Este es el proyecto más sorprendente y comercialmente viable en el que la cámara web conectada a su computadora se moverá en cuatro direcciones, de arriba a abajo y de izquierda a derecha, con la ayuda de la punta de sus dedos.
El software escrito en VC++ controlará dos motores de CA diferentes con la ayuda del mouse de su computadora. El movimiento hacia adelante y hacia atrás de estos motores moverá la cámara web hacia arriba y hacia abajo o de izquierda a derecha, según su elección. Hay dos modos para mover la cámara en cuatro direcciones. 1) Automático y (2) manual. En modo automático, la cámara se mueve de izquierda a derecha, arriba y abajo en una secuencia de programa de usuario, mientras que en modo manual se mueve dependiendo del comando del usuario.
Descripción general:-
Hay tres partes básicas del proyecto. (1) mecánico (2) hardware y (3) software.
La parte mecánica es la unidad de la cámara que consta de la lente de la cámara, dos motores de CA con ciertas especificaciones y un mecanismo interno para girar la lente. Las especificaciones del motor son
Tipo de motor: – Motor de CA reversible
Tensión máxima aplicada: – 230 VCA
RPM nominales máximas: – 5 RPM a 230 VCA
La parte de hardware es el circuito de accionamiento del motor de CA conectado al puerto LPT de la PC que cambiará la alimentación suministrada al motor y lo moverá en consecuencia.
La parte del software es la interfaz real entre el usuario y la cámara que generará varias señales a través del LPT y hará girar dos motores de CA.
Nota: - La pieza mecánica está lista y disponible en el mercado, por lo que no discutiremos esto en profundidad.
Hardware y software
Sección de hardware: –
El circuito está diseñado para hacer girar ambos motores de CA en cualquier dirección. Para cada motor tenemos dos relés, uno para encender o apagar el motor y el segundo para cambiar de dirección. Por lo tanto, se conectan cuatro relés de conmutación (C/O) a los pines D0-D3 del LPT a través del chip controlador de corriente ULN2003A. Todos los relés son de 12 VCC, 300 ohmios (tipo terrón de azúcar, montaje en PCB). Uno de los terminales de la bobina de todos los relés está en cortocircuito y conectado al suministro de 12 V. El segundo terminal está conectado a la salida del chip ULN. Los contactos del relé (C, NC, NO) están conectados como se muestra en la figura del Diagrama de circuito, Guía 1.
Aquí los relés RL1 y RL3 sirven para encender/apagar los motores y RL2 y RL4 sirven para cambiar de dirección. ACM1 se utiliza para mover la cámara hacia la izquierda y hacia la derecha, mientras que ACM2 mueve la cámara hacia arriba y hacia abajo. Por lo tanto, al cambiar estos relés, la cámara se moverá en las cuatro direcciones. La siguiente tabla le dará una idea de cómo un software puede mover la cámara usando el puerto LPT
|
Relé(s) |
Pines de datos |
Movimiento de cámara |
numero hexadecimal |
|
RL1 |
D0 |
De izquierda a derecha |
01h |
|
RL1 y RL2 |
D0-D1 |
De derecha a izquierda |
03h |
|
RL3 |
D2 |
De abajo para arriba |
04h |
|
RL3 y RL4 |
D2-D3 |
De arriba a abajo |
0 canales |
Sección de software: –

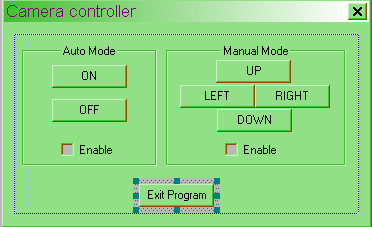
Como se ilustra primero, existen dos modos automático y manual, por lo tanto, en el modo automático el software mueve la cámara en una secuencia preprogramada y en el modo manual el usuario (operador) puede mover la cámara desde el teclado o el mouse. La ventana de la aplicación se ve así.
Hay dos cuadros de grupo, siete botones y dos casillas de verificación. Aquí están las configuraciones
|
Artículo |
Propiedad |
Contexto |
|
Cuadro de grupo 1 |
YO IBA |
IDC_AUTO |
|
Cuadro de grupo 2 |
YO IBA |
IDC_MAN |
|
Botón 1 |
YO IBA |
IDC_UP |
|
Título |
ARRIBA |
|
|
Botón 2 |
YO IBA |
IDC_DWN |
|
Título |
ABAJO |
|
|
Botón 3 |
YO IBA |
IDC_LEFT |
|
Título |
IZQUIERDA |
|
|
Botón 4 |
YO IBA |
IDC_RGHT |
|
Título |
BIEN |
|
|
Botón 5 |
YO IBA |
IDC_XIT |
|
Título |
SALIDA |
|
|
Botón 6 |
YO IBA |
IDC_ON |
|
Título |
ACERCA DE |
|
|
Botón 7 |
YO IBA |
IDC_OFF |
|
Título |
APAGADO |
|
|
Casilla de verificación 1 |
YO IBA |
IDC_CHECK1 |
|
Título |
Permitir |
|
|
Casilla de verificación 2 |
YO IBA |
IDC_CHECK2 |
|
Título |
Permitir |
Después de completar el diseño, ahora tenemos que adjuntar el código a estos botones. Aquí tenemos dos botones de activación, por lo que solo se activará un modo a la vez. A medida que actives un modo, el segundo se desactivará. En modo manual, los cuatro botones dados enviarán el número hexadecimal proporcionado en la tabla anterior a la dirección del puerto LPT que es 0378 para que el relé específico se energice y gire el motor.
El modo automático es un poco diferente. El movimiento de la cámara está preprogramado. La cámara se mueve 150 grados. De izquierda a derecha y 150 grados. De arriba a abajo. Ahora que el motor tiene 5 RPM, significa que gira 1800 grados. En 60 seg. Entonces, en 1 segundo, el motor gira 30 grados. Así, para completar 150 grados, se necesitan 5 segundos.
Ahora el movimiento se divide en 6 etapas.
- De izquierda a derecha significa 5 segundos (01h)
- De derecha a centro significa 2,5 segundos (03h)
- Del centro a la cima nuevamente 2,5 segundos (04h)
- De arriba a abajo. 5 seg (0Ch)
- De abajo hacia el medio. 2,5 segundos (04h)
- Desde el centro hacia la izquierda nuevamente 2,5 segundos (03h) y este ciclo se repite
Para ello utilizamos un contador que contará en intervalos de 0,5 segundos. El tiempo total del ciclo es de 20 segundos, lo que significa que el contador cuenta hasta 40. El programa supone que cuando se activa el modo automático, las cámaras están en la posición más a la izquierda.
Diagramas de circuito
| cámara web-1 | 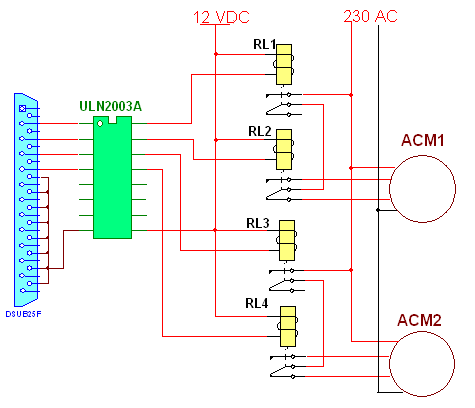 |