
La energía solar está ganando rápidamente notoriedad como un medio importante para expandir los recursos de energía renovable. Como tal, es vital que los profesionales de la ingeniería comprendan las tecnologías asociadas con esta área. Nuestro proyecto incluirá el diseño y la construcción de un sistema de seguimiento de paneles solares basado en un microcontrolador . El seguimiento solar permite producir más energía porque el panel solar puede permanecer alineado con el sol. Este sistema se basa en los temas aprendidos en este curso. Finalmente se demostrará un sistema funcional para validar el proyecto. También se presentarán problemas y posibles mejoras.
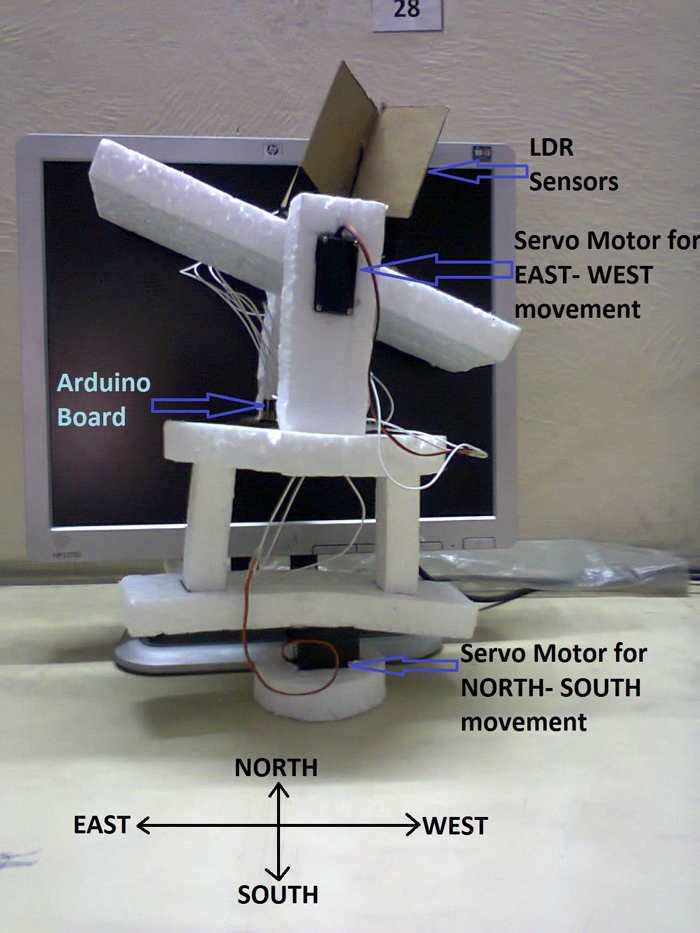
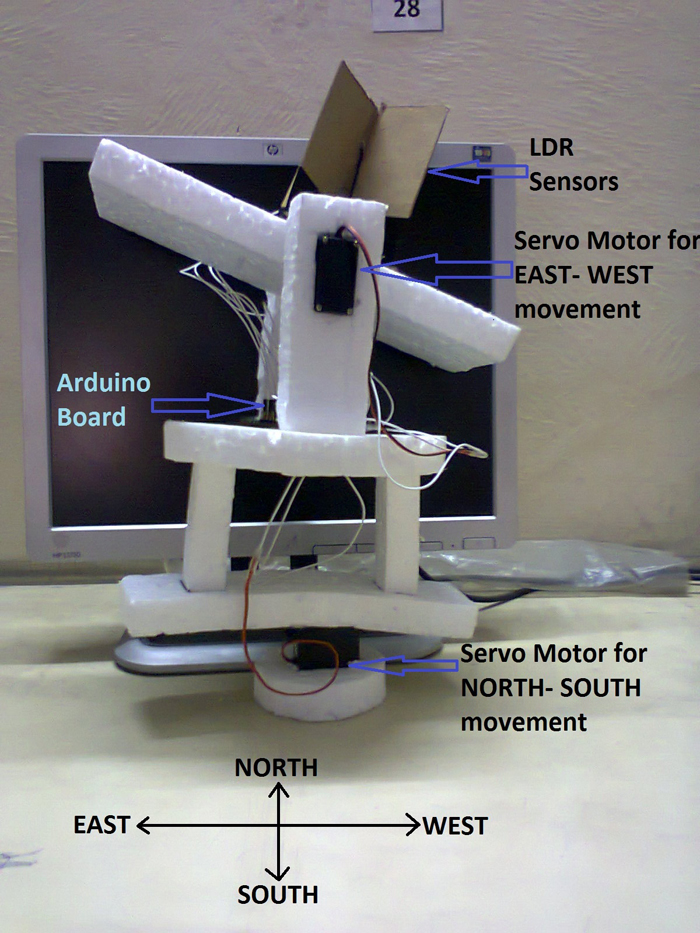
Configuración final del seguidor solar basado en Arduino
OBJETIVO DEL PROYECTO
El objetivo de este proyecto de seguidor solar es mantener el panel solar fotovoltaico perpendicular al sol durante todo el año para hacerlo más eficiente. El panel solar fotovoltaico de doble eje toma como referencia datos astronómicos y el sistema de seguimiento tiene la capacidad de apuntar siempre el panel solar hacia el sol y puede instalarse en diferentes regiones con modificaciones menores. El movimiento vertical y horizontal del panel se obtiene tomando como referencia el ángulo de altitud y el ángulo de acimut. El controlador difuso se ha utilizado para controlar la posición de motores de corriente continua. El control de simulación matemática del sistema de seguimiento solar de doble eje garantiza el movimiento punto a punto de los motores de CC mientras siguen al sol.
Solar Tracker es un dispositivo que sigue el movimiento del sol mientras gira de este a oeste todos los días. La función principal de todos los sistemas de seguimiento es proporcionar uno o dos grados de libertad de movimiento. Los rastreadores se utilizan para mantener los colectores/paneles solares orientados directamente hacia el sol a medida que éste se mueve por el cielo cada día. El uso de seguidores solares aumenta la cantidad de energía solar que recibe el colector de energía solar y mejora la producción de energía del calor/electricidad que se genera. Los seguidores solares pueden aumentar la producción de paneles solares entre un 20% y un 30%, lo que mejora la economía del proyecto de paneles solares.
NECESIDAD DE SEGUIDOR SOLAR
La energía proporcionada por el haz directo disminuye con el coseno del ángulo entre la luz entrante y el panel. No la mesa. 2.1 muestra el
Pérdida de potencia directa (%) debido a desalineación (ángulo L ).
Tabla: Potencia directa perdida (%) debido a desalineación (ángulo L )
|
Desalineación (ángulo L ) |
Potencia directa perdida (%)=1-cos(i) |
|
|
|
|
0 0 |
0 |
|
|
|
|
1 0 |
0,015 |
|
|
|
|
3 0 |
.14 |
|
|
|
|
8 0 |
1 |
|
|
|
|
23.4 0 |
8.3 |
|
|
|
|
30 0 |
13.4 |
|
|
|
|
45 0 |
30 |
|
|
|
|
75 0 |
>75 |
|
|
|
El sol viaja 360 grados de este a oeste por día, pero desde la perspectiva de cualquier ubicación fija, la porción visible es de 180 grados durante un período de medio día. Los efectos del horizonte local reducen esto un poco, haciendo que el movimiento efectivo sea de unos 150 grados. Un panel solar con una orientación fija entre los extremos del amanecer y el atardecer verá un movimiento de 75 grados en ambos lados y por lo tanto, según la tabla anterior, perderá el 75% de su energía por la mañana y por la noche. Girar los paneles hacia el este y el oeste puede ayudar a recuperar estas pérdidas. Un seguidor que gira en dirección este-oeste se conoce como seguidor de un solo eje.
El sol también se mueve 46 grados de norte a sur durante un año. El mismo conjunto de paneles colocados en el punto medio entre los dos extremos locales hará que el Sol se mueva 23 grados a cada lado, provocando pérdidas del 8,3%. Un rastreador que tiene en cuenta los movimientos diarios y estacionales se conoce como rastreador de doble eje.
DISEÑO DEL SEGUIDOR
Un seguidor solar es un dispositivo que orienta el conjunto fotovoltaico hacia el sol. En aplicaciones fotovoltaicas (PV) de panel plano, los seguidores se utilizan para minimizar el ángulo de incidencia entre la luz entrante y un panel fotovoltaico. Esto aumenta la cantidad de energía producida por el conjunto fotovoltaico.
Aquí podemos utilizar rastreadores de doble eje de altitud y azimut (AADAT). Los seguidores de doble eje extraen niveles máximos de energía solar debido a su capacidad de seguir al sol vertical y horizontalmente. No importa dónde esté el sol en el cielo, los seguidores de doble eje pueden posicionarse en la dirección del sol.
Una configuración de panel solar cuadrado tiene dos grados de libertad. Aquí se utilizan dos motores de CC para controlar los dos grados de libertad de rotación. Los motores se pueden montar directamente en los pasadores de rotación de las juntas rotacionales para reducir las pérdidas causadas por los enlaces y juntas y evitar el uso de más enlaces y mecanismos.
MOTOR DE CC Y CONDUCTOR
Los sistemas de seguimiento deberían consistir en dos motores, que controlan la posición del conjunto, y un circuito de control (analógico o digital) para accionar estos motores. Las siguientes secciones analizan algunos posibles tipos de motores que se pueden utilizar para este tipo de aplicación.
MODELO MATEMÁTICO
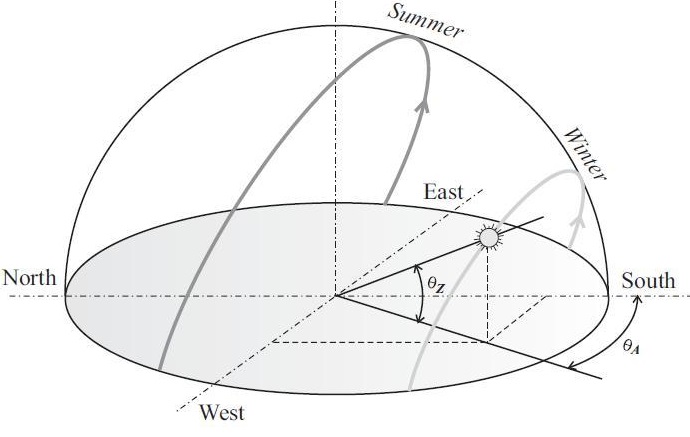
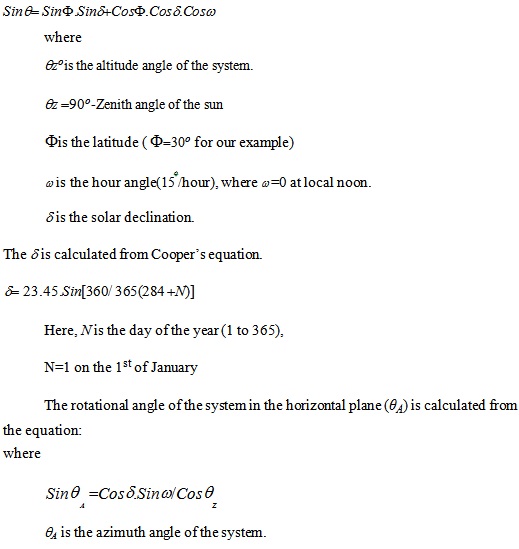
El higo. 3.3 muestra el comportamiento típico de la trayectoria del Sol en diciembre (invierno) y junio (verano). El ángulo de rotación del sistema de guía en el plano vertical se puede calcular a partir de la siguiente ecuación:
Fig. 3.3 Comportamiento típico de la trayectoria del Sol en diciembre (invierno) y junio (verano). ).
 Diseño de sistemas
Diseño de sistemas
DISEÑO DE SISTEMAS
El objetivo de un seguidor solar es determinar con precisión la posición del sol. Esto permite que los paneles solares interactúen con el seguidor para obtener la máxima radiación solar. Con este seguidor solar en concreto se realizó un sistema de circuito cerrado.
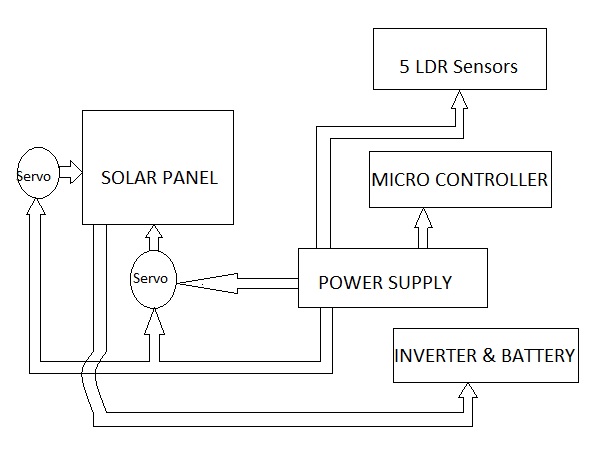
Diagrama de bloques general del sistema.
El sistema eléctrico consta de cinco sensores LDR que proporcionan retroalimentación a un microcontrolador. Este microcontrolador procesa la entrada del sensor y proporciona dos señales PWM para mover los servomotores.
Este servomotor mueve el panel solar hacia la mayor densidad de luz solar. Todo el sistema eléctrico está alimentado por una fuente de alimentación de 12 voltios.
Inicialmente se obtienen cinco valores analógicos diferentes de los LDR y luego se alimentan al microcontrolador. El microcontrolador proporciona dos señales PWM diferentes para el movimiento del panel solar a través del servomotor.Sensores
SENSORES

Usamos cinco resistencias dependientes de la luz como sensor. Sienten la zona de mayor densidad de luz solar. El panel solar se mueve al área de alta densidad de luz a través de servomotores.
Cada LDR está conectado a la fuente de alimentación formando un divisor de potencial. Por tanto, cualquier cambio en la densidad de la luz es proporcional al cambio de voltaje en los LDR.
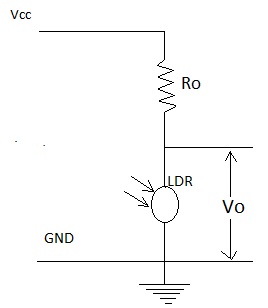
LDR es un transductor pasivo, por lo que usaremos un circuito divisor de potencial para obtener el valor de voltaje correspondiente de la resistencia LDR.
La resistencia de los LDR es inversamente proporcional a la intensidad de la luz que incide sobre él, es decir, a mayor intensidad o brillo de la luz, menor será la resistencia y viceversa.
Interfaces:
Entrada (ADC):
El Arduino tiene un convertidor analógico a digital (ADC) de 10 bits incorporado, por lo que puede proporcionar valores digitales de 0 a 1023 (ya que 2^10 = 1024). También podemos configurar el voltaje de referencia del ADC en Arduino, pero aquí dejaremos que use el valor predeterminado. El LDR tiene dos pines y para obtener el valor del voltaje utilizamos el circuito divisor de potencial. El giro es una función de la luz que incide sobre el LDR. Cuanto mayor sea la intensidad de la luz, menor será la resistencia LDR y, por tanto, menor será la tensión de salida (Vout). Cuanto menor sea la intensidad de la luz, mayor será la resistencia LDR y, por tanto, mayor el Vout.
Salida (PWM):
Arduino tiene un generador PWM de 8 bits, por lo que podemos obtener hasta 256 señales PWM. Para controlar un servo necesitamos obtener una señal PWM de la placa, esto generalmente se hace usando la función de temporizador del microcontrolador, pero Arduino lo hace muy fácil. Arduino proporciona una biblioteca de servos en la que tenemos que asignar solo el ángulo del servo (0-1800) y el servo gira en ese ángulo, todos los cálculos de PWM son manejados por la biblioteca de servos y obtenemos una señal PWM limpia según el ángulo deseado. .
PLACA ARDUINO SEVERINO:
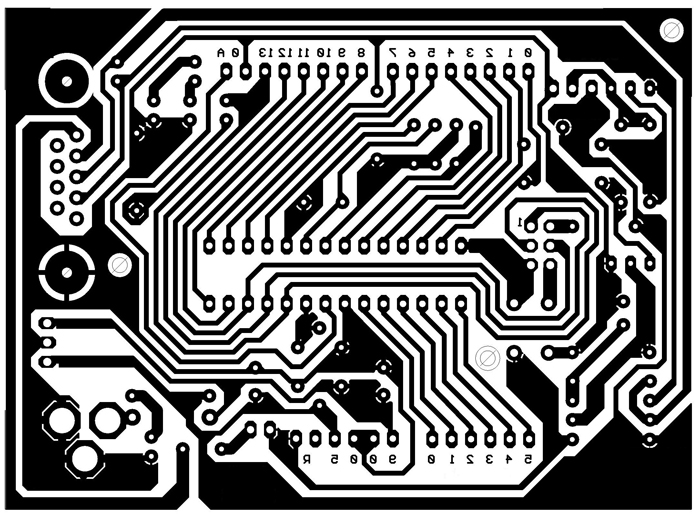
 archivo PCB
archivo PCB
Proyecto final
Código fuente del proyecto
###
# incluir
###
Diagramas de circuito
| Copia esquemática del Solar-Tracker | 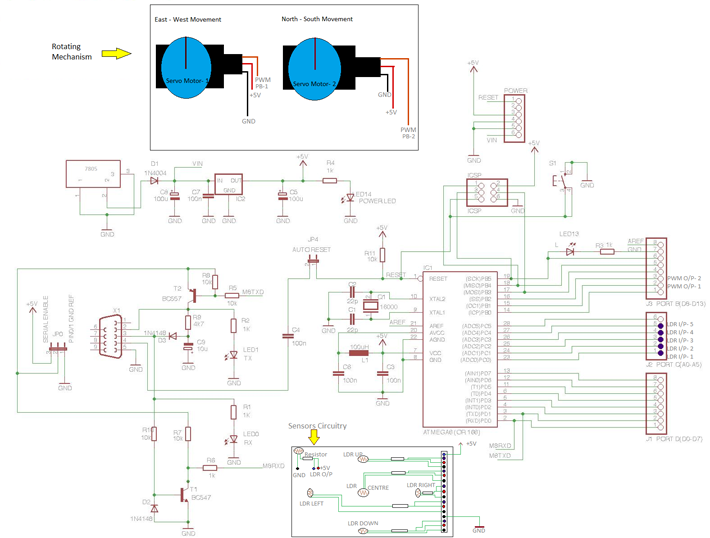 |







