir un motor que proporcione las mínimas vibraciones.
Deberíamos elegir motores de RPM más bajas por debajo de 1000 KV para vibraciones más bajas.
Selección de motor:
Una de las partes importantes del multirotor es su motor. Es parte del sistema energético. De hecho, todo el sistema de energía depende de la selección del motor, por lo que debes tener mucho cuidado al seleccionar el motor. Utilizamos motores Brushless para multirotor. El motor sin escobillas viene con algunas especificaciones importantes. Verá estas especificaciones en la página si realiza la compra en línea. Entonces esto simplifica nuestro trabajo. Para la selección del motor, algunas especificaciones importantes son.
kV
Corriente máxima (A)
Diámetro del eje
Impulso
Peso
Lipo(3S-4S)
Soporte sugerido
Para aplicaciones multirrotor, los motores de 600-1200 kV son buenos. Por debajo de 600 kV aún mejor. Un kV bajo significa que puedes hacer girar una hélice grande. La hélice grande significa que puede mover más aire y obtendrás más empuje.
kV = RPM/V
Si tiene un motor de 600 kV y una batería 3S para suministrar energía, las RPM del motor SIN CARGA serían:
600 x 11,1 (batería 3S) = 6660 RPM.
La clasificación de corriente máxima es otro factor importante al seleccionar el motor. La selección de ESC y batería depende de este valor (lo aprenderemos más adelante). Debería poder funcionar con baterías lipo 3S y 4S. El diámetro del eje ayuda a seleccionar el adaptador del soporte. Ahora llegamos al empuje. En la mayoría de los casos, verá la cantidad de empuje que el motor puede producir con la hélice sugerida en el sitio web. Si recuerdas, aprendimos que para levantar 1000 gramos de cuadricóptero, necesitamos un total de 2000 gramos de empuje. Y el quadcopter tiene 4 motores, por lo que cada motor debe ser capaz de producir al menos 500 gramos de empuje para satisfacer nuestra necesidad.
4 motores x 500 gramos de empuje = 2.000 gramos de empuje.
Una cosa más es Watt.
Vatios = V (voltaje) x I (amperios)
A más vatios, más potencia, por lo que también debes tener esto en cuenta a la hora de seleccionar el motor.
Pero cuando se trata de seleccionar el motor, notará que hay muchas opciones disponibles para la selección del motor y es realmente confuso, entonces, ¿qué motor es mejor para aplicaciones multirotor? Bueno, hay que considerar algunas cosas más además de las especificaciones. Algunos de ellos son
Montaje del motor: Bueno, el montaje del motor es otro factor importante que debes tener en cuenta al seleccionar el motor para tu multirotor. El soporte del motor sufre fuerza de tracción, especialmente cuando se balancea una hélice grande y si el motor no está asentado correctamente, puede soltarse en vuelo y estoy seguro de que nadie quiere que sucedan estas cosas. Por lo tanto, asegúrese de que el motor que está comprando tenga un buen soporte que pueda sostenerlo adecuadamente bajo cargas pesadas y que, además, pueda colocar este soporte fácilmente en el bastidor. Sin embargo, siempre debe comprobar antes de volar que todas las conexiones y sujetadores estén correctamente instalados. Obtenga un motor de repuesto. Espero haber cubierto todo lo relacionado con la selección del motor”.
-Créditos
Dharmik
www.rcindia.org
El motor que utilicé para este proyecto es

RPM/V: 1120 Kv
Vatios máximos (W): 336
Corriente máxima (A): 23,2
Diámetro del eje (mm): 4,0
Peso (gramos): 70
Tamaño del motor (mm): ?28*36
Ri ( ?): 0,070
Esc sugerido: 30 amperios
Li-Po: 2-4 celdas
Empuje: 1130g
Necesitará 2 motores ya que estamos diseñando un UAV de doble rotor.
Cuando pedí el motor anterior y después de que no pudimos volar con éxito el UAV en 2 proyectos, fue durante el tercer proyecto que nos dimos cuenta de que uno de los motores estaba un poco defectuoso, la lata giratoria del motor tocaba la base cuando estaba en la configuración de empuje, así que lo fijamos a la parte superior para que ahora tirara y el problema de fricción desapareciera.
No te recomendaría el mismo motor porque no es de marca.
Considere el empuje proporcionado por el motor al seleccionar.
Al seleccionar un motor, debe seleccionar uno de marca con buena calidad de construcción.
Si compra los componentes en Hobbyking.com u otras tiendas, hay reseñas en la misma página sobre los productos, por lo que al seleccionar el motor, lea las reseñas y no compre aquellos cuyos clientes afirmen tener rodamientos defectuosos o mala calidad de construcción. .
Los motores de la marca Turnigy son algunos de los mejores disponibles; Estoy usando el Turnigy Park 450 en mi avión RC y, como dije antes, no podía volar un avión RC, lo estrellé muchas, tantas veces, pero aún así el motor de estacionamiento funciona perfectamente.
Por eso te sugiero que compres un motor de buena calidad con más de 1 kg de empuje para este proyecto.
Adaptadores de soporte
Adaptadores de soporte:
Se parece a esto:

Para conectar la hélice al eje del motor, necesitamos algo llamado adaptador de hélice.
Adjunto al motor así:

Y la hélice se arregla así:

Controlador de velocidad electrónico
Controlador de velocidad electrónico
Como dije, los motores sin escobillas no tienen escobillas, necesitan circuitos externos para pasar la corriente a través de ellos, ESC es ese circuito.
Los ESC toman voltaje CC y lo convierten en voltaje CA trifásico.
Los ESC se clasifican según la corriente que pueden manejar, como 10 A ESC, 20 A ESC, etc. Utilicé 30A ESC para mi motor. Cuando seleccione su motor, probablemente le indicarán en la página del producto qué ESC debe usar.
La clasificación se escribiría como 20-30A, 30-35A, en este caso el primer número es la corriente continua que su ESC puede manejar y el segundo número es la corriente de ruptura. Entonces, si digo que necesitamos 30A ESC, entonces primero el número debería ser 30
O puede ver el consumo máximo de amperios de su motor en la página del producto y seleccionar ESC cuya corriente es 1,5 veces la corriente máxima del motor o al menos 5 amperios más que la corriente máxima.
Esto asegurará que no fríes tu ESC si el motor está ligeramente sobrecargado.
Guía de conexión básica:

Consulte la imagen de arriba, el ESC recibe el voltaje CC de la batería y de acuerdo con las señales que reciben del receptor (recuerde la señal PWM), cambian la frecuencia de conmutación de las señales CA trifásicas de salida, cambiando así la velocidad. del motor BLDC.
Puedes conectar los tres cables ESC a los cables BLDC de cualquier forma, sin una polaridad específica.
Sin embargo, después de conectar su motor al ESC, si su motor gira en la dirección inversa de la dirección deseada, intercambie 2 cables cualesquiera de estos tres cables para cambiar la dirección del motor.
ESC que usé: Redbrick 30A ESC
Especificaciones:

Amperios máximos: 30A
Ubec: 5v/2A
Células: lipólisis 2~3s
Tamaño: 52 mm x 14 mm x 25 mm
Peso: 22 g (cables incluidos)
Necesitaremos 2 ESC ya que usamos 2 motores BLDC.
Especificaciones del servomotor :
 Longitud del cable: 18 cm
Longitud del cable: 18 cm
Peso: 44 gramos
A 4,5 V
Velocidad (seg/60): 0,08
Par (kg-cm): 2,0
A 6V
Velocidad (seg/60): 0,07
Par (kg-cm): 2,2
Necesitamos 2 servos para nuestras dos superficies de control, es decir, cabeceo y balanceo.
Hélices
Hélices:
"HÉLICE
Siempre descuidamos esta parte de plástico. ¿Solo porque es barato? ¡¡Quien sabe!! Pero en aplicaciones multirrotor el aporte de la hélice es notable. Las especificaciones del soporte son fáciles de entender y son diámetro y paso. El tipo de hélice también es importante, pero veremos el efecto del diámetro y el paso en el vuelo multirotor. Generalmente vemos accesorios con la especificación de
7×3.5
8×4.5
9×5
10×3.8
10×4,5
10×6
11×4.7
12×3.8
El primer valor es el diámetro del soporte y el segundo valor es el paso. Ambos están en pulgadas.
Diámetro: Círculo virtual que genera el soporte/o longitud total del soporte.
Paso: Número de viajes por revolución.
Como podemos ver arriba, nuestro motor funciona a 6.660 RPM sin carga. Pero cuando monte el soporte, las RPM se reducirán. Aquí tomaremos el ejemplo de dos accesorios de 10×3,8 y 10×6. Cuando monte un soporte de 10 pulgadas de diámetro, las RPM del motor se reducirán a 3600 RPM (revoluciones por minuto).
60 revoluciones por segundo.
Nuestro primer soporte tiene un paso de 3,8 pulgadas. Es decir, por revolución viajará 3,8 pulgadas. Entonces
60 x 3,8 = 228 pulgadas/seg = 5,7 m/seg
Para el segundo soporte tiene un paso de 6 pulgadas.
60 x 6 = 360 pulgadas/seg = 9,1 m/seg
Por tanto, podemos decir que si tenemos una hélice de 10×3,8 nuestro quad se elevará en el aire a 5,7 m/s, mientras que con una hélice de 10×6 el ritmo de subida aumentará hasta los 9,1 m/s.
Un soporte de mayor diámetro puede producir más empuje.
Entonces, ¿qué hélice es mejor para nuestro multirotor?
Generalmente obtendrás el valor sugerido en las especificaciones del motor, por lo que debes seguir adelante y comprar 1 o 2 pares adicionales. Pero, ¿qué pasa si no se proporciona el valor de la propuesta? Verás una especie de tabla con diferentes accesorios, Voltios, Amp, Boost y Eficiencia. Aquí tendrás que probar el método de prueba y error. Pero eso no significa que deba girar la hélice de 13 × 3,8 en el motor de 1700 kV.
El motor de menor kV puede manejar hélices más grandes. Al aumentar el valor de kV, el tamaño de la hélice disminuirá. Así que tendrás que tenerlo en cuenta. Para multirrotor, debes utilizar una hélice de paso bajo si necesitas más estabilidad y menos vibraciones. ¿Cómo equilibrar el apoyo? Lo veremos en la siguiente parte”.
-Créditos
Dharmik
Rcindia.org
Selección de accesorios
En este proyecto utilicé una hélice de 2 palas de 10×4,5, así como una hélice de 3 palas de 10×6.

Y recuerda que tienes que comprar un par de estos soportes, es decir, un soporte debe estar en el sentido de las agujas del reloj y el otro en el sentido contrario a las agujas del reloj.
En la foto de arriba puedes ver pequeños anillos, se conocen como anillos adaptadores de hélice, se insertan en la hélice para que quepan todos los tamaños de adaptadores de hélice.
¿Por qué emparejar?
Como verás, montaremos los dos motores de forma coaxial, uno debajo del otro.
Un motor girará en el sentido de las agujas del reloj, induciendo así un par contrario en el sentido contrario a las agujas del reloj. Si no anulamos este contrapar, en cuanto nuestro UAV despegue, empezará a girar en sentido antihorario.
Esta es la razón por la que hay un segundo ventilador en la cola del helicóptero, para anular el contrapar.
En nuestro UAV no hay ventilador de cola, por lo que montaremos otro motor y lo giraremos en sentido contrario a las agujas del reloj para que el par inducido sea en el sentido de las agujas del reloj, de modo que si el par inducido por ambos motores es igual, se cancelarán entre sí y el UAV quedará estable, esto se llama control de guiñada. Además, obtendremos más empuje que usando un solo motor.
Baterías de polímero de litio
Baterías de polímero de litio
Voltaje y recuento de celdas:
Las baterías de polímero de litio utilizan un conjunto de celdas de polímero de litio.
Cada celda tiene un voltaje nominal de 3,7 V, un voltaje completamente cargado de 4,2 V y un voltaje mínimo de 3,0 V.
Si conectamos dos celdas en serie obtendremos un Lipo Pack de 7.2V y el pack se conocería como pack 2S.
Del mismo modo, el voltaje del paquete 3s sería de 11,1V.
Al cargar debes utilizar un cargador hecho especialmente para baterías lipo.
Clasificación C.
La rapidez con la que se puede descargar una batería es su capacidad máxima de corriente. La corriente suele ser de C para la batería. C es el tiempo que tarda en descargarse la batería en fracciones de hora. Por ejemplo, 1 C descarga la batería en 1/1 hora o 1 hora. 2 C descarga la batería en ½ o media hora. Todas las baterías RC están clasificadas en mili amperios hora. Si una batería tiene una capacidad de 2000 mAh y la descargas a 2000 mA (o 2 amperios, 1 amperio = 1000 mA), se descargará completamente en una hora. Por tanto, la clasificación C de la batería se basa en su capacidad. Una celda de 2000 mAh descargada a 2 amperios se descarga a 1 C (2000 mA x 1), una celda de 2000 mAh descargada a 6 amperios se descarga a 3 C (2000 mA x 3).
Todas las baterías tienen limitaciones en cuanto a la rapidez con la que se pueden descargar. Debido a esto, muchas baterías LiPoly se colocan en paralelo para aumentar la capacidad actual de la batería. Cuando se conectan 2 baterías positivo con positivo y negativo con negativo, se vuelven como una batería con el doble de capacidad. Si tienes 2 celdas de 2000 mAh y las conectas en paralelo, el resultado será el mismo que con 1 celda de 4000 mAh. Esta celda de 4000 mAh tiene la misma clasificación C que las celdas originales de 2000 mAh. Entonces, si las celdas de 2000 mAh pueden descargarse a un máximo de 5 C, o 10 amperios, entonces la nueva celda de 4000 mAh también puede descargarse a 5 C, o (4000 mA x 5) 20 amperios. Este método de construcción de baterías nos permite utilizar baterías LiPoly a corrientes más altas que las que podrían producir las celdas individuales. La convención de nomenclatura que permite descifrar cuántas celdas hay en paralelo y cuántas en serie es el método XSXP. El número delante de la S representa la cantidad de celdas en serie en el paquete, por lo que 3S significa que es un paquete de 3 celdas. El número delante de P significa el número de celdas en paralelo. Por lo tanto, un paquete 3S4P de celdas de 2100 mAh tiene un total de 12 celdas en su interior. Tendrá el voltaje de cualquier otro paquete 3S, ya que el número de celdas en serie determina el voltaje. Tendrá un manejo actual de 4 veces la calificación C máxima de las 12 celdas individuales. Entonces digamos que nuestro paquete 3S4P tenía una descarga máxima de 6C. Esto significa que tiene un voltaje nominal de 10,8 voltios (3×3,6) y una velocidad de descarga máxima de 50,4 amperios (2100mAh x 6Cx4P).
Selección de batería LiPo:
A la hora de seleccionar baterías LiPo, debemos tener en cuenta la cantidad de corriente que extraeremos de la batería.
El motor que utilicé debería consumir 23,2 A de corriente y como estamos usando 2 motores, la corriente total consumida sería 23,2 x 2 = 46,4A.
Por tanto, la corriente consumida sería superior a 46,4A, considerando también la corriente consumida por los servomotores.
Batería de alta mAh, mayor tiempo de vuelo
Alta calificación C, mayor tasa de descarga.
Además, en ocasiones el rating escrito en la batería no es cierto y es inferior al que está escrito, por lo que no debemos seleccionar ratings marginales y debemos optar por un poco más.
Ej: al principio usábamos una batería Turnigy 2200mAh 25-30C que debería permitir una velocidad de descarga de 2200 x 25=55A, pero aun así, después de algunos vuelos notamos que la batería se hinchaba un poco y con cada prueba que pasaba la batería estaba quemándose y finalmente la capacidad de la batería se redujo hasta el punto de que nuestro UAV ya no despegaba.
Por tanto, tenga especial cuidado a la hora de seleccionar la batería ya que es la principal fuente de energía y además es cara.
Tampoco utilice pilas que pesen más de 300 gramos.
Entonces, después de arruinar nuestra primera batería, compramos esta:
Especificaciones:

Capacidad: 3300mAh
Voltaje: 11,1 V
Tasa de descarga continua: 25°C
Velocidad máxima de explosión: 50°C
Configuración: 3S1P
Tasa de carga: 1C
Tamaño: (Al) 20 mm * (An) 44 mm * (An) 135 mm
Peso: 247 g
Color PVC: Azul
Conector: XT60
Tablero de control de vuelo
Tablero de control de vuelo:
El componente más importante de un multirotor es la placa controladora de vuelo.
La placa de control de vuelo dispone de sensores IMU con un microcontrolador para realizar tareas de control.
Ahora bien, ¿qué controla esto?
Un avión VTOL debe ser estable en 3 ejes, es decir, los ejes de cabeceo, balanceo y guiñada, para que pueda flotar en el aire. Los sensores IMU detectan la orientación de la aeronave y envían los datos al microcontrolador, el microcontrolador procesa los datos sin procesar para estimar los ángulos y proporciona compensación de errores para devolver la aeronave a su posición inicial.
Y lo hace con una velocidad y precisión increíbles, por lo que necesitamos un controlador para los UAV VTOL.
Existen muchos tableros de control multirotor como APM, Openpilot mega, multiwii, kk multicopter, etc.
Usé debajo de dos:
placa HK v3

Especificaciones:
Tamaño: 50,5 mm x 50,5 mm x 23,5 mm
Peso: 14,5 gramos
IC: Atmega328PA
Giroscopio: Murata Piezo
Voltaje de entrada: 3,3-5,5 V
Señal del receptor: 1520us (4 canales)
Señal para ESC: 1520us
Características:
1. Controlador Atmega 328.
El microcontrolador utilizado es el controlador avr atmega 328 de 8 bits.
dos. Temporizadores de 16 bits en AVR.
3. 3-DOF, solo sensores giroscópicos.
El sensor giroscopio es un sensor IMU y detecta la velocidad angular cuando el UAV está inclinado. Lea también sobre el sensor de inclinación
4. Giroscopio piezoeléctrico Murata analógico
Los sensores giroscópicos utilizados son unos giroscopios piezoeléctricos murata baratos, no muy sensibles.
5. Configuración de ganancias de PI mediante potenciómetros incorporados.
El tablero de control tiene 3 potenciómetros integrados para cambiar la ganancia P e I del controlador PID utilizado en el software. Estas ganancias definen cuántos grados de inclinación del UAV debe inclinar la superficie de control.
6. Puede admitir hasta 6 UAV de rotor
También podemos hacer quadcopter (4 rotores) o hexcopter (6 rotores) usando esta placa.
7. Sin autonivelación.
Dado que los giroscopios miden la velocidad angular, no conocen la orientación real del avión, lo único que hacen es intentar evitar la inclinación del UAV.
8. Estimación de ángulo: solo giroscopio
9. Sin AHRS ni fusión de sensores.
AHRS y la fusión de sensores son algunas técnicas avanzadas que proporcionan una estimación de ángulos muy precisa y control de UAV, pero no se emplean en este foro.
10. Sin cardán de cámara
No tiene cardán de cámara para estabilizar la cámara durante el vuelo.
11. Menos sujeto a vibraciones.
Un mérito es que es menos propenso a las vibraciones debido a los giroscopios murata baratos.
dos) tablero KK2.0

Especificaciones:
Tamaño: 50,5 mm x 50,5 mm x 12 mm
Peso: 21 gramos (timbre Piezo Inc)
IC: Atmega324PA
Giroscopio: InvenSense Inc.
Acelerómetro: Anologue Devices Inc.
Nivel automático: Sí
Voltaje de entrada: 4,8-6,0 V
Interfaz AVR: estándar de 6 pines.
Señal del receptor: 1520us (5 canales)
Características:
1. Controlador Atmega 324.
Esta placa utiliza el controlador atmega 324 avr, tiene más UART y SPI que el atmega 328.
dos. Temporizadores de 16 bits en AVR.
3. 6-DOF, giroscopio de 3 ejes y acelerómetro.
La adición más sorprendente en esta versión de la placa es un acelerómetro, lo que la convierte en una placa IMU de 6 DOF.
4. Sensores digitales MEMS ultrasensibles.
A diferencia de los giroscopios Murata anteriores, esta placa utiliza giroscopios y acelerómetros MEMS más sensibles.
5. Configuración de ganancias de PI mediante la interfaz de usuario LCD.
Otra sorprendente adición a esta placa es la interfaz de usuario LCD que facilita la configuración y también el ajuste de las ganancias PI, ya no es necesario escribir firmware en esta placa, lo único que tenemos que hacer es seleccionar el tipo de UAV y volar.
6. Puede admitir hasta 8 UAV de rotor.
Sí, podemos hacer un octocóptero con esta placa.
7. Capaz de autonivelarse
Dado que los acelerómetros pueden determinar la orientación del UAV en el espacio, ahora es posible tener la función de autonivelación en esta placa.
8. Estimación de ángulos: giroscopio y acelerómetro.
Utiliza técnicas de fusión de sensores para estimar ángulos utilizando datos de acelerómetro y giroscopio, lo que aumenta la precisión y proporciona una mejor función de autonivelación.
9. Utiliza AHRS Algo y Sensor Fusion para una estimación precisa del ángulo
Utiliza un Sistema de Referencia de Actitud y Rumbo, el que se utiliza en aviones y cohetes, y es el sistema más eficiente para vehículos aéreos no tripulados. También estima los ángulos de Euler, que es una técnica para representar un cuerpo en el espacio.
10. cardán de cámara
También podemos conectar la cámara a un gimbal para obtener fotografías aéreas estables.
11. Más propenso a las vibraciones.
Como utiliza sensores IMU de alta sensibilidad, también es muy sensible a las vibraciones.
Usaremos la placa kk2.0 ya que intenté usar la placa HK v3.0 sin suerte.
Diagrama de conexión:

Más sobre cómo armar todo y configurar el tablero para que funcione para nosotros después de la sección del modelo de avión.
Sección de aeromodelismo
Sección de aeromodelismo:
Usamos depron y listones de madera para construir nuestro marco.
Puedes hacer tu propio diseño utilizando el material que quieras, pero intenta que sea lo más ligero posible.
El peso de nuestros UAV es de 1200 gramos.
A continuación se muestran fotografías que le darán una buena idea sobre la construcción del marco.

Figura : Completo
Puedes ver la cinta de papel en la hélice, sirve para equilibrar las hélices.

Figura : Vista superior

Figura : Superficie de control

Figura : Tablero FC

Figura: Conexión a la superficie de control

Figura : fondo
Construcción de la estructura exterior y montaje del motor.
Estructura exterior del edificio.
La parte circular negra es una lámina de depron pegada formando un círculo de 32 cm de diámetro,
Tiene 4 pilares de madera de 29 cm de alto en su circunferencia como se muestra en las imágenes a continuación.


soporte motor
Hicimos un soporte + para el motor, como el soporte del motor tiene 4 tornillos, debes apretar todos los tornillos para evitar vibraciones. Además, debido a las vibraciones, la tuerca puede comenzar a aflojarse y caerse, así que apriete los tornillos al revés, es decir, con la tuerca arriba.

Figura : Soporte del motor

Figura : ESC
Ambos ESC están en el soporte asegurados con cinta de papel; puede cambiar la posición de los ESC para equilibrar el peso del UAV al final si parece desequilibrado.
Para nosotros, la posición anterior funcionó bien.
Servo y conexiones
Servidor
Los servos se utilizan para mover la superficie de control; Tenemos dos superficies de control, por lo que se necesitarán dos servos.
Tenga en cuenta la posición de los servos en el UAV, la posición.

Seleccione también con cuidado el diámetro del cilindro de soporte y de desplazamiento, de lo contrario la holgura entre la hélice y el servo sería muy pequeña.

Conexiones
Para transferir el desplazamiento angular del eje de control a las superficies de control necesitaremos las conexiones.
Los enlaces primero convertirán el desplazamiento circular del servoeje en desplazamiento lineal y luego nuevamente en desplazamiento angular de la superficie de control.
Por lo tanto, conectamos la varilla de conexión mediante bisagras a la bocina del servo y al eje de la superficie de control.

Puede diseñar un enlace si desea diferentes superficies de control y deflexión del servo.
Aquí está la fórmula para calcular esto:

Puedes ver xey en la imagen de arriba. q x es la desviación del ángulo de la superficie de control y q y es la desviación del ángulo de la bocina del servo.
Si desea una alta desviación de la superficie de control para una baja desviación de la bocina del servo, seleccione x
En nuestro caso seleccionamos x=y=1.5 entonces nuestro q x = q u.
Seleccione x>y si tiene un servo de alto torque pero de baja velocidad e y>x si tiene un servo de bajo torque pero de alta velocidad.
Diseño de la superficie de control.
Diseño de la superficie de control.
Puede utilizar la siguiente fórmula para calcular la longitud (ancho) de la cuerda de la superficie de control para un par de servo determinado o viceversa.
El modelo matemático: “t = (AMPC2LV2) / (4RT)” donde:
t = servopar
A = pecado(S) * tan(S) / tan(s)
S = ángulo de la superficie de control en relación con el neutro
s = ángulo del brazo del servo en relación con el punto muerto
M = peso molecular del aire (~28,6 g/mol)
P = presión del aire (1 atm)
C = longitud promedio de la cuerda de la superficie de control
L = longitud promedio de la superficie de control
V = velocidad del aire
T = temperatura del aire (~290 K)
R = constante del gas ideal (82,056 atm cm3/mol K)
O utilice nuestro diseño:

En la imagen CAD a continuación tendrás una mejor idea de la forma de la superficie de control.


Hicimos una superficie de control con coroplasto e insertamos finas varillas de metal y las pegamos con bondtite.
Un lado tendrá un tope como se indicó anteriormente y el otro lado estará conectado al servo mediante un enlace como ya se explicó.

La holgura entre el motor inferior y la superficie de control es de 1 cm.
De manera similar, hay un espacio de 1,5 cm entre el motor y el conjunto de la placa FC, como se muestra a continuación.

La longitud de la superficie de control que utilizamos es de 30 cm. y la altura de esta superficie de control es de 5,5 cm.
El corte angular entre la superficie de control de rotación e inclinación es de 45 0 por lo que no debe haber ningún tipo de contacto entre las dos superficies de control.

Diseño de montaje en placa FC
Diseño de montaje en placa FC
El soporte de la tarjeta FC se atornilla a 1,5 cm por encima del motor superior. El soporte es una tira rectangular de madera que sostiene la batería Lipo y la placa FC.
La tira de madera debe fijarse de forma segura para que haya mínimas vibraciones.
Al ver la imagen a continuación podrá comprenderlo más claramente.



Como puede ver el FC está montado sobre un trozo de espuma y espaciadores de nailon para
para amortiguar las vibraciones.
Puedes utilizar cinta adhesiva de doble cara o el embalaje con el que viene el kk2 también es una buena opción.
Conexiones

El diagrama de arriba muestra claramente las conexiones que debe realizar.
Tenga en cuenta los pines de señal en el receptor y la placa FC y conéctelos en consecuencia, para los pines de salida, es decir, motores y servos, generalmente el cable naranja o blanco es el pin de señal, así que conéctelo con cuidado o dañará la placa y el receptor.
Como puede ver, las columnas central y exterior son vcc y gnd respectivamente y todos los pines de la misma columna están conectados entre sí, excepto los pines de señal y los pines superiores del motor.
Configuración de vehículos aéreos no tripulados
Configuración de vehículos aéreos no tripulados
Una vez que tengas todo armado, sigue los pasos para configurar y volar tu UAV.
Encienda la alimentación y presione el botón de menú e ingrese al submenú "Prueba del receptor".
Mueva cada canal en su transmisor y verifique que la dirección mostrada coincida con los movimientos de la palanca. Si no están de acuerdo, cambie el canal de su transmisor.
Utilice los ajustes o subajustes y ajuste a cero los valores de los canales que se muestran en la pantalla LCD.
Ingrese al submenú "Load Motor Layout" y elija la primera opción, es decir, ' SINGLE-COPTER 2M 2S' .
Ingrese al submenú “Mostrar diseño del motor” y confirme lo siguiente.
El primero es el motor en dirección CW.
2 y también es un motor, pero en sentido antihorario
3 tercios es rodillo servo
El cuarto es el servo de paso.
Ingrese al submenú "Editor PI" y verifique los valores correctos de ganancia PI. Utilice valores válidos conocidos o los predeterminados.
Usamos estos valores
Eje de rotación/inclinación:
Ganancia = 246
Plímite = 100
De nuevo = 25
Ilimitado = 20
Eje de guiñada:
Ganancia = 281
Plímite = 31
Una vez más = 0
Ilimitado = 0
Ahora puedes montar las hélices y probarlas.
Primero active el nivel personal dando "Timón derecho y aceleración cero" junto con "Alerón derecho" .
Ahora armelo con timón derecho y aceleración cero durante unos segundos. Sonará un pitido y el LED se encenderá. No lo armes antes de colocar el UAV en el suelo y alejarlo 5 metros.
Desármelo después del aterrizaje manteniendo el timón hacia la izquierda sin aceleración. Sonará un pitido y el LED se apagará.
Aumente la ganancia I de Rollo y Cabeceo (tenga en cuenta la diferencia en la ganancia P) hasta que vuele hacia adelante sin subir ni bajar.
Active la autonivelación manteniendo presionado el alerón derecho mientras lo arma o desarma. Apáguelo sosteniendo el alerón izquierdo.
Descripciones de submenús.
“Editor PI”:
Ajuste aquí la configuración de ganancia PI. Utilice los botones ANTERIOR y SIGUIENTE para resaltar el parámetro que desea cambiar y presione el botón CAMBIAR. Para ajustar Roll y Pitch al mismo tiempo, consulte el submenú "Configuración de modo".
“Prueba del receptor”:
Para comprobar la salida del receptor.
“Configuración de modo”:
Elemento “Autonivelante”: Cómo se controlará la función de autonivelación:
“Stick”: Activa la autonivelación manteniendo el alerón hacia la derecha al armar o desarmar. Apágalo con el alerón izquierdo.
“AUX”: El canal del interruptor AUX controla la función de autonivelación.
Ítem “Yo parte de PI”: Cómo se controlará la función de mantenimiento de rumbo:
“Encendido”: Siempre encendido.
“AUX”: El canal del interruptor AUX controla la función de mantenimiento del rumbo.
Elemento “Arm”: Cómo se controlará la función de mantenimiento de rumbo:
“Stick”: brazo con timón derecho y aceleración cero. Desarmar con timón izquierdo y aceleración cero.
“Encendido”: Siempre encendido. Cuidado con este. Úselo sólo cuando el FC no controle ningún motor, por ejemplo cuando lo use para estabilizar aviones.
Elemento “Enlace Roll Pitch”:
“On”: edita los parámetros de ganancia Roll y Pitch juntos.
“Off”: edita los parámetros de ganancia Roll y Pitch por separado. Úselo cuando el multicóptero tenga diferente masa inercial en diferentes ejes.
“Escala de bastón”:
Aquí podrás ajustar la respuesta del stick a tu gusto. Un número mayor da una respuesta mayor.
Similar al punto final o al ajuste de volumen de su transmisor. También puedes ajustar tu
transmisor para ajustar la respuesta de la palanca y use la escala de la palanca si desea aún más respuesta.
"Varios. Ajustes":
Elemento “Aceleración mínima”: ajuste lo suficiente para mantener todos los motores en funcionamiento cuando la aceleración sea superior a cero.
Elemento “Contraste LCD”: Ajusta el contraste de la pantalla LCD.
“Configuración de nivel automático”:
Artículo “Ganancia de autonivelación”: El poder de la autonivelación. Un número mayor es más fuerte.
Elemento “Límite de autonivelación”: Limita la potencia máxima de autonivelación. Un número más alto es un límite más alto.
“Prueba de sensores”: Muestra la salida de los sensores. Vea si todo muestra "OK". Mueve el FC y mira si los números cambian.
“Calibración Acc”: Siga las instrucciones en la pantalla LCD. La calibración solo es necesaria una vez por configuración inicial.
“Calibración ESC”:
Instrucciones:
1: Importante: ¡¡QUITAR LAS HÉLICES O DESCONECTAR UN CABLE DEL MOTOR!!
2: Apague la alimentación del FC.
3: Enciende el transmisor y ajusta el acelerador al máximo.
4: Presione los botones 1 y 4 y continúe presionando hasta el último paso. Al soltar los botones se cancela la calibración.
5: enciende FC
6: Espere a que el ESC emita un pitido calibrado de aceleración máxima. Tarda unos segundos, dependiendo del ESC.
7: Baje el acelerador a ralentí.
8: Espere la señal calibrada del acelerador en ralentí.
9: Suelta los botones.
“Mostrar diseño del motor”:
Muestra la configuración gráficamente. Úselo para verificar su construcción y/o su mesa mezcladora personalizada.
“Cargar diseño del motor”:
Carga una de las muchas configuraciones fijas. La configuración cargada se puede modificar más tarde. Elegimos un solo helicóptero de 2m 2s.
GUÍA DE AJUSTE:
1: Asegúrese de que el KK2 lea los puntos neutrales de la palanca del transmisor. Vaya al menú "Prueba del receptor" y utilice los ajustes para restablecer los valores.
2: Vaya al menú "Editor PI" y establezca P en 150 y I en cero para los ejes Roll y Pitch. Solo necesita editar el eje de rotación, el eje de inclinación cambiará automáticamente a los mismos valores que el eje de rotación. Deje el límite P y el límite I solos, rara vez es necesario cambiarlos.
3: Pase el avión y cambie las ganancias como se muestra a continuación.
Ganancia de balanceo/cabeceo
Aumente la ganancia p gradualmente y vea la respuesta en cada vuelo, si oscila rápidamente entonces significa que la ganancia P es demasiado alta, así que disminuya un poco hasta que desaparezcan las oscilaciones.
ganancia de guiñada
Aumente las ganancias de guiñada hasta que escuche sonidos oscilantes de su motor o su UAV gane o pierda altitud.
Puedes probar estos
Eje de rotación/inclinación:
Ganancia = 246
Plímite = 100
De nuevo = 25
Ilimitado = 20
Eje de guiñada:
Ganancia = 281
Plímite = 31
Una vez más = 0
Ilimitado = 0
Tenga en cuenta que es posible que estas configuraciones no funcionen para usted, por lo que tendrá que encontrar las suyas propias mediante prueba y error.
vídeos
vídeos
Código fuente del proyecto