REQUISITOS:
1. Microcontrolador (AtMega 16)DESCRIPCIÓN:
Los motores sin escobillas tienen resultados mucho más satisfactorios en comparación con los motores con escobillas. La diferencia básica entre ellos es que en un motor sin escobillas, el propio rotor contiene los imanes permanentes y los electroimanes se mueven hacia el estator, que es exactamente lo contrario de lo que se ve en los motores con escobillas. Es más preciso y también puede incluir la velocidad del motor en la ecuación. Esto hace que los motores sin escobillas sean más eficientes, ya que no se producen chispas, hay menos ruido eléctrico y no se desgastan las escobillas. Con los electroimanes en el estator, son muy fáciles de enfriar. Puedes tener muchos electroimanes en el estator para un control más preciso. La única desventaja de un motor sin escobillas es su mayor costo inicial, pero a menudo es posible recuperar este costo mediante una mayor eficiencia durante la vida útil del motor. Ahora, cuando hablamos de controlar estos motores, me gustaría introducir un nuevo término, es decir, ESC, que significa controladores electrónicos de velocidad. Como sugiere el nombre, controlan la velocidad de los motores de CC sin escobillas mediante algún protocolo electrónico. Estos ESC necesitan un comando para seguir funcionando. En este proyecto estoy enviando estos comandos usando un microcontrolador, AtMega 16. Debes estar pensando ¿cuáles serían estos comandos? No se preocupe, si ya ha trabajado con servomotores, podrá controlar estos motores BLDC muy fácilmente. La mayoría de los ESC necesitan una frecuencia de 50 Hz, es decir, un tiempo de ciclo de 20 ms y la velocidad depende del ciclo de trabajo proporcionado. 1ms reducirá su velocidad al mínimo o incluso lo detendrá (depende del modelo de ESC) mientras que un pulso de 2ms hará que el motor funcione a su máxima velocidad. Los valores intermedios proporcionan una variación de velocidad.
|

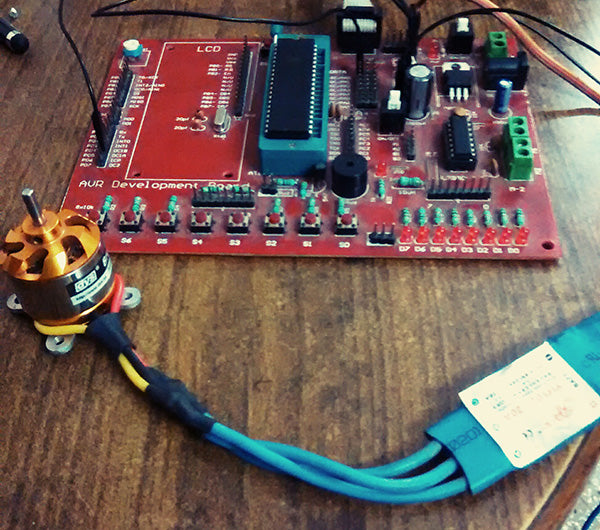
Fig. 1: Prototipo de controlador de motor DC sin escobillas basado en AVR ATMega16
|

|
Figura 2:
Imagen del motor DC sin escobillas
|

Figura 3: Imagen del controlador electrónico de velocidad
Déjame contarte algo sobre las conexiones involucradas aquí. Un ESC necesita una fuente de energía para funcionar (esta fuente también suministrará energía al motor). Utilicé una batería de polímero de litio (11,1 V) aquí. En el lado de entrada, además de la necesidad de la batería, se necesita una señal que conecté al pin OC1A (PD5). Esta es la salida de Timer1_A; Hablaré de esto más tarde. Luego viene la sección de salida con 3 pines A, B y C. Estos pines corresponden a los 3 pines del motor BLDC. El motor en uso viene con tres cables de colores: amarillo, negro y rojo. Necesita conectar A con amarillo, B con negro y C con rojo. Si encuentra que su motor gira en la dirección opuesta a la que desea, simplemente intercambie los cables amarillo y rojo. Timer1 en AtMega 16 es un temporizador de 16 bits, lo que significa que puede contar hasta 65,535 comenzando desde cero. La razón por la que utilicé este temporizador y no el temporizador0 o el temporizador2 es que son temporizadores de 8 bits y pueden contar hasta 255. Cuando queremos un ciclo de 20 ms, necesitamos un valor de 20.000 cuentas (0-19999). Como puede ver, este valor no se puede acomodar en ningún temporizador de 8 bits, así que cambié a uno de 16 bits. Una gran ventaja de los temporizadores de 16 bits es que puede establecer el valor superior entre 0 y 65535. El temporizador 1 se divide en dos temporizadores A y B individuales de 16 bits. Este proyecto utiliza la parte 'A' del temporizador 1. Además, los valores correspondientes a 1 ms y 2 ms son 1000 y 2000 respectivamente. Al mirar el video notarás que controlé la velocidad usando un potenciómetro (potenciómetro de 10K). Este potenciómetro proporciona el valor analógico que lee el pin PORTA_0. Este valor luego determina el valor entre 1000 y 2000, como se analizó anteriormente. Sobre prácticamente lidiar con el motor que usé; En su hoja de datos estaba escrito que requiere un pulso de 1 ms durante unos segundos o hasta que el motor responda con una señal (lo entenderás mejor cuando veas la parte del video). Esto indica que el motor ahora está listo para los comandos discutidos anteriormente.
FORMAS:
• Estos motores desempeñan el papel más importante en la fabricación de cualquier vehículo aéreo como vehículos aéreos no tripulados o cuadricópteros, etc. • BLDC también se puede ver en automóviles y aviones RC (control remoto).Código fuente del proyecto
#incluir
#incluir
vacío principal
{
valor entero ;
ADCinit;
TCNT1=0;
TCCR1A =(1<
TCCR1B =(1<
DDRD =(1<<5);
ICR1=19999;
OCR1A=1000;
mientras (1)
{
valor=read_adc(0);
OCR1A=valor+1000;
}
}
Diagramas de circuito
| Diagrama de circuito-AVR-ATMega16-Controlador de motor CC sin escobillas |  |







