
PWM, en palabras simples, cambia el voltaje de salida en un pin específico al que se aplica variando el ciclo de trabajo de la forma de onda de salida. La frecuencia y el ciclo de trabajo de la señal PWM se pueden variar fácilmente utilizando los temporizadores del microcontrolador 8051. La siguiente figura le informará sobre las señales PWM y el ciclo de trabajo. El ciclo de trabajo de la señal original varía en el siguiente diagrama.
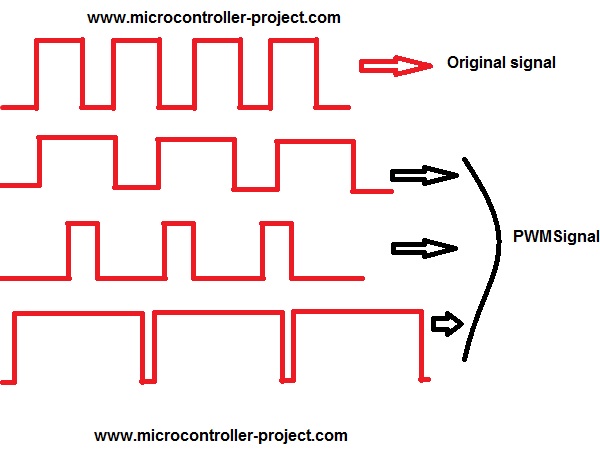
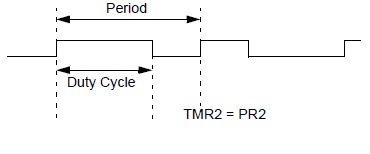
¿Qué es exactamente el ciclo de trabajo?
Control de velocidad del motor con microcontrolador 8051 – Requisitos del proyecto
- Microcontrolador 8051 (89c51 o 89c52)
- Cristal (11,0592 MHz)
- Condensadores 2 (33 pf)
- 9 pulsadores
- Motor CC – Ventilador (motor de juguete pequeño)
- Fuente de alimentación (5v)
- L293D (controlador de motor de CC)
Ahora bien, ¿cómo generar estos retrasos utilizando los temporizadores del microcontrolador 8051 (89c51,89c52)? Hay dos temporizadores en el microcontrolador 89c51, Timer-0 y Timer-1. Puede utilizarlos con fines de retraso o para contar un evento, etc. Puede utilizar estos temporizadores en cuatro modos. Los estoy usando en modo de 16 bits. Para obtener más información sobre los temporizadores, sus modos e inicialización, siga el tutorial.
- Temporizadores de microcontrol 8051 (89c52,89c51)
8051(89c52,89c51) son microcontroladores de 8 bits. Pero puedes usar tus temporizadores como de 16 bits. Para cargar valores de 16 bits en temporizadores se utilizan dos registros THx y TLx asociados a los temporizadores. Donde THx representa el byte alto del temporizador y TLx representa el byte bajo del temporizador (nota x es 0 o 1 dependiendo del temporizador que desee utilizar). Aquí estoy usando Timer-0, así que usaré los registros TH0 y TL0.
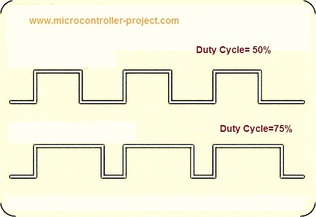
Mi ciclo de trabajo base es de 200 us, lo que significa que a 100 us el ciclo de trabajo será del 50 %. Un ciclo de trabajo del 50% significa que las señales positivas y negativas tienen la misma duración (tiempo). Puedes ver dos ondas sinusoidales (digitales) con ciclos de trabajo del 50 % y 75 % en la figura de la izquierda. Note la diferencia entre las dos ondas.
Calculé el retraso para 00, 20 us, 40 us, 100 us, 160 us, 180 us, 500 us, 800 us y 100 us y cargué los valores obtenidos por el resultado en los registros TH0 y TL0. Las fórmulas para calcular el retraso se dan a continuación con un ejemplo.







