Los motores de derivación de CC han sido una parte integral de innumerables aplicaciones comerciales e industriales debido a su robustez, confiabilidad y eficiencia. Con un marco y un puerto bien diseñados, estos motores versátiles tienen características únicas que los hacen particularmente adecuados para una variedad de tareas, desde alimentar maquinaria pesada hasta alimentar generadores. Las escobillas y el conmutador de estos motores desempeñan un papel crucial en su funcionamiento, ya que contribuyen a una rotación suave y un deslizamiento limitado. Los cojinetes brindan soporte continuo, lo que garantiza la longevidad del motor, mientras que el aislamiento, la carcasa y la base forman una carcasa sólida que proporciona una cubierta protectora y soporte adicional para los componentes internos. En este artículo, revisamos estos aspectos esenciales de los motores de derivación de CC y destacamos las características que contribuyen a su rendimiento y confiabilidad excepcionales.
Características
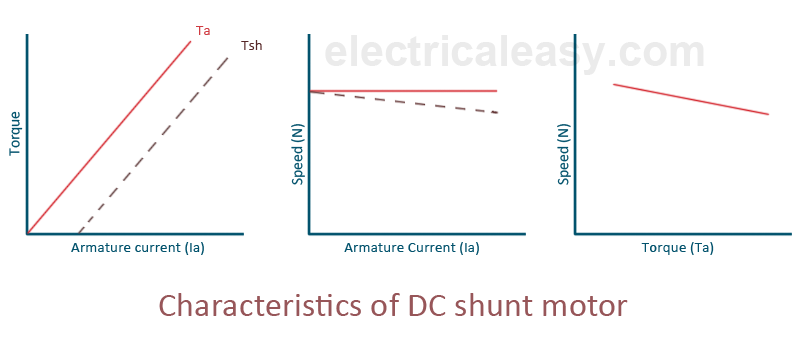
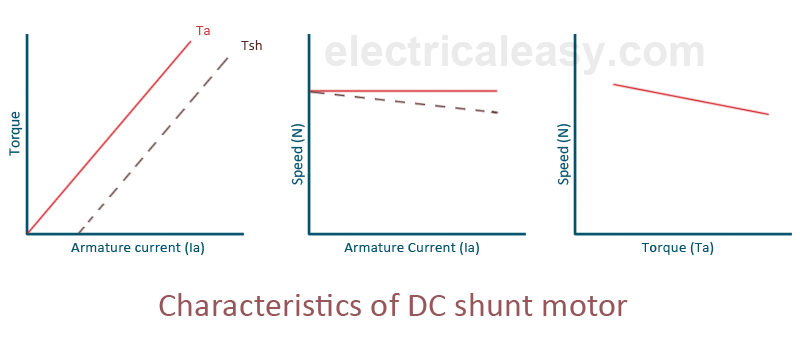
Las tres características importantes de la derivación son
Característica de par vs. corriente de armadura (T A /I A )
Sabemos que en un motor DC T A ∝ΦI A . El flujo Φ es continuo si ignoramos la reacción del inducido porque el motor opera con una fuente de voltaje directo. Por lo tanto, se dibuja la curva entre el par V. S. La corriente de la armadura es una línea recta que pasa por el origen, como se muestra en la figura. El par del eje (T Sh ) es menor que el par del anclaje y se muestra mediante una línea de puntos en la figura. De esta curva queda claro que se requiere una corriente muy grande para iniciar una carga pesada. Por lo tanto, el motor de derivación de CC no debe arrancarse a plena carga.

Par (Ta)
El par se refiere a la fuerza de rotación o par que produce un motor. En un motor de CC, el par es generado por el estator (devanado de campo) y el campo magnético inducido en el rotor (devanado del inducido). Cuando la corriente fluye a través del devanado del inducido, crea un campo magnético que interactúa con el campo magnético del estator, lo que genera un par que impulsa la rotación del motor.
Corriente de armadura (Ia)
La corriente de armadura es la corriente eléctrica que fluye a través del devanado de armadura de un motor de CC. Es un factor decisivo para la intensidad del campo magnético y, por tanto, para el par generado por el motor.
Dueño de propiedad
La característica Ta/Ia generalmente se representa como un gráfico con el par (Ta) trazado en el eje Y y la corriente de armadura (Ia) trazada en el eje X. El diagrama proporciona información valiosa sobre el comportamiento, la eficiencia y el rango de operación del. motor.
Significado
La característica Ta/Ia es crucial para el análisis del motor porque ayuda a los ingenieros a determinar el punto de funcionamiento del motor bajo diferentes condiciones de carga. Al comparar los requisitos de torque de la carga con la capacidad de torque del motor a diferentes corrientes de armadura, se puede seleccionar un punto de operación apropiado para una eficiencia y rendimiento óptimos.
Control y protección
Comprender la característica Ta/Ia también es crucial para el control y la protección del motor. Los sistemas de control de motores pueden, por ejemplo, utilizar esta característica para regular la corriente del inducido y, por tanto, la salida de par del motor. Además, ayuda a determinar límites operativos seguros para evitar que el motor entre en áreas de inestabilidad o saturación.
Consideraciones de eficiencia
La característica Ta/Ia también evalúa la eficiencia global del motor. Operar el motor cerca del par máximo es generalmente más eficiente porque maximiza el par de salida y mantiene la corriente del inducido a un nivel manejable.
Velocidad V S. Característica actual de la armadura.

Velocidad (N)
La velocidad se refiere a la velocidad de rotación del eje del motor y generalmente se mide en revoluciones por minuto (RPM) o radianes por segundo (Rad/s). En un motor de CC, la velocidad depende directamente de la fuerza contraelectromotriz (EMF) generada y de la corriente de armadura aplicada. A medida que varía la corriente del inducido, la velocidad del motor también cambia en consecuencia.
Dueño de propiedad
La característica N/Ia generalmente se representa como un gráfico con la velocidad (N) trazada en el eje Y y la corriente de armadura (Ia) trazada en el eje X. Este gráfico proporciona información valiosa sobre el control de velocidad, la eficiencia y el rango de operación. el motor.
ralentí
Con corrientes de inducido muy bajas (a menudo cercanas a cero), el motor funciona a su velocidad máxima, la llamada velocidad de ralentí. En este rango, el par de salida del motor es insignificante porque no hay carga externa.
área lineal
A medida que la corriente del inducido aumenta desde el estado inactivo, la velocidad del motor disminuye linealmente. Este rango lineal corresponde al rango de funcionamiento normal del motor, donde puede proporcionar diferentes pares dependiendo de la corriente aplicada.
Región de saturación
De manera similar a la característica de par versus corriente de armadura, la característica N/Ia también tiene un rango de saturación. Con corrientes de armadura elevadas, la velocidad del motor disminuye más lentamente a medida que se acerca a un valor constante. Esta saturación se debe a que el motor alcanza su capacidad de par máxima y lucha por producir un par adicional con una corriente de armadura cada vez mayor.
Significado
La característica N/Ia es fundamental para comprender el control de velocidad del motor y su capacidad para mantener una velocidad constante en diversas condiciones de carga. Al analizar este gráfico, los ingenieros pueden determinar el punto de funcionamiento del motor y evaluar su idoneidad para aplicaciones específicas.
Consideraciones de carga
Cuando el motor está bajo carga variable, la característica N/Ia ayuda a determinar cómo responde la velocidad a los cambios en la corriente del inducido. Dependiendo de los requisitos de la aplicación, los ingenieros pueden ajustar la corriente de la armadura para lograr la velocidad deseada y controlar el rendimiento del motor.
Control y eficiencia
Los sistemas de control de motores pueden utilizar la característica N/Ia para regular la corriente del inducido y lograr objetivos de velocidad específicos. Además, comprender esta característica es fundamental para optimizar la eficiencia del motor, ya que operar en puntos específicos de la curva puede resultar en un mejor uso de la energía.
Velocidad V S. Torque de anclaje
Esta curva se traza entre la velocidad del motor y la corriente del inducido a diferentes amperios, como se muestra en la figura. Se puede ver en la curva que la velocidad disminuye a medida que aumenta el par de carga.
Velocidad (N)
Como se mencionó anteriormente, la velocidad se refiere a la velocidad de rotación del eje del motor, generalmente medida en revoluciones por minuto (RPM) o radianes por segundo (Rad/s). En un motor de CC, la velocidad es función del voltaje aplicado a la armadura y la fuerza electromotriz inversa (EMF) del motor, que a su vez está influenciada por la velocidad misma.
Par de armadura (Ta)
El par de armadura representa la fuerza de rotación mecánica generada por la armadura del motor. Resulta de la interacción entre el campo magnético generado por el estator (devanado de campo) y el campo magnético inducido por el flujo de corriente en el rotor (devanado del inducido).
Dueño de propiedad
La característica N/Ta generalmente se representa como un gráfico con la velocidad (N) trazada en el eje Y y el torque del inducido (Ta) trazado en el eje X. Este gráfico proporciona información valiosa sobre la relación velocidad-par del motor. lo cual es fundamental comprender su rendimiento en diversas condiciones de carga.
Significado
La característica N/Ta es crucial para comprender el equilibrio entre la velocidad y el par del motor, lo que afecta directamente el rendimiento y la eficiencia del motor en diversas condiciones de funcionamiento.
Control de velocidad y capacidad de carga
La característica N/Ta está estrechamente relacionada con el control de la velocidad del motor. Mide la capacidad de mantener una velocidad relativamente constante bajo cargas variables. La pendiente de la curva N/Ta indica el control de velocidad del motor. Los motores con un mejor control de velocidad pueden mantener una velocidad más constante a medida que cambian los requisitos de par.
Arranque y aceleración
La característica N/Ta también juega un papel importante durante las fases de arranque y aceleración del motor. Comprender esta relación ayuda a los ingenieros a diseñar motores que puedan manejar el par de arranque requerido y acelerar de manera eficiente en diversas condiciones de carga.
Selección del punto de funcionamiento
Al analizar la característica N/Ta, los ingenieros pueden determinar el punto de funcionamiento ideal del motor para una aplicación específica. La elección del punto de funcionamiento correcto garantiza que el motor cumpla con los requisitos de velocidad y par requeridos mientras funciona de manera eficiente.
Sobrecarga y protección
Comprender la relación velocidad-par es crucial para evitar sobrecargar el motor. Operar el motor más allá de su torque puede resultar en un consumo excesivo de corriente, sobrecalentamiento y posibles daños. Por tanto, la característica N/Ta ayuda a establecer mecanismos de protección adecuados para garantizar el funcionamiento seguro del motor.
Conclusión
Las características de los motores en derivación de CC los hacen indispensables en muchos entornos industriales y comerciales. Su capacidad para proporcionar un control suave de la velocidad, funciones prometedoras de arranque y parada y autorregulación los convierten en caballos de batalla confiables en máquinas eléctricas. Comprender estas características permite a los ingenieros y técnicos aprovechar todo el potencial de los motores de derivación de CC y utilizarlos de manera efectiva en diversas aplicaciones e industrias.
Preguntas frecuentes
¿Cuáles son las principales características de un motor shunt de CC?
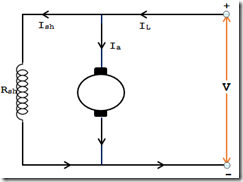
Las principales características de un motor en derivación de CC incluyen velocidad constante, par de arranque moderado y funcionamiento relativamente estable bajo diferentes cargas y voltajes de suministro. Estos motores tienen devanados de campo separados que permiten un control independiente de las corrientes de campo y de armadura.
¿Cuál es la diferencia entre un motor en derivación de CC y un motor en serie?
La principal diferencia entre un motor en derivación de CC y un motor en serie son los devanados de campo. Mientras que el motor en derivación tiene un devanado de campo en paralelo, el motor en serie tiene un devanado de campo en serie. Esta diferencia en la configuración da como resultado diferentes características de velocidad y par.
¿Cuál es la ecuación para el control de velocidad de un motor en derivación de CC?
El control de velocidad de un motor en derivación de CC se puede lograr mediante la siguiente ecuación: Velocidad ∝ (tensión de alimentación – caída de tensión debido a la retroalimentación del inducido) / vueltas del devanado de campo.
¿En qué se diferencia un motor compuesto de un motor de derivación en términos de reducción de velocidad bajo carga elevada?
Un motor compuesto, a diferencia de un motor en derivación, ofrece una mejor reducción de velocidad bajo cargas elevadas debido a la presencia de devanados de campo en serie y en derivación. Esta configuración de devanado adicional proporciona un mayor par de arranque y un mejor control de velocidad bajo cargas variables.
¿Cuáles son los beneficios de utilizar un motor de derivación de CC en una aplicación específica?
Una de las principales ventajas de utilizar un motor de derivación de CC en una aplicación específica es su capacidad para mantener una velocidad constante incluso bajo cargas variables. Esta propiedad lo hace adecuado para accionar máquinas que requieren una rotación suave y constante, como cintas transportadoras o laminadores.







