
Los motores de CC se utilizan comúnmente en proyectos eléctricos y electrónicos. Puede ser un robot seguidor de líneas, un coche teledirigido, persianas y puertas electrónicas, cerraduras digitales, drones y helicópteros, etc.; Los motores de CC se utilizan en una variedad de aplicaciones. Muchas de estas aplicaciones requieren control remoto de las operaciones del motor de CC. Aquí, controlar el motor se refiere a encenderlo o apagarlo, cambiar su velocidad y cambiar la dirección de su rotación. Por ejemplo, un automóvil controlado remotamente puede requerir que arranque o se detenga, aumente o disminuya la aceleración, o avance o retroceda controlando los factores antes mencionados de los motores de CC conectados a sus ruedas.
Este proyecto es una demostración sencilla de cómo controlar remotamente un motor de CC, encendiéndolo o apagándolo y cambiando la dirección de su rotación. El concepto ilustrado en el proyecto se puede utilizar en diversas aplicaciones en las que un microcontrolador puede estar en uso o no. Cualquier otro proyecto complejo que utilice un microcontrolador puede utilizar este concepto cambiando la sección del receptor de este proyecto donde el circuito del motor de CC conectado directamente al receptor de RF aquí también se puede conectar a través de un microcontrolador.

Fig. 1: Prototipo de controlador de motor RF DC
El módulo de RF utilizado en el proyecto es el módulo de 434 MHz. Transmite datos a una velocidad de transmisión de 1 Kbps a 10 Kbps y puede tener un alcance operativo de hasta 300 metros. Obtenga información sobre la configuración básica del transmisor y receptor de RF. El rango operativo se puede ampliar utilizando una antena de tamaño estándar y aumentando la potencia de transmisión de la antena. Obtenga más información sobre cómo aumentar el rango operativo del módulo de RF.
El módulo RF puede transmitir datos de 4 bits a la vez. Se requiere un conjunto de 2 bits como señal de control para el funcionamiento remoto de un único motor de CC. El proyecto muestra el control de dos motores CC de 12 V y 3000 RPM en la sección del receptor utilizando una señal de control de 4 bits. En el circuito se utiliza IC L293D (que puede controlar un máximo de dos motores de CC).
Componentes necesarios
| Sr. no. | Nombre del componente | Obligatorio |
|---|---|---|
| 1 | Módulo RF TX (434 Mhz) | 1 |
| dos | Módulo RX de RF (434 Mhz) | 1 |
| 3 | HT12E | 1 |
| 4 | HT12D | 1 |
| 5 | CONDUJO | 1 |
| 6 | Resistencia – 1KΩ (un cuarto de vatio) | 8 |
| 7 | Resistencia – 1MΩ (un cuarto de vatio) | 1 |
| 8 | Resistencia – 50 KΩ (un cuarto de vatio) | 1 |
| 9 | presionar el botón | 4 |
| 10 | motor de corriente continua | dos |
| 11 | Batería – 9V | 1 |
| 12 | Batería – 12V | 1 |
| 13 | L293D | 1 |
| 14 | Optoacoplador (MCT12E827Q) | 4 |
| 15 | tablero de prueba | dos |
| dieciséis | Interruptores DIP 8×1 | dos |
| 17 | Red de resistencias 8×1@1K | dos |
| 18 | Cables de conexión | – |

Fig. 2: Diagrama de bloques del controlador de motor de CC RF
Conexiones de circuito
El circuito tiene dos secciones: transmisor y receptor. La sección del transmisor es la configuración básica del transmisor de RF, que conecta el transmisor de RF a una antena y un codificador IC HT12E. El byte de dirección del transmisor se establece en 0x00 conectando a tierra todos los pines de dirección, y el pin 14 también se conecta a tierra para permitir una transmisión ininterrumpida. Los interruptores de encendido están conectados a los pines de datos del codificador IC que están conectados a VCC en otro terminal. De forma predeterminada, los pines de datos del codificador están conectados a tierra, pero al presionar un interruptor, el pin respectivo obtiene una entrada ALTA.
En el lado del receptor, el receptor de RF se configura de acuerdo con su configuración básica según lo dictan las hojas de datos del IC del decodificador HT12D y del receptor de RF. El byte de dirección del decodificador IC se establece en 0x00 para que coincida con el byte de dirección del transmisor de RF.

Fig. 3: Prototipo del lado del transmisor del controlador de motor RF DC
Los bits de datos D0 a D3 del IC decodificador HT12D están conectados al controlador del motor L293D. Los bits de datos no se pueden interconectar directamente con el L293D IC. Los motores de CC funcionan con una fuente de alta corriente de 12 V CC, mientras que el circuito receptor de RF funciona con una fuente de 5 V. Una contracorriente del circuito del motor de CC puede dañar los pines de datos del CI del decodificador. Por lo tanto, los pines de datos se conectan primero a optoacopladores, que interrumpen la corriente de retorno. El optoacoplador es una especie de aislador óptico o relé óptico. El optoacoplador tiene un diodo IR incorporado en un extremo y un fototransistor en el otro extremo. Cuando la corriente fluye a través del diodo IR, activa una corriente en el fototransistor de acuerdo con su configuración. Los optoacopladores 4N35 utilizados en el circuito tienen seis pines con la siguiente configuración de pines:
| ALFILER | Función | Nombre |
|---|---|---|
| 1 | Ánodo de diodo IR | Ánodo |
| dos | Cátodo de diodo IR | Cátodo |
| 3 | No conectado | CAROLINA DEL NORTE |
| 4 | Emisor de fototransistor | Editor |
| 5 | Base de fototransistor | Base |
| 6 | Colector de fototransistores | Coleccionista |

Fig. 4: Diagrama de pines del optoacoplador 4N25
Los pines de datos del decodificador IC están conectados al pin del ánodo de los optoacopladores y el pin del cátodo de los optoacopladores está conectado a tierra. El colector de los optoacopladores recibe VCC y la corriente de salida para los pines del IC L293D se extrae del pin emisor de los optoacopladores. Se utiliza un optoacoplador para cada pin de datos del decodificador IC. Los estados respectivos de los pines de datos se reflejan como en los pines emisores de los optoacopladores.
El L293D es el controlador IC de control del motor. Tiene 16 pines con la siguiente configuración de pines:
| PIN NO. | FUNCIÓN | NOMBRE |
|---|---|---|
| 1 | Habilitar los pines de entrada 1 y 2 del Motor 1 | Habilitar 1.2 |
| dos | Entrada 1 para motor 1 | Entrada 1 |
| 3 | Salida 1 para Motor 1 | Salida 1 |
| 4 | Piso | Piso |
| 5 | Piso | Piso |
| 6 | Salida 2 para Motor 1 | Salida 2 |
| 7 | Entrada 2 para motor 1 | Entrada 2 |
| 8 | Tensión de alimentación para los motores 1 y 2 | contra |
| 9 | Habilitar los pines de entrada 1 y 2 del motor 2. | Habilitar 3.4 |
| 10 | Entrada 1 para motor 2 | Entrada 3 |
| 11 | Salida 1 para motor 2 | Salida 3 |
| 12 | Piso | Piso |
| 13 | Piso | Piso |
| 14 | Salida 2 para Motor 2 | Salida 4 |
| 15 | Entrada 2 para motor 2 | Entrada 4 |
| dieciséis | Tensión de alimentación lógica | VSS |
El pin colector de los optoacopladores interconectados con D0 y D1 están conectados a la entrada 1 y 2 del IC L293D, respectivamente. El motor a controlar por los bits D0 y D1 está conectado entre los pines Salida 1 y Salida 2 del L293D. El pin colector de los optoacopladores interconectados con D2 y D3 está conectado a la entrada 3 y 4 del IC L293D respectivamente. El motor que será controlado por los bits D2 y D3 está conectado entre los pines Salida 3 y Salida 4 del L293D. Se suministra un suministro de 5 V al pin VSS y un suministro de 12 V de otra batería al pin VS del IC. Los pines 4, 5, 12 y 13 están conectados a tierra.
Cómo funciona el circuito
En el lado del transmisor, se utilizan interruptores de encendido para cambiar el estado de los bits de datos del codificador. Al presionar el interruptor se establece el bit de datos respectivo en ALTO, que de lo contrario permanece en BAJO por defecto. La transmisión es ininterrumpida y por defecto se transmite 0x0.
En el lado del receptor, los bits de datos se reciben desde los pines de datos del IC decodificador. En la transmisión exitosa del cuarteto de control, el bit de datos del decodificador respectivo tiene el mismo estado que el bit de datos del codificador IC respectivo, es decir, si D0 del codificador IC se cambia al estado ALTO, D0 del decodificador IC también pasará a ser ALTO. Cuando un bit de datos del IC decodificador está ALTO, la corriente fluye a través del ánodo hacia el cátodo del optoacoplador cuando el ánodo está conectado al pin de datos y el cátodo está conectado a tierra. Esto enciende el LED IR y activa el fototransistor. El pin base de los optoacopladores no está conectado. Los pines del colector están conectados a VCC y los pines del emisor salen a los pines del L293D. Así, el fototransistor funciona como un diodo conectado entre el colector y el emisor. Cuando se reciben señales infrarrojas debido a la señal ALTA en un pin de datos, la unión colector-emisor tiene polarización directa y se envía una señal ALTA al pin L293D respectivo.
Por lo tanto, los pines de entrada lógica del L293D están interconectados a los pines de datos del decodificador IC de la siguiente manera:
| PIN DE DATOS DEL DECODIFICADOR IC | PIN L293D |
|---|---|
| D0 | Entrada 4 |
| D1 | Entrada 3 |
| D2 | Entrada 1 |
| D3 | Entrada 2 |
El L293D IC controla motores de CC según las siguientes tablas de verdad:
| PIN1/HABILITAR ENTRADAS 1 Y 2 | PIN 2/ENTRADA 1 | PIN 7/ENTRADA 2 | Motor 1 (conectado entre PIN 3 y 6) Función |
|---|---|---|---|
| BAJO | N / A | N / A | El motor se detiene |
| ALTO | ALTO | ALTO | El motor se detiene |
| ALTO | BAJO | BAJO | El motor se detiene |
| ALTO | ALTO | BAJO | El motor gira en sentido antihorario |
| ALTO | BAJO | ALTO | El motor gira en el sentido de las agujas del reloj. |
| PIN 9/HABILITAR ENTRADAS 3 Y 4 | PIN 10/ENTRADA 3 | PIN 15/ENTRADA 4 | Motor 2 (Conectado entre PIN 11 y 14) Función |
|---|---|---|---|
| BAJO | N / A | N / A | El motor se para |
| ALTO | ALTO | ALTO | El motor se detiene |
| ALTO | BAJO | BAJO | El motor se para |
| ALTO | ALTO | BAJO | El motor gira en sentido antihorario |
| ALTO | BAJO | ALTO | El motor gira en el sentido de las agujas del reloj. |
El motor 1 está conectado entre los pines 3 (salida 1) y 6 (salida 2) del IC L293D. Mientras que el motor dos está conectado entre los pines 11 (salida 3) y 15 (salida 4) del IC L293D. Los motores permanecen detenidos hasta que los pines de habilitación permanecen BAJOS o los pines de habilitación reciben ALTO, pero ambos pines de entrada correspondientes al motor están en ALTO o BAJO. En el circuito, habilite los pines 1 y 9 de forma predeterminada en ALTO y el nibble predeterminado transmitido en RF es 0x0, la señal BAJA permanece para los pines de entrada L293D. Por lo tanto, ambos motores permanecen detenidos por defecto.

Fig. 5: Prototipo del lado del receptor del controlador de motor RF DC
Para controlar el motor 1, es necesario cambiar los bits D3 y D2 de la señal de transmisión. Al presionar el interruptor conectado al pin D3 del codificador, se transmite 0x8. Esto a su vez cambia el estado del pin de entrada 2 del L293D a ALTO, mientras que las entradas 1, 3 y 4 permanecen BAJAS. Por tanto, el motor 1 gira en el sentido de las agujas del reloj según la tabla de verdad de L293D. Al presionar el interruptor conectado al pin D2 del codificador, se transmite 0x4. Esto a su vez cambia el estado del pin de entrada 1 del L293D a ALTO, mientras que las entradas 2, 3 y 4 permanecen BAJAS. Por tanto, el motor 1 gira en sentido antihorario según la tabla de verdad L293D. Las operaciones en el motor 1 se resumen a continuación:
| D3 | D2 | D1 Y D0 | Datos transmitidos | L293D ENTRADA 1 | L293D 2 entradas | Función del motor 1 |
|---|---|---|---|---|---|---|
| 0 | 0 | 0 | 0x0 | BAJO | BAJO | El motor se detiene (predeterminado) |
| 1 | 0 | 0 | 0X8 | BAJO | ALTO | El motor gira en el sentido de las agujas del reloj. |
| 0 | 1 | 0 | 0X4 | ALTO | BAJO | El motor gira en sentido antihorario. |
Para controlar el motor 2, es necesario cambiar los bits D1 y D0 de la señal de transmisión. Al presionar el interruptor conectado al pin D1 del codificador, se transmite 0x2. Esto a su vez cambia el estado del pin de entrada 3 del L293D a ALTO, mientras que las entradas 1, 2 y 4 permanecen BAJAS. Por tanto, el motor 2 gira en sentido antihorario según la tabla de verdad L293D. Al presionar el interruptor conectado al pin D0 del codificador, se transmite 0x1. Esto a su vez cambia el estado del pin de entrada 4 del L293D a ALTO, mientras que las entradas 1, 2 y 3 permanecen BAJAS. Por tanto, el motor 2 gira en el sentido de las agujas del reloj según la tabla de verdad L293D. Las operaciones en el motor 2 se resumen a continuación:
| D0 | D1 | D2 Y D3 | datos transmitidos | L293D 3 entradas | L293D 4 entradas | Función del motor 2 |
|---|---|---|---|---|---|---|
| 0 | 0 | 0 | 0x0 | BAJO | BAJO | El motor se detiene (predeterminado) |
| 0 | 1 | 0 | 0X2 | ALTO | BAJO | El motor gira en sentido antihorario. |
| 1 | 0 | 0 | 0X1 | BAJO | ALTO | El motor gira en el sentido de las agujas del reloj. |
Diagramas de circuito
| Diagrama de circuito-RF-DC-Motor-Controller | 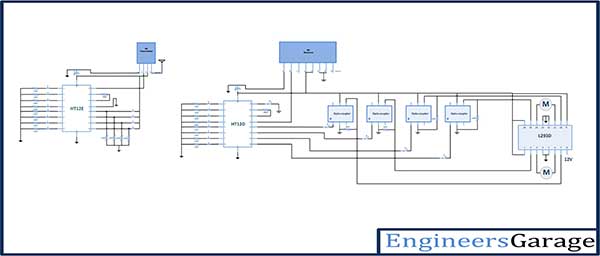 |







