
Este tutorial le enseñará cómo controlar un automóvil Robo utilizando cualquier dispositivo con Wifi.
Componentes necesarios:
1. Módulo Wi-Fi ESP 8266Acerca de ESP8266
ESP 8266 es lo último en Internet. Es un módulo Wifi un poco más grande que una moneda de 1 Re. Bueno, no es por eso que es famoso. Lo que lo ha hecho muy popular entre los entusiastas de la electrónica es su costo increíblemente bajo. Lo compré por sólo $5 (~300 Rs). Un Arduino junto con un escudo Wifi costaría 10 veces el costo de este módulo.
Higo. 1: Imagen que muestra los módulos Wi-Fi ESP8266
Se puede interconectar con cualquier microcontrolador mediante comunicación USART, lo que significa que sólo necesita los pines RX y TX. Recientemente se ha añadido otra pluma a la gorra. El desarrollador ha publicado los archivos SDK del módulo y, por lo tanto, incluso el módulo se puede reprogramar y sus pines GPIO se pueden usar de forma independiente sin ningún microcontrolador adicional. Pero eso está más allá del alcance de este tutorial. Estaríamos usando el módulo junto con Arduino UNO.
Hacer un adaptador de placa de pruebas para el módulo ESP8266:
El problema con la característica física del módulo es que no se puede conectar directamente a una placa. Entonces decidí hacer un adaptador que se usará para conectar el módulo a una placa de pruebas. Estas son las piezas que necesitarías para hacer el adaptador:
Figura 2: Imagen que muestra los componentes necesarios para fabricar el adaptador de placa de módem ESP8266
Comience soldando el conector hembra a la PCB. Suelde primero los pines de las esquinas para que el cabezal encaje correctamente en la PCB. Luego suelde los 4 pines restantes.

Fig. 3: Imagen que muestra el PCB del adaptador de placa soldado para adaptarse al conector hembra del módem ESP8266
Luego coloque los conectores macho en el lado opuesto de la PCB y sueldelos con cuidado a la PCB.

Figura 4: Imagen que muestra el conector macho colocado en el adaptador de placa de pruebas del módem ESP8266
Después de soldar, puede quitar la pieza de plástico negro adherida al conector macho y comenzar a soldar cada pin macho al pin hembra correspondiente. Al final te quedaría algo como esto:

Fig. 5: Imagen que muestra el conector macho soldado al adaptador de placa de módem ESP8266
Una vez que haga esto, puede conectarlo a una placa y conectarle el módulo ESP 8266 fácilmente.
Aquí hay un video tutorial detallado que muestra el proceso: (Opcional)

Figura 6: Imagen que muestra el adaptador de placa de pruebas del módem ESP8266 colocado en una placa de pruebas

Figura 7: Imagen que muestra el módulo Wi-Fi ESP8266 colocado en la placa
Comandos AT para ESP 8266:
|
Dominio |
Descripción |
|
AT+GMR |
Para conocer la versión del firmware |
|
AT+PR |
Para restablecer el módulo |
|
MODO AT+CW |
Para configurar el modo de funcionamiento, es decir, como punto de acceso o modo de estación o ambos. |
|
EN+CWLAP |
Para ver la lista de AP disponibles |
|
AT+SERVIDOR CIP |
Para configurar como servidor |
|
AT+CIPMUX |
Para elegir entre conexiones únicas o múltiples |
|
EN+CIPSEND |
Para configurar el número de canal, la longitud de los datos y enviar datos a través de WiFi |
|
AT+CIPCLOSIS |
Para cerrar la conexión |
Servidor en ESP 8266:
Enviaremos una interfaz web (una página HTML) a cualquier dispositivo (por ejemplo, un teléfono celular con Wifi) conectado al módulo Wifi. El código de la página HTML lo proporcionaría Arduino. Y además, Arduino decodificaría la solicitud del dispositivo y controlaría los motores en consecuencia. Como el módulo Wifi también puede funcionar como punto de acceso, no necesitamos un enrutador inalámbrico adicional para el proyecto. Si no tiene idea acerca de las páginas HTML, vaya a mi proyecto "Control de dispositivos a través de Wifi y Ethernet" y aprenda los conceptos básicos. Aquí está el algoritmo a seguir para configurar un servidor en ESP 8266:Algoritmo:
– Pruebe el módulo usando el comando “AT” – Configure el modo de funcionamiento mediante el comando “AT+CWMODE=Configuración de hardware:
Reúne todas las piezas que se muestran en la imagen.

Figura 8: Imagen que muestra los componentes necesarios para fabricar el robot.
Conecte los motores al chasis y luego las ruedas al eje.

Figura 9: Imagen que muestra la estructura metálica del robot conectada al motor DC
Utilice algunos tornillos y tuercas para fijar la rueca.

Figura 10: Imagen que muestra ruedas conectadas a motores de CC en el robot

Figura 11: Imagen de la rueda giratoria unida a la parte delantera del Robot Car

Figura 12:
Explicación del código:
– Definir los pines 8, 9, 10 y 11 como pines de salida y comunicación serie con una velocidad de baudios de 9600 bps. – Enviar el comando “AT” al módulo. – Establezca el modo de operación en estación y punto de acceso usando el comando “AT+CWMODE=3” – Establezca el modo de conexión en múltiples conexiones enviando “AT+CIPMUX=1” – Ponga el módulo en modo Servidor y use el puerto predeterminado enviando “AT+CIPSERVER=1, 80” – Ingrese al bucle infinito y verifique las solicitudes entrantes de Wifi – Si se realizó una solicitud, lea la solicitud y almacene el número de canal donde se originó la solicitud. – Envíe el código de la página HTML al número de canal almacenado usando los comandos “AT+CIPSEND=Instrucciones de configuración
-Conecte todo según el diagrama del circuito y encienda todo el sistema.

Fig. 13: Prototipo de coche robótico sencillo
– Espere unos segundos a que se inicialicen Wifi y Arduino. Pasados unos 30 segundos, activa Wifi en tu dispositivo (móvil, tablet o portátil) y verás algunas redes disponibles.
– Puedes conectarte a tu red doméstica (que es “ Robots Recharged ” en mi caso y a eso me voy a conectar) o al propio punto de acceso (que es “ ESP_9F0F14 ” en mi caso. El SSID del módulo no es más que su nombre seguido de los últimos 6 caracteres de su dirección MAC)

Figura 14: Prototipo de circuito de control basado en Arduino montado en un automóvil robótico
– Luego abra su navegador e ingrese la dirección IP
1. Desde el módulo de la red doméstica si estás conectado a la red doméstica (como yo y en mi caso es 192.168.0.101 o 192.168.0.102 ) O 2. 192.168.1.4 si se conecta al punto de acceso denominado “ESP_<últimos 6 caracteres de la dirección MAC>” En un momento deberías ver una página como esta en tu navegador: Ahora haga clic en los enlaces y verá que el motor comienza a moverse. Si se mueven en la dirección incorrecta, verifique las conexiones y cámbielas si es necesario.
Figura 15: Captura de pantalla de conexiones Wi-Fi en un teléfono Android que muestra el punto de acceso del módulo ESP
– Puedes conectarte a tu red doméstica (que es “Robots Reloaded” en mi caso y a eso me conectaré) o al propio Punto de Acceso (que es “ESP_9F0F14” en mi caso. El SSID del módulo no es nada más es que su nombre seguido de los últimos 6 caracteres de su dirección MAC)
Código fuente del proyecto
#definir esp Serie
"); especialmente.imprimir("
ADELANTE
PARADA IZQUIERDA "); esp.print("DERECHACONTRARRESTAR
Creado por GANESH SELVARAJ para EngineersGarage.com
"); retraso(5000); esp.print(F("AT+CIPCLOSE=")); esp.println(ch_id);} void forward { digitalWrite(in1,HIGH); digitalWrite(in2,LOW); digitalWrite( en3,ALTO); escritura digital(en4,BAJO);}anular reversa {escritura digital(en1,BAJO); en2,BAJO); escritura digital(en2,BAJO); escritura digital(en4,BAJO);}void stop_bot {escritura digital(en1,BAJO);
Diagramas de circuito
| Diagrama de circuito-Arduino-ESP8266-Ased-Module-Wi-Fi-Controlled-Robotic-Car | 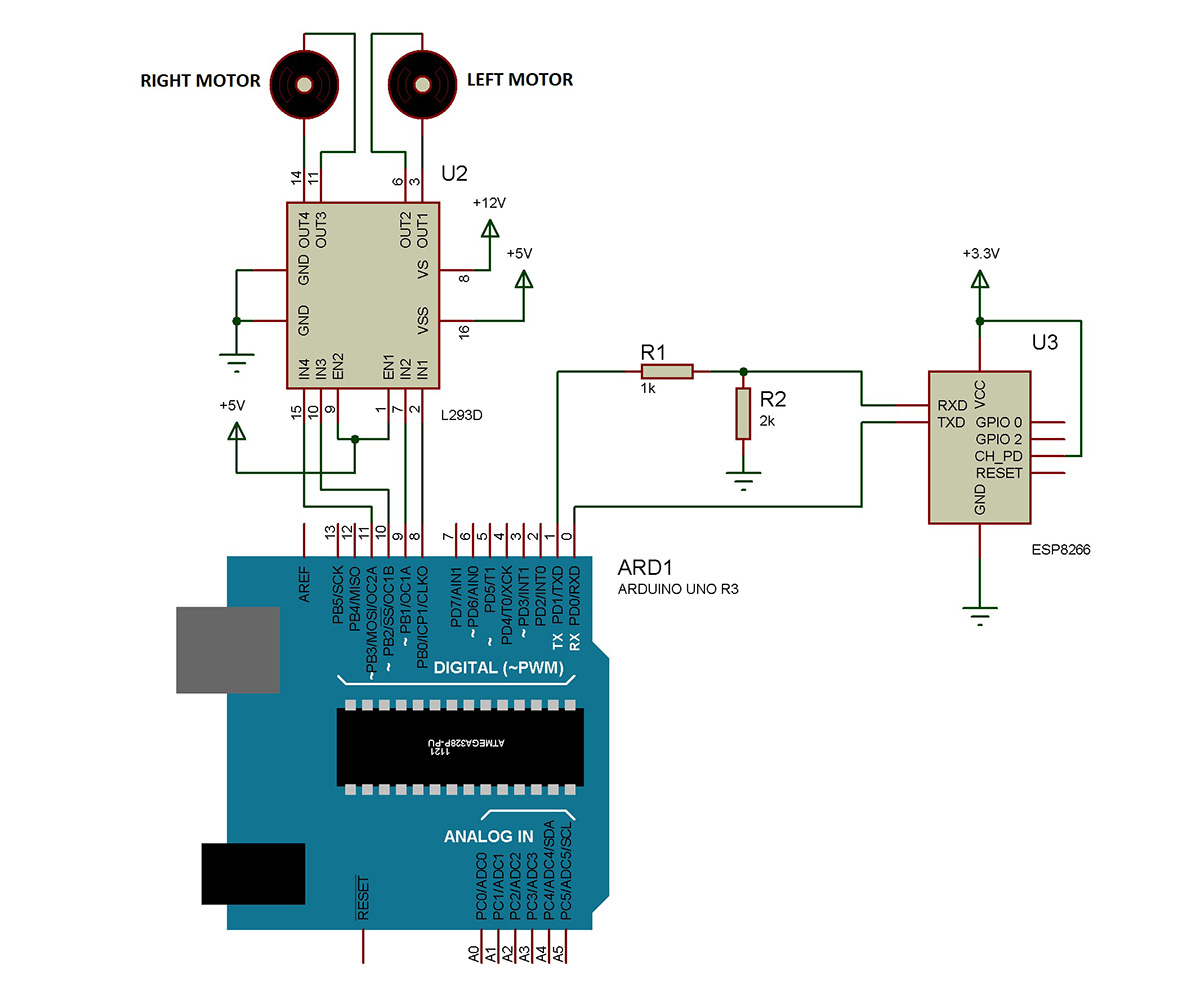 |







