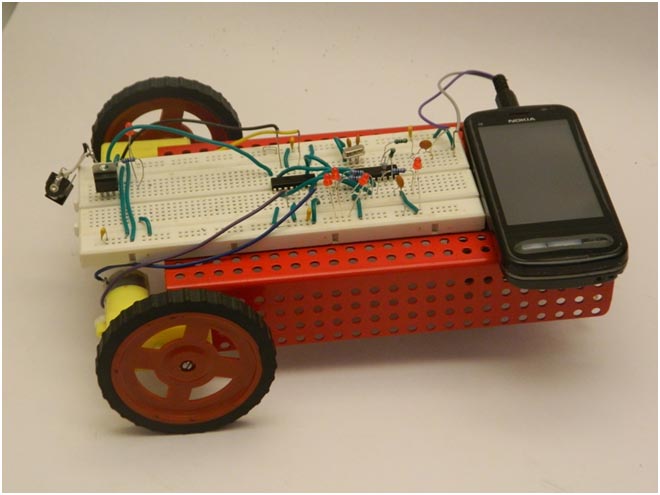
El robot operado por móvil es un robot cuyo movimiento se puede controlar presionando el número de teléfono móvil. El robot puede moverse hacia adelante, hacia atrás, hacia la derecha o hacia la izquierda dependiendo de los números que estés presionando. La propiedad del robot de operar por teléfono celular le ayuda a operar el robot desde cierta distancia. El robot controlado por teléfono móvil utiliza el módulo DTMF (dual tone-multifrequency). Es capaz de recibir un conjunto de comandos (instrucciones) en forma de tonos DTMF (Dual Tone Multiple Frequency) y realizar las acciones necesarias. El robot se controla realizando llamadas al teléfono móvil conectado al robot. El robot realiza diversas operaciones como avanzar, retroceder, etc. si se presiona alguna tecla durante la llamada, escuchando al otro lado de la llamada (es decir, en el celular conectado al robot). Cada tecla corresponde a una frecuencia específica que es decodificada por el decodificador DTMF y procesada por el circuito lógico, otorgando a cada tecla una operación específica como avance, retroceso, derecha, izquierda, etc. con un rango de trabajo tan grande como el área de cobertura del proveedor de servicios .

Fig. 1: Prototipo de automóvil robótico operado por dispositivo móvil basado en DTMF
Diagrama de bloques

Fig. 2: Diagrama de bloques de un automóvil robótico operado por dispositivos móviles basado en DTMF
Se utilizan robots controlados por teléfonos móviles para operar el robot mediante el teléfono móvil. Al conectar el teléfono celular al circuito, el teléfono celular puede controlar el robot a través del teclado del teléfono celular.
Nivel 1
Teléfono móvil
El teléfono celular se utiliza para dar instrucciones al robot presionando el teclado del teléfono celular. La salida del robot controlado por teléfono celular es una frecuencia de tono dual que es recibida por el receptor DTMF.
Etapa 2
Sección del receptor DTMF
La sección del receptor DTMF se utiliza para recibir el doble tono proveniente del teléfono celular. Es recibido por DTMF y decodificado por el mismo IC DTMF y entregado al siguiente circuito.
IC DTMF
Para recibir la frecuencia de tono dual del teléfono celular y convertirla en señal utilizable, utilizamos IC HT9370. Aquí obtenemos una explicación del IC HT9170. Ambos circuitos integrados son compatibles entre sí.
IC HT9170
HT9170 es la serie de receptores multifrecuencia de doble tono ( DTMF ) . Emplean técnicas de conteo digital para detectar y decodificar los 16 tonos DTMF en un código de salida de 4 bits. Los receptores de la serie HT9170 no requieren filtros externos ya que utilizan filtros condensadores conmutados de alta precisión para filtrar señales de baja y alta frecuencia de tonos DTMF. También admiten modos de apagado (PWDN) e inhibición (INH). El modo PWDN se utiliza para apagar el cristal, mientras que el modo INH para inhibir los tonos DTMF A, B, C y D. El reloj lo proporciona un cristal de 3,58 MHz.
En términos simples, el IC HT9170 detecta y decodifica los 16 tonos DTMF en una salida de 4 bits. Si no se detectan tonos, los cuatro bits de salida permanecen bajos. El pin DV se pone alto al detectar un tono válido.
Diagrama de pines:

Fig. 3: Diagrama de pines del IC del receptor DTMF HT9170
Descripción del pin:
|
Número de PIN |
Función |
Nombre |
|
1 |
Entrada no inversora del amplificador operacional |
Vicepresidente |
|
dos |
Entrada de amplificador operacional invertida |
VN |
|
3 |
Terminal de salida del amplificador operacional |
GS |
|
4 |
Terminal de salida de voltaje de referencia |
REFERENCIA |
|
5 |
Alto activo. Inhibe la detección de tonos correspondientes a A, B, C y D. Está internamente bajado. |
INH |
|
6 |
Alto activo. Esto pone el chip en modo de apagado e inhibe el oscilador. Está internamente derribado. |
PWDN |
|
7 |
Conexión para cristal estándar de 3,579545 MHz. |
X1 |
|
8 |
X2 |
|
|
9 |
Tierra (0V) |
V SS |
|
10 |
Alto activo; Habilita la salida D0-D3 |
equipo original |
|
11 |
Terminales de salida |
D0 |
|
12 |
D1 |
|
|
13 |
D2 |
|
|
14 |
D3 |
|
|
15 |
Datos válidos. Aumenta la recepción de señal DTMF válida; de lo contrario sigue siendo bajo |
DVD |
|
dieciséis |
Salida anticipada del volante |
husa |
|
17 |
El tiempo de adquisición y el tiempo de liberación del tono se pueden configurar mediante una resistencia y un condensador externos. |
TR/GT |
|
18 |
Voltaje; 5V (2,5V-5,5V) |
VERDADERO |
Prácticas de conducción motorizada.
Paso 3
Prácticas de conducción motorizada.
En este paso, se utiliza el controlador de motor IC L293D para accionar el motor. Como la señal proviene del IC inversor, impulsa el motor de acuerdo con las señales entrantes.
CI L293D
L293D es un circuito integrado (IC) de controlador de motor de puente H dual. Los controladores de motor actúan como amplificadores de corriente en el sentido de que reciben una señal de control de corriente baja y suministran una señal de corriente más alta. Esta señal de corriente más alta se utiliza para accionar los motores.
L293D contiene dos circuitos controladores de puente H integrados. En su modo de funcionamiento común, dos motores de CC pueden accionarse simultáneamente, tanto en dirección de avance como de retroceso. Las operaciones de motores de dos motores se pueden controlar mediante la lógica de entrada en los pines 2 y 7 y 10 y 15. La lógica de entrada 00 u 11 detendrá el motor correspondiente. Las lógicas 01 y 10 lo girarán en el sentido de las agujas del reloj y en el sentido contrario a las agujas del reloj, respectivamente.
La habilitación de los pines 1 y 9 (correspondientes a los dos motores) debe ser alta para que los motores entren en funcionamiento. Cuando una entrada de habilitación es alta, el controlador asociado está habilitado. Como resultado, las salidas se vuelven activas y funcionan en sintonía con sus entradas. Asimismo, cuando la entrada de habilitación es baja, este controlador se desactiva y sus salidas se apagan y se encuentran en un estado de alta impedancia.

Fig. 4: Diagrama de pines del IC del controlador del motor L293D
Tabla de verdad para el movimiento de robots.
|
Sr. no |
EN 1 |
EN 2 |
EN 3 |
IN4 |
movimiento de robots |
|
1 |
1 |
0 |
0 |
1 |
Avance |
|
dos |
1 |
1 |
1 |
1 |
Para detener |
|
3 |
1 |
0 |
1 |
0 |
Izquierda |
|
4 |
0 |
1 |
0 |
1 |
Bien |
La lógica de la señal cambiará según la condición.
Pasos para construir el robot controlado por celular
Accesorios necesarios para hacer un robot controlado por teléfono celular
|
Sr. no. |
Nombre del componente |
Cantidad |
| 1. | Soporte doble para pilas AA | 1 |
| dos. | Chasis (plataforma robótica) | 1 |
| 3 | tablero de prueba | 1 |
| 4 | Abrazadera | 1 |
| 5. | Estriptista | 1 |
| 6. | Un hilo central | Según uso |
| 7. | Alicates de punta | 1 |
| 8 | Destornillador | 1 |
Montaje mecánico de chasis robótico.
Paso 1:
Consigue un chasis robótico.

Fig. 5: Imagen representacional del chasis principal del robot
Paso 2:
Tome el motor BO como se muestra en el diagrama.
Paso 3:

Fig. 6: Imagen que muestra la fijación del motor al chasis del robot
Coger un tornillo M2.5 (25) para fijar el motor BO al chasis. Monte el motor hacia arriba como se muestra en la figura. Aquí el último agujero del chasis se utiliza para encajar el motor.
Observación
Aquí guardé el tornillo del motor M2.5 (25) en polietileno separado y tampoco lo mezclé con otro tornillo.

Fig. 7: Imagen que muestra el accesorio del motor en ambos lados del chasis del robot
Etapa 4

Fig. 8: Imagen que muestra la fijación de las ruedas a los motores del robot.
Coloque las dos ruedas en ambos ejes del motor como se muestra en la figura. Asegure el motor con un perno de rueda rojo autorroscante.
Paso 5

Fig. 9: Imagen representativa de la rueda giratoria y la tira del robot
Tome la rueda giratoria y la correa de la rueda giratoria como se muestra en el diagrama.
Paso 6

Fig. 10: Imagen que muestra la fijación de la rueda giratoria a la correa del robot
Inserte tres tornillos M3 -10 en la rueda giratoria. Ahora coloque la rueda giratoria en la correa de la rueda giratoria en dirección hacia afuera, como se muestra en la figura.
Paso 7
Ahora coloque la tira de las ruedas giratorias en la posición media del chasis como se muestra en el diagrama usando dos tornillos M3-10.
Ahora su plataforma robótica está lista para usar.

Fig. 11: Imagen que muestra la fijación de la correa de la rueda giratoria al chasis del robot
Conexión de placa de pruebas

Fig. 12: Imagen que muestra filas y columnas en una placa de pruebas
· Proporcione energía positiva de +5 voltios en la primera línea.
· Conecte GND a la segunda línea de la placa de pruebas.
· Conecte +5 voltios de la línea superior con la línea de abajo para hacer la línea debajo de +5 voltios.
Conecte la línea GND superior con la línea GND inferior para formar la línea GND de la línea de abajo.
· Cortocircuite las líneas intermedias de abajo conectando la línea de +5 voltios a +5 voltios y la línea de tierra a la línea de tierra.

Fig. 13: Imagen típica de una placa de pruebas
Construcción de un robot controlado por un teléfono móvil sobre una placa de prueba
· Fuente de energía
· Conductor
· Módulo DTMF
Diseño de la sección de suministro de energía.
Fuente de energía
Descripción general
La fuente de alimentación se utiliza para suministrar energía a todo el conjunto del circuito. Los siguientes componentes se utilizan para crear la sección de fuente de alimentación.
Lista de componentes para fuente de alimentación.
|
Sr. no. |
Nombre del componente |
Lista de componentes |
| 1 | Toma de corriente continua | 1 |
| dos | CI regulador de voltaje 7805 | 1 |
| 3 | LED de 3mm | 1 |
| 4 | Resistencia (220?) (Rojo, Rojo, Negro, Negro) | 1 |
Explicación del componente
Realice la siguiente conexión para la fuente de alimentación como se muestra en la imagen a continuación.
Toma de corriente continua

Fig. 14: Imagen típica de DC Jack

Fig. 15: Diagrama de pines del conector de CC
Diagrama de pines de conexión 7805
|
Sr. no |
Pin 7805 No |
Nombre del PIN 7805 |
|
1 |
Pin 1 |
+12 voltios (batería suministrada) |
|
dos |
Pin 2 |
tierra |
|
3 |
Pin3 |
+5 (salida para alimentar todo el circuito) |
Consultando las imágenes a continuación, puede realizar el circuito de alimentación.
1. Imagen de la placa de pruebas

Fig. 16: Imagen representativa del circuito de alimentación en la placa de pruebas.
2. Diagrama esquemático de la fuente de alimentación.

Fig. 17: Diagrama del circuito de alimentación del robot
Probando la sección de fuente de alimentación

Fig. 18: Imagen representativa del circuito controlador del motor en la placa de pruebas
Si el LED se enciende, significa que la conexión del circuito de alimentación es correcta. y ahora puedes darle poder a toda la asamblea.
Diseño de la sección del controlador del motor
Sección del controlador del motor
Descripción general
Ahora ha creado una sección de controlador de motor que se utiliza para accionar el motor. Aquí para accionar el motor se utiliza L293D IC.
Lista de componentes para la sección del controlador del motor
|
Sr. no |
Nombre del componente |
| 1. | Sección IC L29D3 |
| dos. | Un hilo central |
Diseño de la sección del controlador del motor.
Al consultar las imágenes y la tabla a continuación, puede crear y probar la sección del controlador del motor.
Conexión de clavija L293D
|
Sr. no |
Pasador L293 D |
Voltaje |
| 1 | Pin #1 | +5 voltios |
| dos | Pin #9 | +5 voltios |
| 3 | Pin #16 | +5 voltios |
| 4 | Pasador #8 | +12 voltios |
| 5 | Pines #4 y 5 | tierra |
| 6 | Pines #12 y 13 | tierra |
Conexión del motor con L293D IC
|
Sr. No. |
Pines de salida |
cable de motor |
| 1 | o/p1 | Primer cable del primer motor. |
| dos | o/p2 | Segundo cable del primer motor. |
| 3 | o/p3 | Primer cable del segundo motor. |
| 4 | o/p4 | Segundo cable del segundo motor. |
Imagen de la placa de pruebas

Fig. 19: Imagen representativa del circuito controlador del motor en la placa de pruebas
Imagen esquemática de la sección del controlador del motor

Fig. 20: Diagrama de circuito del controlador de motor basado en IC L293D
Proporcione la siguiente alimentación en el terminal de entrada del IC L293d para probar el motor.
|
Sr. No. |
Nombre del pin |
Suministro dado |
|
1 |
En 1 |
+5 |
|
dos |
En 2 |
tierra |
|
3 |
Em3 |
+5 |
|
4 |
En4 |
tierra |
Observación
· Cortocircuito entre los pines 4 (gnd) y 5 (gnd) con el jumper. El puente se puede quitar del cable.
· De la misma manera, también corta los pines 12 (gnd) y 13 (gnd) del IC l293D.
Prueba de la sección del controlador del motor
Paso 1
Conecte un cable del primer motor al pin o/p1 del IC L293D. Y el segundo es con el segundo o/p2 de IC L293D.
El motor debe girar en el sentido de las agujas del reloj desde el frente. Si el motor gira en sentido antihorario, gírelo en el sentido de las agujas del reloj cambiando su cable a los pines o/p L293D.
Paso 2
Conecte un cable del segundo motor al pin o/p3 del IC L293D. Y el segundo con el segundo o/p4 del L293D IC.
Ahora el motor debería girar en sentido antihorario desde el frente. Si el motor gira en el sentido de las agujas del reloj, hágalo en el sentido contrario cambiando su cable a los pines o/p L293D.
Módulo DTMF
Ahora hay que mover el chasis hacia adelante.
Módulo DTMF
Descripción general
Los módulos DTMF se utilizan para recibir la señal del teléfono celular y controlar el robot a través de la señal de salida del IC DTMF.
Módulo DTMF
Para crear el módulo DTMF, se requieren los siguientes componentes.
El componente necesario para realizar el circuito lógico se muestra en la siguiente tabla.
|
Sr. no. |
Nombre del componente |
Cantidad |
| 1. | IC HT9370 | 1 |
| dos. | cristal de 3,57Hz | 1 |
| 3. | LED (5 mm) | 4 |
| 4. | ¿10 mil? R9 (marrón, negro, negro, rojo) | 4 |
| 5. | ¿100.000? R8 (marrón, negro, negro, naranja) | dos |
| 6. | Condensador C1 y C2 (33pF) Condensador cerámico | dos |
| 7. | Condensador C4 (104) Condensador cerámico | 1 |
| 8. | Condensador C5(104) Condensador cerámico | 1 |
| 8. | 330k (naranja, naranja, negro, naranja) | 1 |
| 9. | Entrada de audio | 1 |
Explicación del componente
Entrada de audio

Fig. 21: Imagen típica de un conector de audio
Los conectores de audio se utilizan para conectar el teléfono celular al circuito DTMF.
Abra el conector de audio y conecte el terminal más largo (GND) con el cable de diez núcleos y el terminal más pequeño en el lado izquierdo (terminal de entrada) con otro cable de diez núcleos.

Fig. 22: Imagen que muestra el cableado interno del conector de audio
Conecte el pin de entrada a un terminal del condensador y el otro al terminal GND.
Conexión de la sección IC del Módulo DTMF
|
Sr. no |
arreglar no |
Conexión de componentes |
| 1 | 1 | Corto con pin #4 |
| dos | dos | Resistencia de 100 k y condensador de 104 |
| 3 | 3 | Resistencia de 100k con pin #2 |
| 4 | 5 | Corto con pin #9 |
| 5 | 6 | Corto con pin #9 |
| 6 | 7 y 8 | Cristal de 3,57MHz |
| 7 | 10 | + 5 voltios |
| 8 | 11,12,13,14 | Resistencia de 10k con terminal positivo del LED |
| 9 | 15 | Abierto |
| 10 | dieciséis | 330 mil resistentes |
| 11 | 17 | 104 condensadores |
| 12 | 18 | +5 voltios |
También haga la conexión a continuación
· Haga un corto entre los pines 1 y 4 y también haga un corto entre los pines 5 y 9 y 6.
· Conecte un terminal de la resistencia de 100k con el pin #2 y otro terminal con el terminal del capacitor 104 y otro terminal con la entrada del jack de audio.
· Conecte un terminal de 100k al pin #3 y otro terminal al pin #2.
· Conecte el cristal de 3,57 MHz a los pines 7 y 8 y también conecte un terminal de dos condensadores de 33 pf al cristal y otro terminal a tierra.
· Dar + 5 voltios al pin nº 10 del IC.
· Conectar el pin 11,12,13,14 con un terminal de la resistencia de 1k y otro terminal con el terminal positivo del LED y su terminal negativo con GND.
· El pin n.º 15 permanece abierto.
· Pin #16 con un terminal del resistor de 330 k y otro terminal con el pin #17.
· Conecte el pin #17 con un terminal del capacitor 104 y su otro pin terminal con +5 voltios.
· Dar +5 voltios al pin #18.
· Conecte el cable de entrada del conector de audio con el condensador 104 y otro GND con el pin GND en la placa de pruebas.
1. Imagen de la placa de pruebas del módulo DTMF

Fig. 23: Imagen representacional del circuito decodificador DTMF en la placa de pruebas.
2. Diseño esquemático de la sección del módulo DTMF

Fig. 24: Diagrama de circuito del receptor DTMF basado en IC CM8870CP
Solución de problemas del circuito
· Verificar la continuidad de todo el circuito colocando el multímetro en modo continuidad .
· Compruebe también el voltaje en diferentes puntos del circuito utilizando el multímetro. También verifique el voltaje en los diferentes pines del IC.
· Conecte el condensador de 0,1 µf entre los pines +5 y Gnd en cualquier ubicación aleatoria de la placa.
· Puedes comprobar la frecuencia del cristal en CRO. Debería alcanzar aproximadamente 3,57 MHz.
· También puedes verificar la forma de onda de la señal de audio proveniente del teléfono celular en CRO. Vea la imagen a continuación proveniente de la señal de audio proveniente del teléfono celular.

Fig. 25: Imagen de señales de audio de teléfono celular mostradas en un CRO
Diagrama de circuito y montaje completo.
Circuito completamente conectado para robot controlado por teléfono móvil
Imagen de la placa de pruebas

Fig. 26: Imagen representativa del circuito de control completo para Robot on Breadboard
Imagen esquemática

Fig. 27: Diagrama de circuito de un robot sin microcontrolador operado de forma móvil
Conexión del motor con L293D IC
|
Sr. no. |
Pines de salida |
cable de motor |
| 1 | o/p1 | Primer cable del primer motor. |
| dos | o/p2 | Segundo cable del primer motor. |
| 3 | o/p3 | Primer cable del segundo motor. |
| 4 | o/p4 | Segundo cable del segundo motor. |
Conexión de la salida del módulo DTMF al IC L293D
Aquí Q1, Q2, Q3, Q4 representan la salida del módulo DTMF.
| Sr. no |
salida DTMF |
Salida L293D |
|
1 |
1er cuarto |
EN 1 |
|
dos |
2do cuarto |
EN 2 |
|
3 |
3er trimestre |
EN 3 |
|
4 |
4to cuarto |
IN4 |
Movimiento de plataforma robótica
· El movimiento de la plataforma robótica depende de la conexión del motor con el IC L293D.
· Inserte el conector de audio en el teléfono celular y verifique la indicación de los auriculares en la pantalla del teléfono celular.
· Abra la ventana del teclado y envíe cualquier tecla como 1,2,3.4, etc.
· Presione cualquier tecla de su teléfono celular como 1,2,3,4 y observe el movimiento robótico dependiendo de la tecla presionada.
Montaje completo de robot controlado por teléfono móvil.

Fig. 28: Imagen representativa del conjunto completo del robot operado móvil
· Coloque también la placa de pruebas en la plataforma robótica.
· Tome también un soporte para celdas de batería y colóquelo en la plataforma robótica.
· Puede alimentar la plataforma robótica a través del soporte de la batería o utilizando un adaptador de 12 voltios.

Fig. 29: Prototipo de automóvil robótico operado de manera móvil







