Ya hemos conocido los diferentes componentes que componen un robot industrial o un brazo robótico. También analizamos los diferentes tipos de robots utilizados en la industria. Uno de los términos más importantes utilizados en el contexto de los robots y su diseño es grado de libertad. En este artículo hablaremos del grado de libertad en los robots. ¿Por qué es tan importante y cómo se calcula?
¿Cuál es el grado de libertad?
El grado de libertad es un factor extremadamente importante en robótica, utilizado para definir las capacidades de movimiento físico de un robot. Un robot es esencialmente una combinación de múltiples mecanismos donde cada mecanismo se compone de un conjunto de eslabones y articulaciones. Como ya se ha comentado, existen diferentes tipos de articulaciones que se utilizan en la construcción de un robot. Las juntas de par inferior más comunes incluyen la junta de revolución, la junta prismática, la junta helicoidal, la junta cilíndrica, la junta esférica y la junta universal. Cada articulación tiene su propio grado de libertad. Las juntas giratorias, helicoidales y prismáticas tienen 1 DoF, las juntas cilíndricas y universales tienen 2 DoF y las juntas esféricas tienen 3 DoF. Cuando se determina el grado de libertad de una articulación, generalmente se refiere al número de ejes que la articulación proporciona movimiento a los eslabones adjuntos.
Cuando se conectan varias articulaciones para formar un brazo robótico o un robot industrial, el grado de libertad resultante es diferente. En el contexto de un robot, el grado de libertad es el número de variables o parámetros independientes que definen el movimiento o la configuración del robot. DoF representa la cantidad de formas en que un robot puede moverse o posicionarse en su espacio de trabajo. Cuanto mayor sea el grado de libertad, más flexible y adaptable será el robot. Un robot con una alta DoF puede realizar movimientos más complejos y realizar una variedad de tareas. Sin embargo, una mayor DoF implica más costos, complejidad y desafíos de control.
¿Cómo calcular el grado de libertad de un robot?
Puede que determinar el grado de libertad de un robot no sea tan fácil. Para ciertos tipos de robots, es bastante sencillo. Por ejemplo, un robot cartesiano siempre tiene 3 grados de libertad. Un robot escalar es 4-DoF. Aunque para otros tipos de robots y diseños de robots, no es tan sencillo. Si cada articulación del robot es independiente y no tiene restricciones ni dependencias, la DoF total del robot será la suma de la DoF de todas las articulaciones. Por ejemplo, si un robot tiene dos articulaciones de revolución y dos articulaciones prismáticas, todas independientes sin dependencias, el DoF total del robot es 4 (2 + 2), y cada articulación suma un grado de libertad. Generalmente, no todas las articulaciones son independientes y se les aplican algunas restricciones. Las dependencias conjuntas complican aún más la ecuación.
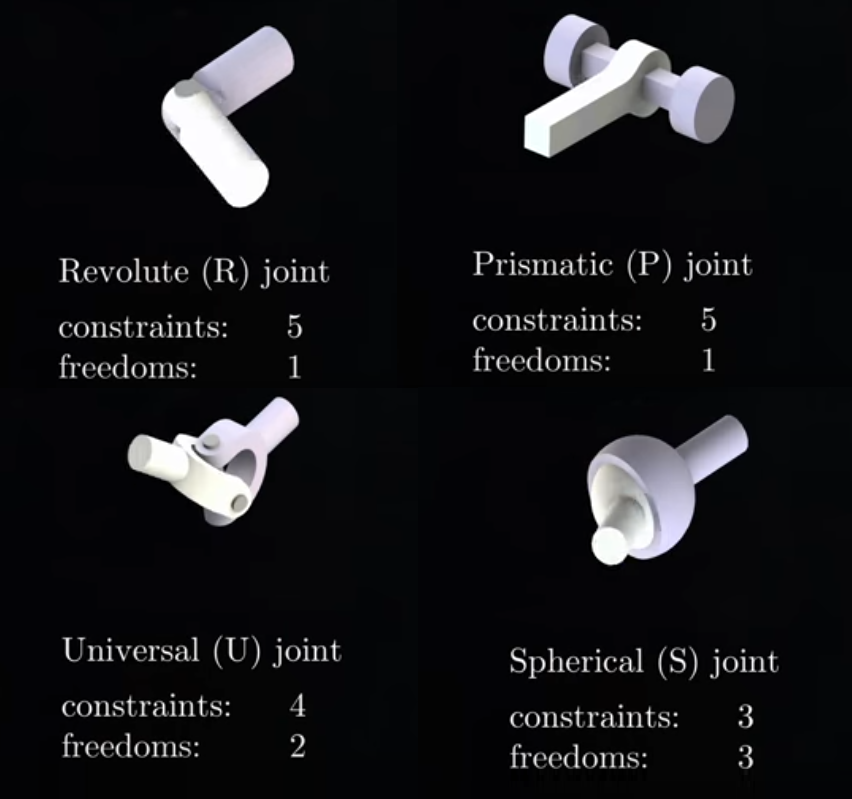
Figura 1.
Cada tipo de articulación tiene un cierto número de restricciones independientes. Por ejemplo, el número de restricciones independientes entre dos cuerpos rígidos planos para uniones de revolución y prismáticas es 2. El número de restricciones independientes entre dos cuerpos rígidos espaciales para uniones de revolución y prismáticas es 5. El número de restricciones independientes entre dos cuerpos rígidos espaciales para juntas helicoidales, cilíndricas, universales y esféricas es 5, 4, 4 y 3, respectivamente. El grado de libertad de una articulación específica es la diferencia entre el número de restricciones independientes y la suma de las libertades de los cuerpos. Según este cálculo, las juntas giratorias, helicoidales y prismáticas tienen 1 DoF, las juntas cilíndricas y universales tienen 2 DoF y las juntas esféricas tienen 3 DoF.
El grado de libertad de las uniones independientes se resume en la tabla 1 .
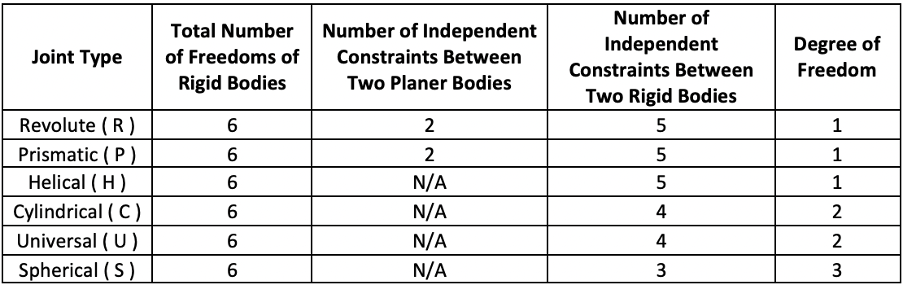
Tabla 1.
Como cada robot tiene un mecanismo diferente, el cálculo del grado de libertad puede ser diferente. Una forma común de determinar el grado de libertad de un robot es el criterio de Kutzbach y el criterio de Chebychev-Grubler, conocido como fórmula de Grubler. El criterio de Kutzbach se aplica únicamente al grado de libertad de movilidad de un mecanismo plano. Según el criterio de Kutzbach, para que un mecanismo plano o espacial sea móvil, es decir, que tenga un grado de libertad mayor que 0, el número de ecuaciones de restricción (C) debe ser mayor o igual a la diferencia en el número de enlaces. (L) del número de parámetros cinemáticos independientes (P).
C >= PL para que cualquier mecanismo plano o espacial sea móvil.
Según el criterio de Chebychev-Grubler, el grado de libertad del mecanismo viene dado por la siguiente ecuación ( Ecuación 1 ).
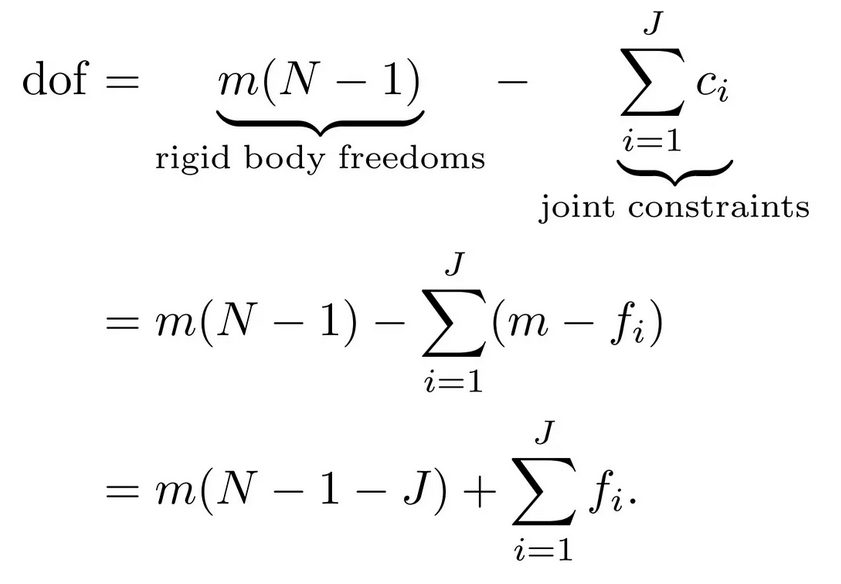
Ecuación 1.
Dónde:
m = grados de libertad de un solo cuerpo/eslabón, que es igual a 3 para un cuerpo rígido que se mueve en un plano y es igual a 6 para un cuerpo rígido que se mueve en un espacio tridimensional.
N = Número de enlaces/cuerpos incluyendo tierra
J = Número de juntas
Ci = Número de restricciones proporcionadas por la articulación i
fi = Número de libertades proporcionadas por la articulación i
Al aplicar el criterio de Chebychev-Grubler a un mecanismo plano, la ecuación para DoF es:
Grado de libertad = 3(L-1) – 2J – H
Dónde:
L = Número de enlaces
J = Número de juntas binarias
H = Número de pares más altos
Apliquemos el criterio de Chebychev-Grubler a algunos mecanismos planos que no tienen pares superiores para calcular el grado de libertad.
Para un mecanismo de tres barras de cadena cerrada como se muestra en la Figura 2 .
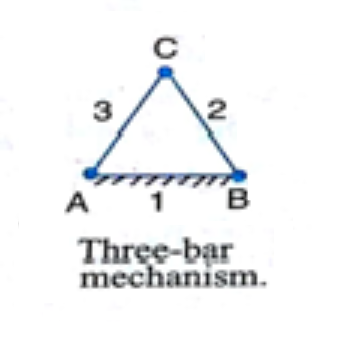
Figura 2.
Grado de libertad = 3(3-1)-2×3 = 0
Para un mecanismo de cadena cerrada de cuatro barras como se muestra en la Figura 3 .
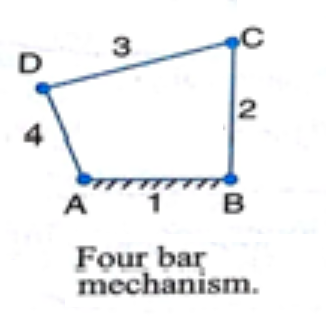
Figura 3.
Grado de libertad = 3(4-1)-2(4) = 1
Para un mecanismo de cadena cerrada de cinco barras, como se muestra en la Figura 4 .
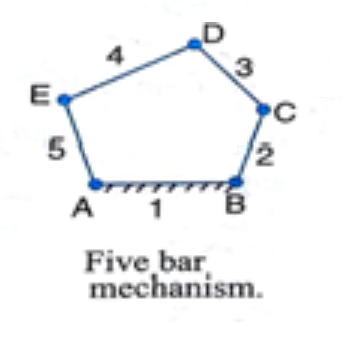
Figura 4.
Grado de libertad = 3(5-1)-2(5) = 2
Para un mecanismo de cadena cerrada de cinco barras con dos uniones ternarias, como se muestra en la Figura 5 .
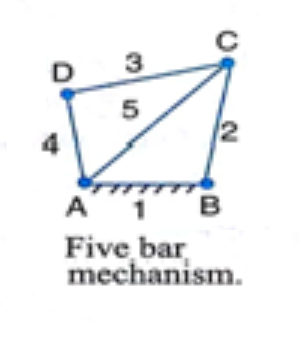
Figura 5.
Grado de libertad = 3(5-1)-2(6) = 0
Para un mecanismo de cadena cerrado de seis barras con cuatro uniones ternarias, como se muestra en la Figura 6 .
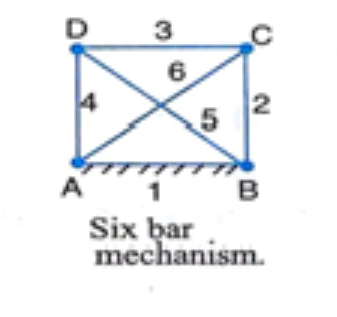
Figura 6.
Grado de libertad = 3(6-1) – 2(8) = -1
La Fórmula de Grubler sólo se puede aplicar a mecanismos que tengan juntas de 1 DoF, es decir, las juntas que forman el sistema robótico son de revolución, prismáticas o helicoidales. No aplica para mecanismos con uniones de 2-DoF o 3-DoF. La fórmula también se puede aplicar a mecanismos de cadena abierta. Por ejemplo, en la Figura 7 se muestra un mecanismo de cadena abierta con 3 juntas de revolución y una junta prismática.
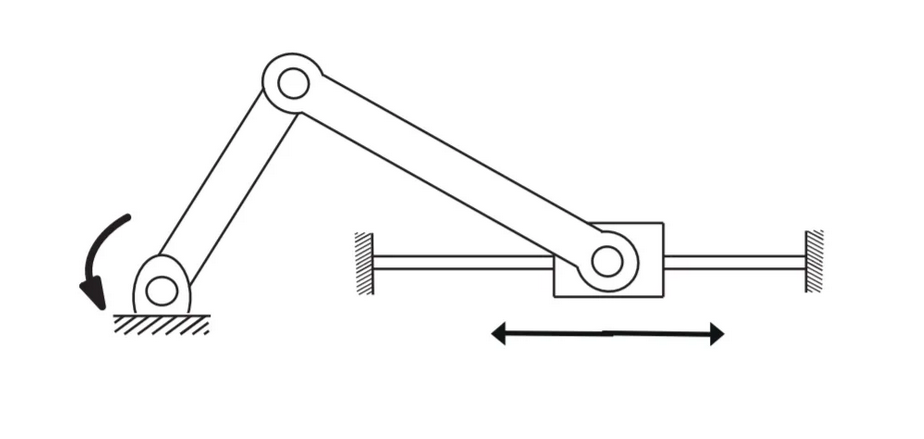
Figura 7. Mecanismo de cadena abierta con 3 juntas de revolución y una junta prismática.
Hay cuatro enlaces/cuerpos conectados por cuatro articulaciones, cada articulación tiene 1-DoF, por lo que según la fórmula de Grubler
Grado de libertad = 3 (4-1-4) + (1+1+1+1) = 1
La fórmula de Grubler no es aplicable cuando las uniones no son independientes. Por ejemplo, considere el siguiente mecanismo.
Al aplicar la ecuación de Grubler al mecanismo anterior ( Figura 8 ), obtenemos una DoF de 0.
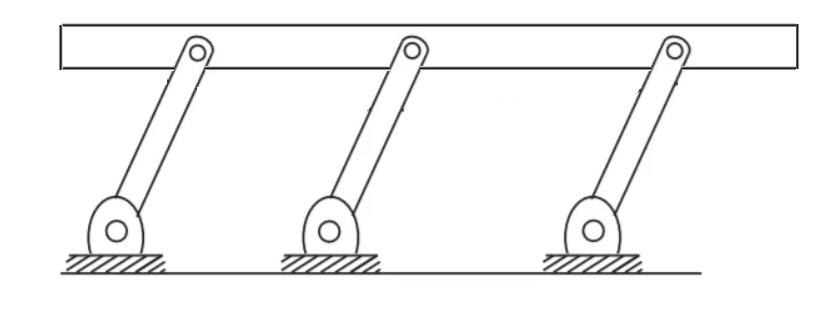
Figura 8. Mecanismo de cadena abierta con 3 juntas de revolución y una junta prismática con la ecuación de Grubler aplicada.
Grado de libertad = 3 (3-1-3) + (1+1+1) = 0
Pero se puede ver claramente que el mecanismo anterior tiene un grado de libertad igual a 1. Dado que la articulación intermedia en el mecanismo anterior no es independiente, la fórmula de Grubler no se aplica a ella.
Encontrar el grado de libertad para diseños de robots simples es fácil, ya que hay más uniones no independientes y más dependencias, determinar el grado de libertad de un robot móvil se vuelve cada vez más complejo.
Para simplificar, podemos reducir la mayoría de los diseños mecánicos robóticos a mecanismos de cadena abierta y de cadena cerrada, como se muestra en la Figura 9 .
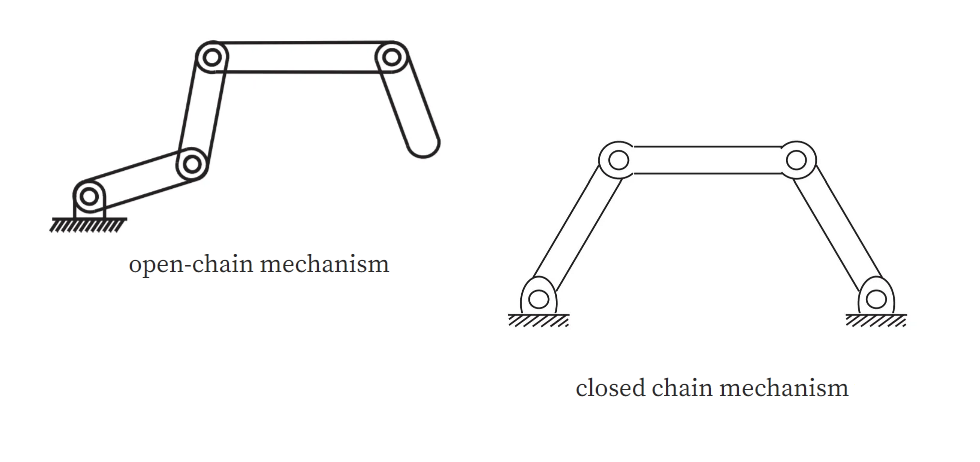
Figura 9.
Siempre que el robot tenga solo juntas de 1 DoF, como juntas de revolución, prismáticas y helicoidales, el grado de libertad del robot se puede calcular fácilmente utilizando la fórmula de Grubler. Como el robot involucra uniones no independientes, dependencias y uniones de 2-DoF y 3-DoF, los cálculos se vuelven más complicados.
¿Por qué es importante DoF?
Cada robot tiene una estructura mecánica diferente. Con los mismos enlaces se puede organizar un robot mediante diferentes articulaciones y de muchas formas. El grado de libertad de un robot afecta muchas áreas y juega un papel clave en la definición del desempeño del robot. Primero, DoF determina el rango y la complejidad de los movimientos que puede realizar un robot. Es un factor clave a la hora de decidir cómo los robots navegarán y manipularán objetos en diferentes entornos y entornos de trabajo. Un robot con mayor DoF puede acceder y manipular objetos desde muchos ángulos y orientaciones diferentes, lo que le permite realizar tareas más complejas.
En segundo lugar, la DoF es una consideración importante para determinar la adaptabilidad del robot a las tareas. Diferentes tareas requieren diferentes rangos de movimiento, ángulos de aproximación y orientaciones. Las tareas más simples se pueden realizar mediante tareas con una DoF más baja, mientras que las tareas más complejas requieren una DoF más alta. Además, el grado de libertad de un robot vuelve a ser un factor importante a la hora de determinar el espacio de trabajo del robot. Un robot con un DoF más alto no sólo tiene un espacio de trabajo más grande, sino que también puede utilizar el espacio de trabajo disponible de manera más eficiente. Por lo tanto, el grado de libertad es importante para determinar el espacio de trabajo accesible y la accesibilidad a los objetos en el espacio de trabajo accesible.
El grado de libertad también determina la redundancia cinemática y la resolución de redundancia del robot. El grado de libertad de un robot diseñado para una tarea prevista no debe ser mayor de lo necesario. Incluso una DoF innecesariamente alta puede suponer obstáculos para el movimiento de un robot, hacerlo menos eficiente energéticamente y perjudicar su estabilidad. El grado de libertad debe ser suficiente para aumentar la redundancia cinemática del robot, de modo que el robot pueda repetir movimientos de manera efectiva con una energía optimizada manteniendo una buena estabilidad y repetibilidad. El diseño del robot debe optimizarse para que su movimiento y postura coincidan con objetivos específicos.
El grado de libertad de un robot también afecta su control y planificación. A medida que aumenta el grado de libertad de un robot, se requieren algoritmos y técnicas de control más complejos para planificar, coordinar y controlar eficazmente múltiples grados de libertad. Planificar y controlar un robot con múltiples grados de libertad implica enfrentar desafíos como la planificación y generación de trayectorias, la prevención de colisiones y la coordinación conjunta.
En consecuencia, el grado de libertad de un robot juega un papel importante en la definición de su rango y alcance, adaptabilidad, repetibilidad, estabilidad, rendimiento, complejidad y eficiencia.