
Las secciones anteriores explicaron los filtros por sus propiedades, funciones matemáticas, respuestas en el dominio del tiempo y la frecuencia, y diferentes tipos. Utilizando el conocimiento teórico de las secciones anteriores, podemos implementarlo en el mundo real. Sin embargo, este circuito de filtro no funcionará según sus expectativas.
La siguiente figura muestra cómo funciona el filtro ideal y el real. La línea de puntos roja representa el filtro de paso bajo ideal y la línea azul representa el filtro real. Según la curva de filtro ideal, no debería pasar una frecuencia superior a 1 kHz. Pero en la vida real, esto sucede porque el filtro no realiza una transición para cortar la frecuencia bruscamente, como lo muestra la línea de puntos roja. Sucede como lo muestra la línea azul.
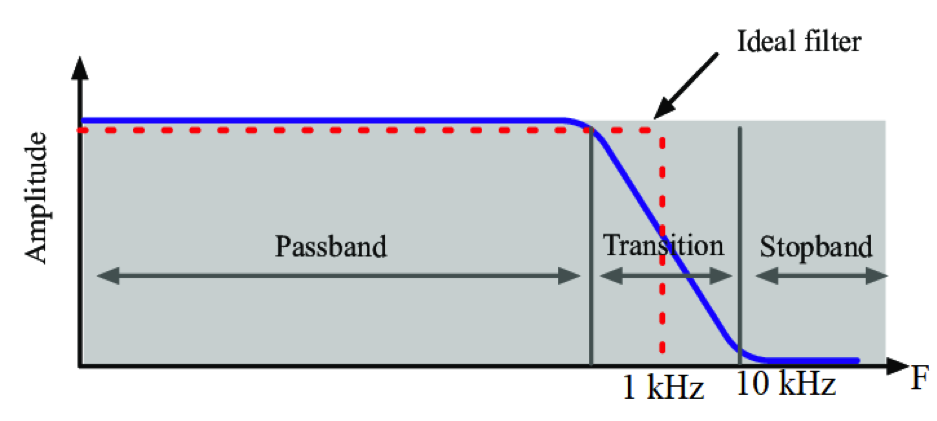
Figura 1: Transición de frecuencia de corte
Se utilizan varias secciones de orden dos y uno para diseñar un filtro de orden superior (generalmente mayor que dos). En este caso, el factor de frecuencia y calidad de cada tramo debe ser el mismo. De lo contrario, la respuesta general del circuito se desviará de la respuesta deseada. Esto no será exacto.
Por lo tanto, en el caso típico de ingeniería, se debe llegar a un acuerdo que sea exactamente lo que los diseñadores necesitan y que puede variar de un proyecto a otro. Los diseñadores deben preguntarse si su diseño debe tener la respuesta del filtro o la frecuencia exactamente como se desea, si la respuesta puede aceptarse a pesar de algunas ondulaciones en la banda de paso y si la frecuencia de corte se desvía de la frecuencia principal.
Algunas compensaciones son intrínsecas al diseño de filtros, principalmente debido a la fabricación de componentes semiconductores.
Componentes pasivos
El principal problema lo causan la resistencia, los condensadores y los inductores. Como estos componentes están disponibles en valores estándar, el valor calculado de condensadores, inductores y resistencias no estará disponible comercialmente. Sin embargo, se pueden personalizar. Es posible que los componentes pasivos comerciales no proporcionen el valor calculado exacto de los componentes pasivos, pero se pueden utilizar en paralelo o en serie. Esto aumentará el coste y el tamaño del proyecto y, paralelamente, aumentará el coste de fabricación. Nuevamente, estos componentes tendrán una tolerancia de +-1%. Su dependencia de la temperatura y la corriente también afectará su rendimiento.
Una forma práctica de ahorrar tiempo y costes es utilizar programas CAD existentes para analizar circuitos utilizando valores estándar de componentes pasivos. La desviación de los componentes se puede analizar en relación con la temperatura, y se puede analizar una combinación de componentes en serie y en paralelo para obtener la respuesta deseada dentro de unos límites.
Los valores calculados de los componentes pasivos determinan la frecuencia de corte y el factor de calidad de un filtro. Estos componentes pasivos desviarán la frecuencia de corte y el factor de calidad del filtro. Esta situación ocurre en filtros de orden superior porque pueden disminuir drásticamente la ganancia después de la frecuencia de corte en comparación con los filtros de orden inferior. El próximo artículo, "Implementación práctica de filtros", brindará un ejemplo práctico de un filtro de orden superior.
Cuanto mayor sea el factor de calidad, más crítico y preciso será el valor de los componentes. Una relación de dos o más componentes define el factor de calidad, normalmente condensadores. Además de la tolerancia de los componentes, también se puede añadir el efecto de la desviación de temperatura/tiempo. Especialmente los condensadores, ya que no sólo se desplazan, sino que también son función de la temperatura.
Durante la construcción del filtro, existen infinitas opciones para seleccionar el valor de los componentes pasivos, pero existe un límite en el tamaño práctico de los componentes. Los valores de condensador entre 20pF y 10uF son prácticos, pero no fuera de este rango. Para diseños de filtros, no se recomiendan los condensadores electrolíticos debido a su propiedad de fuga.
El mismo tipo de problema ocurre en ciertas resistencias. Para diseñar el filtro se recomiendan valores de resistencia entre 100 Ohm y 1 Mohm. Una resistencia inferior a 100 ohmios requiere más corriente para accionar el inversor y, por lo tanto, disipa más energía; En el diseño de un filtro se deben evitar estas dos situaciones. Los valores de resistencia grandes son más propensos a sufrir parásitos y se pueden acoplar fácilmente a capacitancias pequeñas.
En el diseño electrónico, el rendimiento del circuito se ve afectado por el diseño porque provoca capacitancias parásitas (capacitancia no deseada dentro del componente electrónico) en el diseño. Esto puede formarse entre dos trazas de una PCB en la misma capa o en el otro lado de la capa. Se pueden formar capacitancias parásitas entre terminales de componentes adyacentes. Como estas capacitancias tienen valores muy pequeños, tienen un gran efecto en los nodos de alta impedancia. Esto se puede controlar reduciendo la impedancia del circuito PCB. Recuerde que el efecto de las capacitancias parásitas depende de la frecuencia y el efecto aumenta con frecuencias más altas donde la impedancia cae.
Los parásitos no sólo están asociados con fuentes externas, sino también con los propios componentes.
Un condensador no es sólo un condensador. Tiene resistencia e inductancia en su cable conductor, como se muestra en la siguiente figura. En la especificación del capacitor, una resistencia indica fuga y bajo factor de potencia. En el diseño de filtros o cualquier otro diseño de circuito, se recomienda tener un capacitor con baja fuga y buen factor de potencia. T Lo mejor es un condensador de película de poliestireno o teflón y una resistencia de metal.
La siguiente figura muestra la resistencia de película metálica y el condensador de poliestireno.

Figura 2: Condensador de poliestireno y resistencia de película metálica
Es una buena práctica utilizar componentes de montaje en superficie para reducir los parásitos de los componentes. Debido a que los terminales de cualquier componente crean inductancia, los componentes SMD son ideales para el posicionamiento. La principal desventaja es que no todos los tipos de condensadores están disponibles en formato SMD. Los condensadores cerámicos son los mejores para diseños de filtros y la familia NPO tiene las mejores características. Los condensadores cerámicos son propensos a la retroalimentación y pueden actuar como sensores de movimiento que pueden transformar la vibración en sensores eléctricos, que serán ruido.

Fig. 3: Circuito equivalente de condensador
Debido a los terminales, la resistencia también tiene inductancia y capacitancia parásitas.
Limitaciones de los componentes activos en los filtros
Hay algunas propiedades de los amplificadores operacionales que pueden utilizarse mejor en el diseño de filtros.
1. ganancia infinita
dos. Impedancia de entrada infinita
3. Impedancia de salida cero
En el diseño de filtros, se utiliza un amplificador operacional en el diseño de filtros activos debido a las propiedades de los amplificadores operacionales que se explican a continuación:
Ganancia infinita (caso ideal): los amplificadores operacionales tienen ganancia, por lo que es mejor usar este componente en un filtro si tiene una señal de amplitud significativamente menor. Se puede agregar ganancia de amplificadores operacionales a la señal para amplificarla.
Impedancia de entrada infinita (caso ideal): Impedancia de entrada infinita (caso ideal) o impedancia de entrada alta (caso práctico) significa que la entrada del amplificador operacional no requiere ninguna corriente para alimentar la señal.
Impedancia de salida cero (caso ideal): los amplificadores operacionales tienen una impedancia de salida significativamente menor, lo que significa que pueden suministrar suficiente corriente para impulsar el circuito conectado.
Estas propiedades son verdaderas sólo para amplificadores operacionales ideales. Los amplificadores operacionales prácticos siempre tienen una impedancia de entrada alta, una impedancia de salida cercana a cero, ganancia ajustable y no varían con la frecuencia.
Los amplificadores se construyen con las limitaciones físicas de los dispositivos y, por lo tanto, tienen una banda limitada. Y la principal limitación del amplificador operacional es la variación de la ganancia con la frecuencia. La ganancia debe ser de primer orden para la estabilidad del amplificador operacional.
La sombría configuración del interruptor del amplificador operacional (una topología de diseño de filtro de segundo orden) es la que menos depende de la respuesta de frecuencia del amplificador operacional. Dado que el amplificador se utiliza en modo bloque de ganancia, es necesario que la respuesta sea plana justo después de la frecuencia donde comienza la atenuación mínima.
Mejora del factor de calidad y pico.
Al diseñar el filtro, es necesario no exceder el rango dinámico del amplificador. El pico en la respuesta del filtro puede deberse al aumento del factor de calidad por encima de 0,707. Los factores de alta calidad pueden provocar sobrecargas de entrada y salida.

Fig. 4: Efecto de la respuesta en frecuencia de los amplificadores operacionales sobre el factor de calidad.
El factor de calidad multiplicado por la ganancia también debe permanecer por debajo de la ganancia del bucle más cierto margen. El factor de calidad efectivo disminuye tan pronto como el amplificador se sobrecarga y la función de transferencia cambia aunque la salida parezca no distorsionada. Por lo tanto, está claro que aumentar el nivel de entrada cambiará la función de transferencia.
Estos principios se aplican a todo tipo de filtros, como los filtros de paso bajo, paso alto, paso de banda y rechazo de banda. La mejora en el factor de calidad no afectará a los filtros de paso alto ya que la frecuencia de resonancia será baja en relación con la frecuencia de corte.







