
Este tutorial explica cómo conectar el motor de CC con el Beaglebone negro, donde el motor de CC actúa como un dispositivo actuador. Debido a una corriente insuficiente, no es posible accionar el motor directamente desde BBB y, por lo tanto, se requiere un controlador IC de motor. El programa está escrito en script Python con la biblioteca Adafruit GPIO.
Herramientas necesarias :
- Hueso de beagle negro
- motor de corriente continua
- Controlador IC (es decir, L293D)
- presionar el botón
- resistencia de 1 kΩ
- Condensador de 0,1 uF
- tablero de prueba
- Conectores hembra a hembra
Configuración del entorno de software
Instale la última versión de Python en BBB como se explica en el tutorial Cómo crear el primer programa de Python con Beaglebone Black. Instale la biblioteca Adafruit python-GPIO llamada adafruit_BBIO.
Laboral
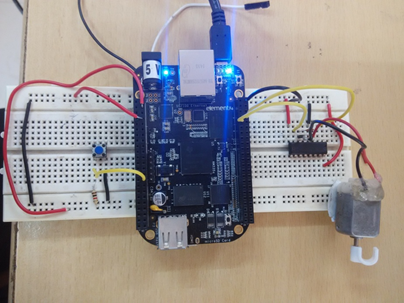
Conecté el motor de CC y el interruptor con el pin GPIO del Beaglebone Black. Cuando se ejecuta el script, entra en un bucle continuo. Una pulsación del interruptor comenzará a girar el motor en el sentido de las agujas del reloj, mientras que otra pulsación lo apagará. Presione Ctrl+C para detener la ejecución del programa en la terminal de comando SSH.
Descripción
Primero preparemos la conexión del circuito. Tome una placa de pruebas y suministre VCC y tierra desde BBB a la línea de la placa de pruebas. L293D funciona al menos a 4,5 V, mientras que Switch y GPIO funcionan a 3,3 V. BBB tiene un sistema en chip de 5 V y un conector de clavija de 3,3 V, por lo que puede tomar ambos suministros de Beaglebone Black. El sistema consume 5 V para L293D y 3,3 V para el interruptor y GPIO.
En un lado de la placa de pruebas, conecte la alimentación de 3,3 V desde el pin número 3, tercio del encabezado P9 y tierra desde el pin número 2 y el encabezado P8. Por otro lado, conecte el sistema de alimentación de 5 V al pin número 8 del encabezado P9 y haga conexión a tierra con el pin número 2 del encabezado P8.
El pulsador tiene dos terminales. Cualquiera de ellos se conecta a tierra. Suministre una resistencia VCC de 3,3 V a 1 k ohm a otro terminal de botón. Extremo común de resistencia y botón, conectar con el pin número 30 del cabezal P9.
L293D es un IC controlador de motor que le permite conducir el motor en ambas direcciones. El motor de CC tiene una alta capacidad de corriente, pero el pin BBB GPIO no puede generar suficiente corriente para accionar el motor de CC. L293D IC supera este problema y es necesario para la interfaz entre BBB y el motor de CC. El L293D también protege el BBB de daños debido a la contrafem generada por el motor de CC.
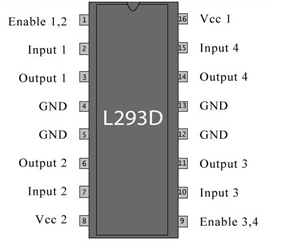
La salida BBB está conectada a la entrada L293D. Los pines número 8 y 9 del cabezal P8 actúan como terminales positivo y negativo del motor respectivamente. Tome la entrada de estos pines y conéctela con el pin input1 ( segundo pin de L293D) y el input2 ( séptimo pin de L293D) de L293D respectivamente. Conecte el motor de CC entre el pin de salida 1 ( tercer pin de L293D) y el pin de salida 2 ( sexto pin de L293D) de L293D. Suministre 5 V desde el sistema al pin VCC (pin 16 del L293D) y al VSS (pin 8 del L293D) del L293D. VCC es la fuente para la traducción lógica interna en L293D y VSS es la fuente de alimentación para el controlador de 5V.
Conecté un condensador de 0,1 uF entre los terminales de salida 1 y 2 para alineación y protección contra contraelectromotriz. Suministre energía al Beaglebone negro conectándolo a la PC mediante un cable USB. Ahora tu circuito está preparado.
Abra la terminal de comandos y acceda a Beaglebone black a través de SSH como se explica en el tutorial que comienza con Beaglebone black. Cree un nuevo archivo usando el comando reproducir con extensión .py (es decir, led.py). Abra el archivo con cualquier editor de texto (es decir, nano, vim, etc.) y escriba el código en lenguaje Python.
Configuración de pines GPIO
Importe la biblioteca GPIO desde la biblioteca negra de adafruit Beaglebone llamando a la siguiente línea en el programa:
importar Adafruit_BBIO.GPIO como GPIO
Configuración y función de GPIO que ya he explicado en el tutorial Interfaz LED con Beaglebone Black y conmutador interconectado con Beaglebone black .
Ejecute el script en la terminal:
Ingrese el siguiente comando con el nombre del archivo en el símbolo del sistema:
nombre del archivo python.py
es decir, Python dcMotor.py







