Las versiones recientes de SIMULINK tienen un paquete de soporte para Arduino (UNO, Mega2560, etc.), BeagleBone, etc. Esto hizo que fuera más fácil crear maquetas y enviar diseños directamente al tablero.
En este proyecto, usaremos la herramienta SIMULINK para hacer parpadear un LED conectado a nuestro Arduino UNO.
Es una herramienta basada en diagramas de bloques en la que no es necesario escribir código en C ni nada por el estilo, sino que el modelo de diagrama de bloques se convierte y carga directamente en la placa mediante herramientas MATLAB. Para comenzar, generaremos un código de parpadeo LED y lo ejecutaremos en Arduino-UNO.
Pero antes de comenzar, es necesario comprobar algunos requisitos previos. Su computadora debe tener Matlab-R2013 o superior (este tutorial está en MATLAB-R2014a). Si tiene la versión para estudiantes de MATLAB -2013 o 2014, servirá.
Ahora necesitamos instalar el paquete de soporte Arduino desde el sitio web oficial de MathWorks.
Después de completar los pasos anteriores, comencemos a crear el diseño de nuestro sistema:Cuando abre MATLAB, aparece una pantalla con varias ventanas incrustadas, a saber. Ventana de comando, etc. Seleccione la biblioteca SIMULINK en la barra de menú de la ventana principal.
Verá una pantalla emergente de la siguiente manera:

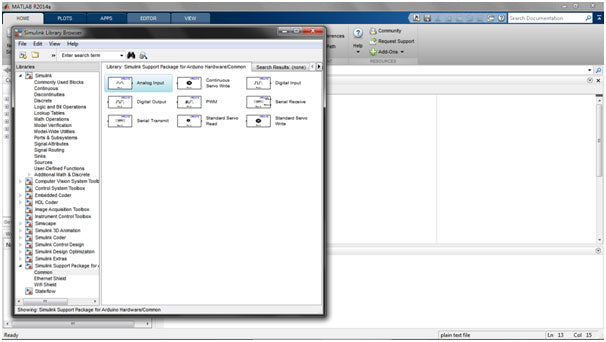
Vaya al 'Paquete de soporte de Simulink para Arduino' y verá una pantalla como la de arriba.
Cont..
Seleccione Salida digital de la lista para controlar el LEAD . Haga clic derecho y seleccione 'Agregar a nueva plantilla'.
Después de eso, verá una ventana del modelo de Simulink como se muestra a continuación:


Después de eso, necesitamos generar un pulso , que encenderá y apagará nuestro LED. Para lograr esto, haga clic nuevamente en Simulink Library. Vaya a 'Fuentes' y seleccione Generador de impulsos de la lista y agréguelo a la plantilla haciendo clic derecho sobre él.

Conecte los dos bloques juntos. Ahora haga doble clic en 'Generador de pulsos' para editar sus propiedades. Puede configurar el retraso, el tiempo de muestreo, etc. de su elección. Como ejemplo, puedes definir los que se muestran a continuación:

Después de completar los pasos anteriores, definiremos el 'Hardware de destino' y estableceremos sus propiedades. Vaya a ' Herramientas ' en la barra de menú y seleccione ' Ejecutar en el hardware de destino '; aparecerá una ventana emergente como se muestra a continuación:

Seleccione el hardware de destino (digamos Arduino UNO) y elija el puerto COM. Puede seleccionarlo manualmente si no funciona automáticamente.

Seleccione 'Aplicar' y haga clic en Aceptar. Felicidades…!!!
Estamos a sólo un paso. En la barra de menú, seleccione la opción ' Implementar en hardware '.
Si muestra errores, vuelva a verificar el puerto COM desde Administrador de dispositivos->Puertos.
Como extensión del sistema anterior, puedes agregar dispositivos de entrada, agregar lógica a tu proyecto o diseñar tu robot seguidor de primera línea en Simulink..!!!






