
El artículo analiza el diseño de un controlador de ángulo de servomotor utilizando IC NE555. El servomotor utilizado aquí para un experimento es un microservomotor de 11 gramos con las siguientes especificaciones.
- Rango de rotación 160 °
- Tensión de funcionamiento 8 – 6 V
- Velocidad de funcionamiento 500 grados/seg a 4,8 V o 600 grados/seg a 6 V
- Par de parada 8 KG/CM O 2,4 KG/CM
- Ancho de pulso 550 us (0 o ) a 2,2 ms (160 o )
- Frecuencia de repetición de pulso (PRF) 50 Hz
El servomotor siempre tiene tres terminales, uno para voltaje +Ve, otro para voltaje –Ve y el tercero para señal de entrada PWM. Además, estos tres terminales están codificados por colores. En la mayoría de los motores, el cable rojo es para la entrada de voltaje +Ve, el cable marrón o naranja es para la entrada de voltaje –Ve y el cable amarillo o verde es para la entrada de señal PWM.
El motor se alimenta a través de cables +Ve y –Ve conectando el cable +Ve con 5 a 6 V y el cable –Ve con tierra. La entrada PWM es la señal real que hace girar el motor en el ángulo exacto. Como el ancho del pulso de entrada varía de 500 us a 2200 us (2,2 ms), el motor gira de 0 o a 160 o . Además, el impulso debe aplicarse a una frecuencia de 50 Hz, es decir, cada 20 ms. A medida que el ancho del pulso aumenta continuamente de 500 us a 2200 us, el ángulo del motor aumenta de 0 o a 160 o y viceversa.
Pero como sabemos, IC NE555 también se usa ampliamente para generar señales PWM. Por lo tanto, para controlar con precisión el ángulo del servomotor y girarlo en un ángulo exacto, es necesario aplicar una señal PWM precisa, lo cual es posible con un microcontrolador. Aquí ilustramos cómo se puede construir un controlador de ángulo de servomotor simple utilizando IC NE555.
El IC NE555 debe configurarse en modo astable para generar pulsos continuos y, además, su tiempo de ENCENDIDO debe ser significativamente más corto en comparación con el tiempo de APAGADO. Vea la figura a continuación para comprender mejor.
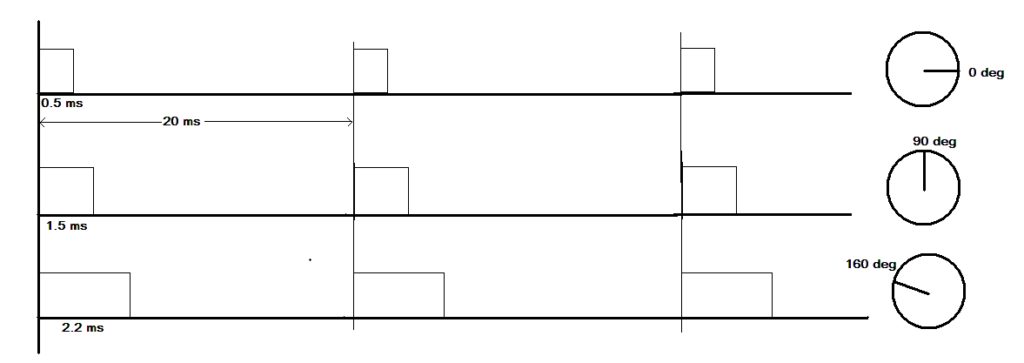
Para generar dicha forma de onda, necesitamos la siguiente configuración astable de IC NE555.
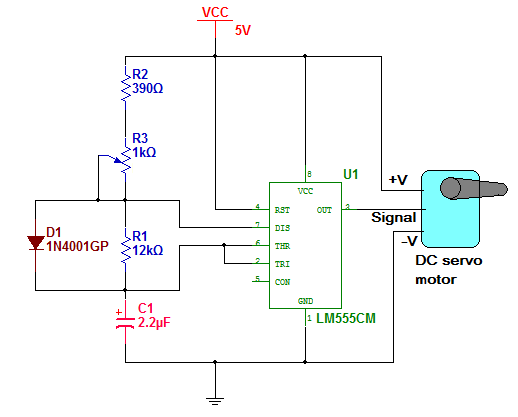
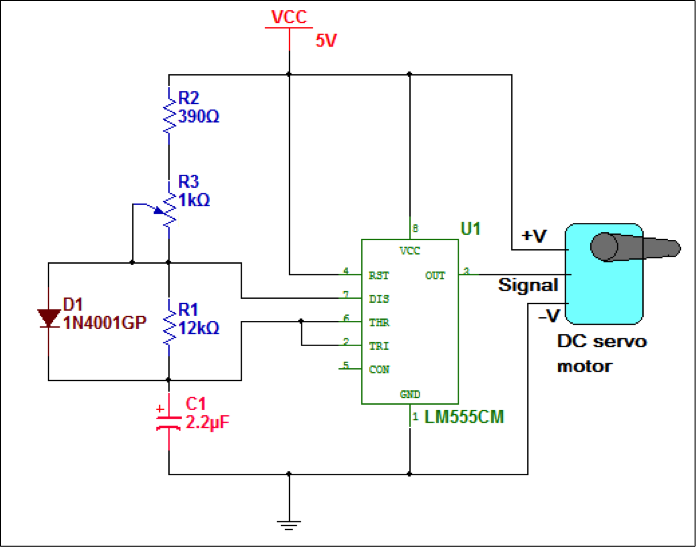
Diagrama de circuito
La figura muestra que IC NE555 está conectado en modo astable con las resistencias R1, R2 y el condensador C1. Se agrega un diodo conectado a R1 entre los terminales 7 y 6, sin pasar por R1 durante la carga de C1. La salida del chip está conectada a la entrada de señal PWM del servomotor. El circuito recibe una fuente de alimentación de 5 V.
Diseño de circuito
En este circuito, el valor de R1 y C1 es fijo, pero el valor de R2 debe ser variable para variar el ancho del pulso. Por lo tanto, para diseñar el circuito para generar la onda PWM requerida, tenemos que averiguar los valores de R1, R2 y C1. Entonces vamos a comenzar.
Ttotal = TONELADAS -TOFF
TOFF = Ttotal -TON
= 20 – 2,2
= 17,8
≈ 18ms
Ahora la ecuación para Toff es
TOFF = 0,69×R1×C1
Supongamos que C1 es 2,2 uF. Reemplazo de valores
18×10-3 = 0,69×R1×2,2×10-6
Esto nos dará R1 como
R1 = 11,85 KΩ
Entonces, considere R1 como 12 KΩ. Esto nos da dos valores para el diseño de circuitos.
R1 = 12 KΩ y C1 = 2,2 uF
El tiempo mínimo de activación es de 550 nodos. Es mínimo cuando R2 es mínimo. La ecuación del tiempo de encendido es la misma.
TONELADA = 0,69×R2min×C1
Conocemos los valores de TON y C1, entonces,
550×10-6 = 0,69×R2mín×2,2×10-6
Esto da R2min como R2min = 362Ω
El valor real más cercano de R2 es 390 Ω. Por tanto, R2 puede ser 390 Ω.
Ahora vaya al tiempo máximo de activación que es 2200 nodos. Obviamente será cuando R2 sea máximo.
Entonces, TONELADAS = 0,69×R2max×C12200×10-6 = 0,69×R2max×2,2×10-6
Esto da R2max como
R2máx = 1450Ω = 1,4K ≈ 1K + 390Ω
Por tanto, si elegimos R2 como resistencia fija de 390 Ω y un potenciómetro de 1 K Ω, el diseño del circuito puede ser perfecto.
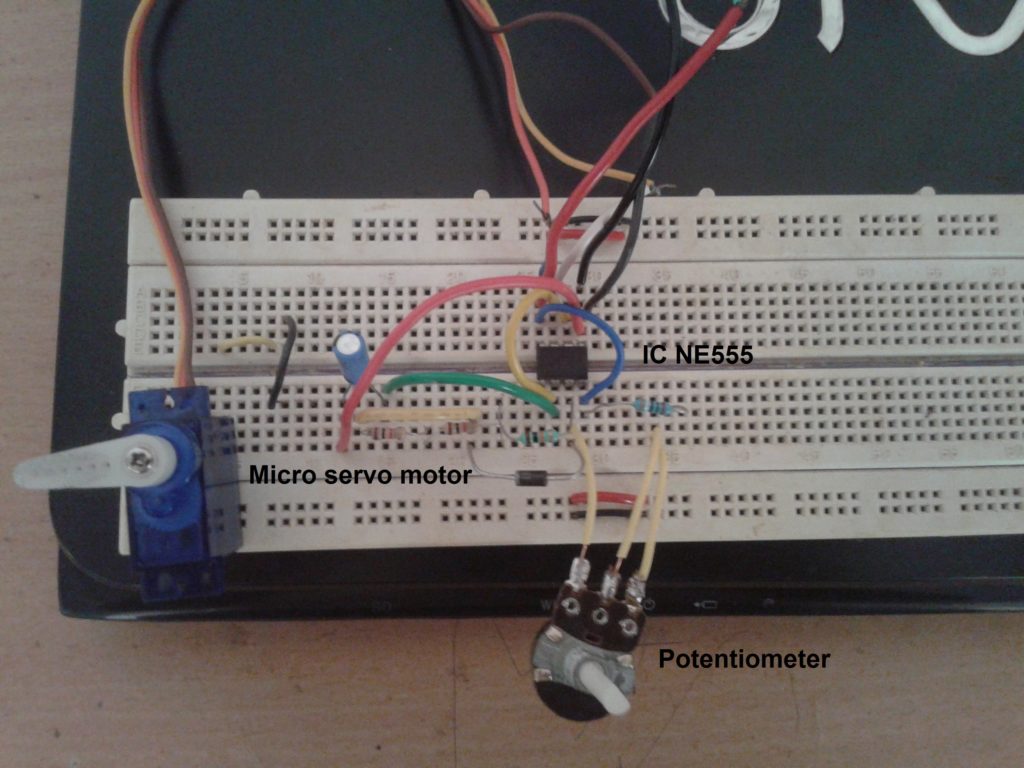
Aquí está la instantánea del circuito construido en el protoboard.
Operación del circuito
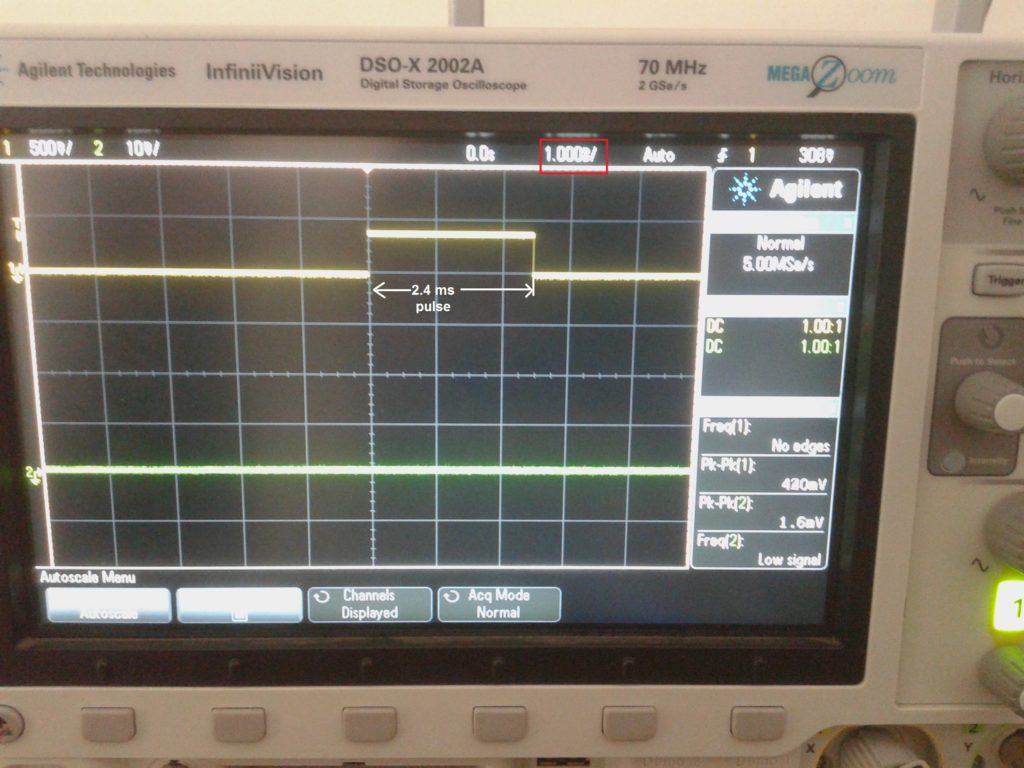
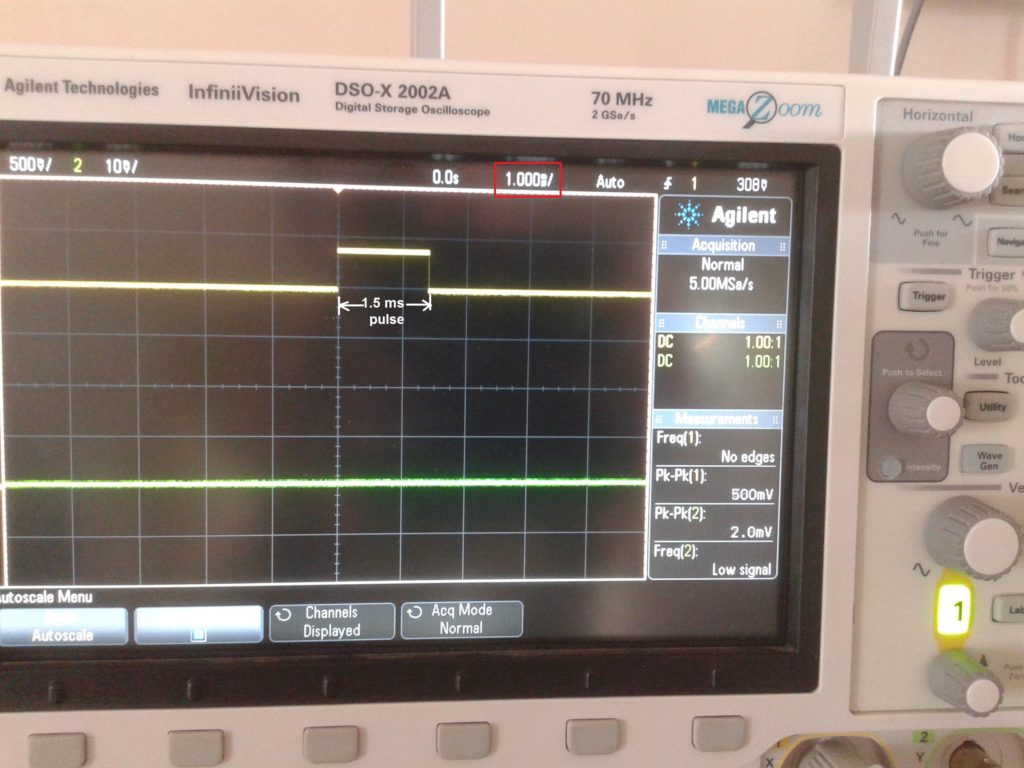
Cuando el circuito recibe un suministro de 5 V, genera una onda PWM a 50 Hz. Cuando esta onda se envía al servomotor, girará en un ángulo específico. A medida que aumenta el ancho del pulso, aumenta el ángulo del motor y viceversa. Estas son algunas de las instantáneas de la salida del circuito en DSO.
enlace del vídeo del proyecto youtube







