Aquí tenéis una muy buena e interesante aplicación para controlar un modelo de lanzamisiles a través de un smartphone mediante una aplicación Bluetooth de Android. El modelo de lanzamisiles está construido con dos servomotores. Un servomotor (motor de azimut) hace girar el lanzamisiles hacia la izquierda y hacia la derecha, mientras que otro servomotor (motor de elevación) mueve el lanzamisiles hacia arriba y hacia abajo. Estos dos servomotores se controlan mediante una aplicación Bluetooth de Android en un teléfono inteligente. El usuario presiona los botones de la aplicación para mover el lanzador de misiles hacia arriba/abajo o girar hacia la izquierda/derecha y la aplicación enviará comandos a través del Bluetooth integrado del teléfono. El proyecto se construye utilizando un módulo Bluetooth y una placa Arduino NANO que recibirá comandos de teléfonos inteligentes y rotará ambos servomotores para posicionar el lanzador de misiles de acuerdo con los comandos del usuario.
La aplicación demuestra el control de dos servomotores utilizando un teléfono inteligente con la ayuda del módulo Bluetooth y Arduino NANO. Es un proyecto muy simple, fácil de construir, pero aún así muy interesante. Sólo requiere de dos a tres componentes y pocas conexiones y ¡¡¡listo!!!
Entonces comencemos a construir el proyecto. Primero comencemos con un diagrama esquemático, sus conexiones y seguido de su funcionamiento.
Diagrama esquemático
 Descripción del circuito:
Descripción del circuito:
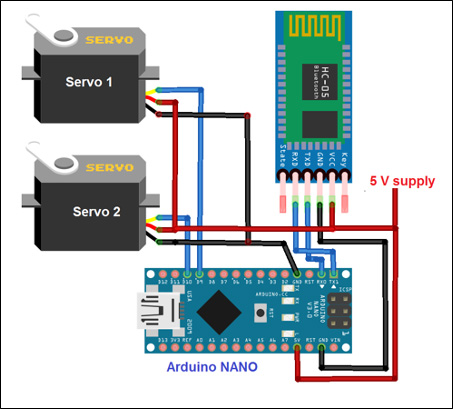
Como se muestra en la figura, solo hay 4 componentes en el circuito, un módulo Bluetooth HC-05, una placa Arduino NANO y 2 servomotores.
- El HC-05 tiene 4 pines para interfaz (1) Vcc (2) Gnd (3) Tx y (4) Rx. Sus pines Vcc y Gnd están conectados a los pines 5V y Gnd de la placa Arduino, respectivamente. Otros dos pines Tx y Rx están conectados a los pines Rx (D1) y Tx (D0) de Arduino respectivamente.
- Ambos servomotores tienen 3 cables para interconectar (1) Vcc (2) Gnd y (3) señal. Nuevamente, los pines Vcc y Gnd están conectados a los pines 5V y Gnd de la placa Arduino respectivamente.
- La entrada de señal del servomotor 1 está conectada al pin de salida PWM D9 de la placa Arduino y la entrada de señal del servomotor 2 está conectada al pin de salida PWM D10 de la placa Arduino
Operación del circuito
El circuito se alimenta suministrando 5V a través de USB o mediante una fuente de alimentación externa de 5V. Cuando se suministra energía, ambos motores alcanzan 0 ° y el lanzador de misiles apunta a su posición inicial.
Ahora, para rotar el lanzador de misiles en dirección azimutal (horizontal) o elevación (vertical), debe enviar comandos desde su teléfono inteligente usando la aplicación Bluetooth de Android.
- En primer lugar, debes abrir la aplicación de Android en tu teléfono inteligente. Esta aplicación buscará y se emparejará con el módulo HC05 (para emparejar por primera vez, debe ingresar una contraseña de Bluetooth para el módulo HC05, que por defecto es 1234)k
- Así alguien puede enviar diferentes comandos a una aplicación que se transmite a través del Bluetooth integrado de un teléfono
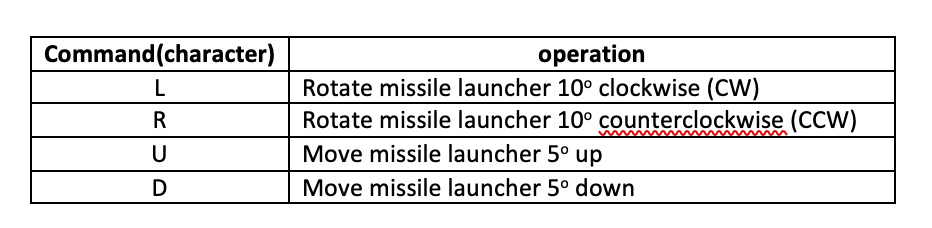
- En el programa se definen cuatro comandos diferentes para girar el lanzamisiles en el sentido de las agujas del reloj, en el sentido contrario a las agujas del reloj y moverse hacia arriba y hacia abajo.
- El servomotor 2 es un motor de elevación. Mueve el lanzador de misiles hacia arriba y hacia abajo girando el motor CW o CCW. Mueve el lanzador de misiles desde 0º hasta un máximo de 45º
- Cuando el comando se envía desde el teléfono, lo recibe el módulo HC-05. El módulo da este comando al microcontrolador Arduino a través de comunicación serial
- El microcontrolador Arduino toma este comando y lo compara con los 4 comandos definidos. Según la coincidencia encontrada, girará el servomotor 1 o el servomotor 2 en el sentido de las agujas del reloj o en el sentido contrario a las agujas del reloj y moverá el lanzador de misiles hacia arriba/abajo o girará en el sentido de las agujas del reloj o en el sentido contrario a las agujas del reloj.
Este funcionamiento del circuito sigue el programa integrado en el microcontrolador Arduino NANO ATMega328. Entonces, veamos el programa de software para este sistema. El servomotor 1 es el motor de acimut. Gira el lanzador de misiles hacia la IZQUIERDA o DERECHA girando el motor CW o CCW. Puede girar el lanzador de misiles desde 0 ° hasta un máximo de 180 ° .
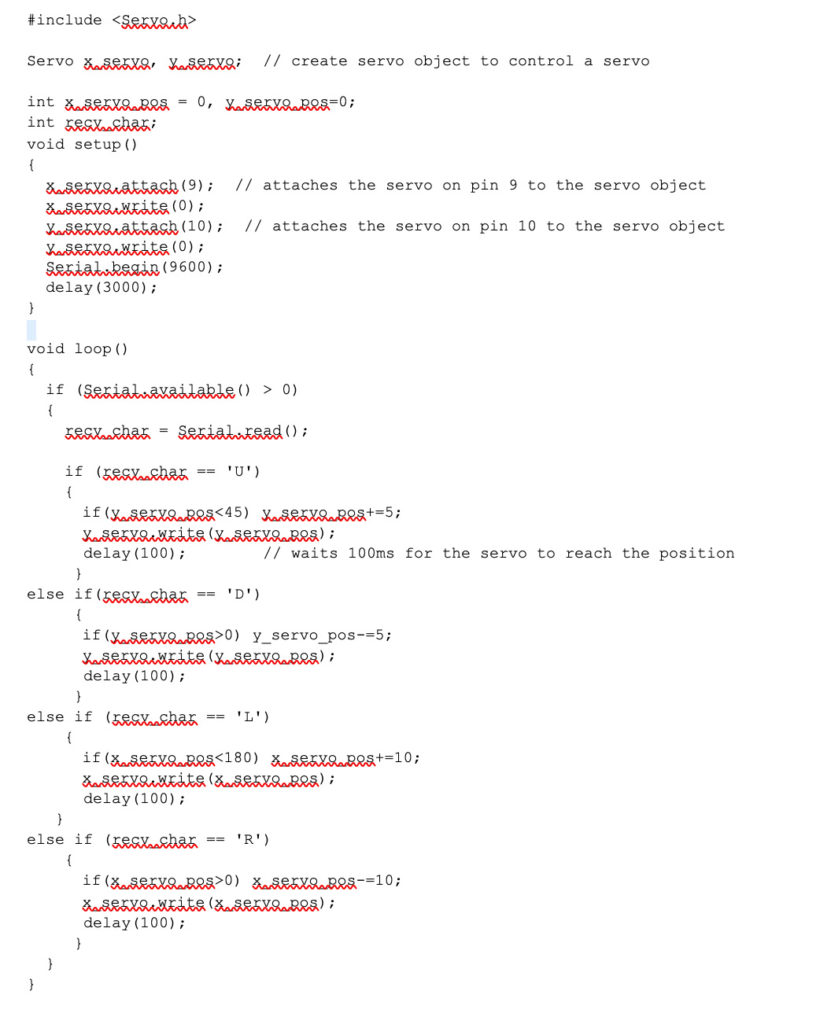
Programa de software
El programa está escrito en lenguaje C/C++ utilizando la herramienta de software Arduino IDE. También se compila y descarga en la memoria interna (FLASH) del microcontrolador ATMega328 mediante este mismo software. Aquí está el código del programa.