Un tacómetro es un dispositivo que se utiliza para medir la velocidad de rotación de cualquier dispositivo. Usando la propiedad de lectura de voltaje analógico de un Arduino, esto se puede implementar fácilmente usando las piezas apropiadas. Los tacómetros tienen una variedad de aplicaciones, incluida la medición de la velocidad de los motores de CC para garantizar que funcionen dentro de las especificaciones.

Fig. 1: Prototipo de tacómetro digital basado en Arduino

Fig. 2: Imagen de la placa del microcontrolador Arduino

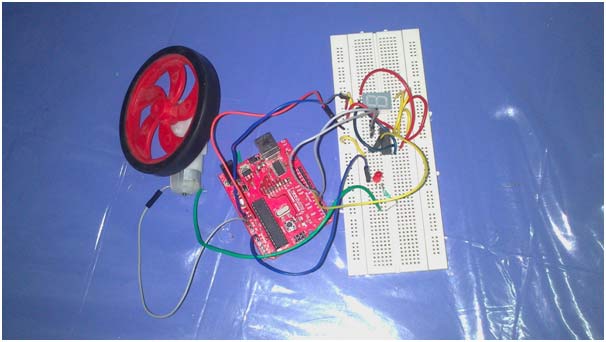
Fig. 3: Imagen del circuito del tacómetro en la placa de pruebas.
Componentes necesarios:
- Placa Arduino con microcontrolador ATmega32
- Cualquier motor DC (preferiblemente operado por batería)
- rueda motorizada
- Resistor
- Potenciómetro
- Pantalla de siete segmentos
- Cables de puente
- IC7447
- CONDUJO
Principio de funcionamiento.
· Para hacer un tacómetro , tendremos que convertir la velocidad de rotación a un formato legible. La única forma en que Arduino puede leerlo es en términos de voltaje eléctrico.
· Es bien sabido que si se suministra voltaje a un motor, la rueda del motor girará, cuya velocidad está determinada por la cantidad de voltaje suministrado. Sin embargo, lo contrario también es cierto, lo que significa que si hacemos funcionar el motor solo, podemos obtener voltaje en ambos extremos de los terminales del motor.
Este voltaje se puede alimentar al Arduino y el Arduino puede calcular la velocidad de rotación dependiendo de la cantidad de voltaje que se alimentó al motor giratorio.
Procedimiento y pautas
Procedimiento y pautas
- El diagrama del circuito se muestra en las pestañas del diagrama del circuito. Diagrama de circuito 1: diagrama de circuito sin usar el controlador IC y Diagrama de circuito 2: diagrama de circuito usando el controlador de pantalla de 7 segmentos IC7447.
- El motor está conectado a una resistencia y un diodo LED. La resistencia se utiliza para evitar el exceso de corriente que normalmente dañaría el Arduino. El LED se utiliza para indicar cuando el motor está en marcha y también para evitar el funcionamiento inverso.
- Como nos quedan tantos pines del Arduino, podemos conectarlos directamente a la pantalla de 7 segmentos. Alternativamente, podríamos usar un controlador de pantalla de siete segmentos, lo que reduciría la cantidad de pines utilizados y también facilitaría la implementación en términos del proceso de codificación.
- Una vez que se enciende el motor, se suministrará un voltaje positivo al pin analógico de arduino.
- El Arduino procesará la lectura analógica. Como usamos una pantalla de siete segmentos, podemos tener 10 valores, es decir, de 0 a 9. Podemos programar el arduino para dividir la lectura analógica obtenida en 9 divisiones que darán la salida requerida de 0 a 9 en la pantalla de siete segmentos. .
- Si se utiliza el IC7447, se agrega un paso más en el que los valores del 1 al 9 se convierten a sus equivalentes binarios antes de pasarlos a los pines apropiados del IC.
- En caso de que se utilice una placa perforada, debe tener cuidado de no soldar el IC en sí, sino un soporte del IC.
- Como precaución, siempre pruebe primero el voltaje del motor. Esto se puede hacer conectando un multímetro a los dos terminales del motor y girando el motor manualmente. Si la lectura de voltaje es superior a 12 V, no se debe utilizar el motor ya que existe la posibilidad de dañar la placa Arduino.
- Si desea ajustar la sensibilidad del instrumento, puede utilizar un potenciómetro en lugar de la resistencia. Cuanto menor sea la resistencia, mayor será la sensibilidad.
Código fuente del proyecto
###
intervalo=0; intbinVal; configuración vacía { Serie.begin(9600); //configuración en serie pinMode(3,SALIDA); pinMode(4,SALIDA); pinMode(5,SALIDA); pinMode(6,SALIDA); modopin(A2,ENTRADA); } bucle vacío { val = lectura analógica(A2); // lee el pin de entrada Serie.println(val); // valor de depuración binVal=val/1024*9; cambiar(binVal){ caso 0: escritura digital(3,BAJO); escritura digital(4,BAJO); escritura digital(5,BAJO); escritura digital(6,BAJO); romper; caso 1: escritura digital (3, ALTO); escritura digital(4,BAJO); escritura digital(5,BAJO); escritura digital(6,BAJO); romper; caso 2: escritura digital(3,BAJO); escritura digital (4, ALTO); escritura digital(5,BAJO); escritura digital(6,BAJO); romper; caso 3: escritura digital (3, ALTO); escritura digital (4, ALTO); escritura digital(5,BAJO); escritura digital(6,BAJO); romper; caso 4: escritura digital(3,BAJO); escritura digital(4,BAJO); escritura digital (5, ALTO); escritura digital(6,BAJO); romper; caso 5: escritura digital (3, ALTO); escritura digital(4,BAJO); escritura digital (5, ALTO); escritura digital(6,BAJO); romper; caso 6: escritura digital(3,BAJO); escritura digital (4, ALTO); escritura digital (5, ALTO); escritura digital(6,BAJO); romper; caso 7: escritura digital (3, ALTO); escritura digital (4, ALTO); escritura digital (5, ALTO); escritura digital(6,BAJO); romper; caso 8: escritura digital(3,BAJO); escritura digital(4,BAJO); escritura digital(5,BAJO); escritura digital (6, ALTO); romper; caso 9: escritura digital (3, ALTO); escritura digital(4,BAJO); escritura digital(5,BAJO); escritura digital (6, ALTO); romper; por defecto: romper; } }###
Diagramas de circuito
| Diagrama de circuito del tacómetro digital basado en Arduino |  |
| Diagrama de circuito: tacómetro digital basado en Arduino_0 |  |