El modo de autoprogramación ( SPM ) es una característica que permite a un microcontrolador programar su propia memoria flash. Usando SPM, un microcontrolador puede programarse a sí mismo con un código SPM. SPM se usa comúnmente con códigos de cargador de arranque de microcontroladores que ayudan a programar el microcontrolador en serie. En el microcontrolador AVR, el SPM solo está disponible para el código que se ejecuta en el BLS de la memoria flash. Con la ayuda de SPM, un código en BLS puede reescribir la memoria flash de la aplicación en su totalidad o en parte. Incluso puedes reescribir tu propio código en la sección BLS.
SPM es un factor clave del código de Boot-Loader, ya que la función principal de Boot-Loader es cargar un código de aplicación en la sección flash de la aplicación. El Boot-Loader puede recibir código binario de otros chips de memoria, tarjetas SD o mediante el puerto serie del microcontrolador en caso de programación serie. Luego, con la ayuda del SPM, el microcontrolador escribe el código binario en la sección flash de la aplicación.
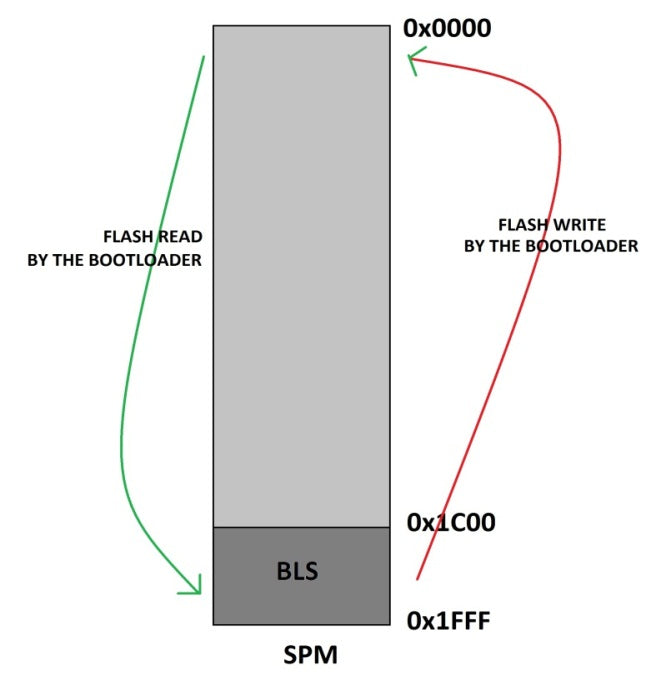
El modo de autoprogramación (SPM) es una característica del microcontrolador AVR que le permite programar su propia memoria flash. Sólo el código que se ejecuta en BLS puede hacer uso de esta función SPM. Se puede hacer que el microcontrolador inicie la ejecución desde el BLS, desde allí el código puede acceder al área flash de la aplicación. El BLS puede leer o escribir el contenido de todas las memorias flash, incluido el propio BLS.

Fig. 2: Diagrama de bloques SPM con BLS en AVR
La tarea de escribir código BLS con SPM se ha simplificado gracias a las API disponibles en el archivo de encabezado.
|
FUNCIÓN |
DESCRIPCIÓN |
PARÁMETRO |
|
boot_is_spm_interrupt |
Compruebe si la interrupción SPM está habilitada. |
|
|
boot_lock_bits_set (bloque_bits) |
Configure los bits de bloqueo del cargador de arranque |
Una máscara de qué bits de bloqueo del gestor de arranque configurar |
|
boot_lock_bits_set_safe (bloqueo_bits) |
Espera a que se completen las operaciones de EEPROM y SPM antes de configurar los bits de bloqueo |
Una máscara de qué bits de bloqueo del gestor de arranque configurar |
|
boot_lock_fuse_bits_get (dirección) |
Lea los bits de cerradura o fusible en la dirección indicada. Devuelve 0 o 1 dependiendo de si el bit del fusible está programado o no |
La dirección para leer |
|
boot_page_erase (dirección) |
Eliminar la página flash a la que hace referencia la dirección |
Una dirección de byte en flash |
|
boot_page_erase_safe (dirección) |
espera a que se completen las operaciones de EEPROM y SPM antes de borrar la página |
Una dirección de byte en flash |
|
boot_page_fill (dirección, datos) |
Llene el búfer de página temporal de Boot-Loader para la dirección flash con palabra de datos |
La dirección es una dirección de bytes. Los datos son una palabra. |
|
boot_page_fill_safe (dirección, datos) |
espera a que se completen las operaciones EEPROM y SPM antes de llenar la página |
La dirección es una dirección de bytes. Los datos son una palabra. |
|
boot_page_write (dirección) |
Escriba el búfer de la página temporal del Boot-Loader en la página flash que contiene la dirección |
Dirección de bytes flash |
|
boot_page_write_safe (dirección) |
espera a que se completen las operaciones EEPROM y SPM antes de escribir la página |
Dirección de bytes flash |
|
arranque_rww_busy |
Compruebe si la sección RWW está ocupada |
|
|
boot_rww_enable |
Habilite la sección de memoria de lectura mientras se escribe. |
|
|
boot_rww_enable_safe |
espera a que se completen las operaciones EEPROM y SPM antes de activar la memoria RWW |
|
|
boot_signature_byte_get (dirección) |
Devuelve el byte de la línea de firma en la dirección dada. |
La dirección del parámetro puede ser de 0 a 0x1F. |
|
arranque_spm_busy |
Compruebe si la instrucción SPM está ocupada |
|
|
arranque_spm_busy_wait |
Espere mientras la instrucción SPM esté ocupada |
|
|
boot_spm_interrupt_disable |
Deshabilitar la interrupción SPM |
|
|
boot_spm_interrupt_enable |
Habilitar interrupción SPM |
|
Figura 3: API importantes en el archivo de encabezado AVR para SPM
Con las API anteriores, se puede escribir código para SPM en un microcontrolador AVR, siempre que el código siga ciertos pasos en orden. En este proyecto el código que fue programado desde el inicio de la memoria flash se reprograma en otra región de la memoria flash como tal. La tarea de programar una región de la memoria flash con el binario obtenido de la otra región se puede realizar en los siguientes tres pasos principales.
Paso: 1 Elimina la página flash que estás a punto de escribir
El primer paso es borrar la página flash que está a punto de escribirse con los nuevos valores. La API que ayuda a ejecutar este paso es;
Boot_page_erase (dirección)
Esta API puede eliminar una página completa en flash a la que se dirige el parámetro. En el código, la dirección de la página borrada es 256. La siguiente imagen muestra el estado del búfer de página temporal y la memoria flash en el paso 1. El búfer de página temporal es un búfer en el que se puede almacenar una página completa antes de flashearla. en una página de la memoria flash.

Fig. 4: La figura representa el estado del buffer de página temporal y la memoria flash en el AVR SPM
Paso: 2 Almacene los valores en un búfer temporal antes de escribir en una página flash
Este es el segundo paso en el que debe almacenar el binario requerido en un búfer temporal antes de escribir en cualquier página de memoria flash. La API que se puede utilizar para este fin es;
boot_page_fill (dirección, datos)
Esta API llena el búfer de página temporal del Boot-Loader byte a byte antes de actualizar los datos en el búfer de página temporal en una página como tal. Los datos del parámetro representan cada byte en el búfer y la dirección del parámetro representa la dirección de la página + desplazamiento de la ubicación del búfer donde se debe almacenar el byte de datos.
La siguiente figura representa la operación en la que el búfer de página temporal se llena byte a byte utilizando la API boot_page_fill(dirección, datos).

Fig. 5: Operación de transferencia de datos al búfer de página temporal usando la API AVR boot_page_fill
Los datos de los parámetros en la API boot_page_fill (dirección, datos) en realidad se leen desde la primera ubicación de la memoria flash con la ayuda de otra API que está disponible en el archivo de encabezado.
pgm_read_byte (dirección)
|
FUNCIÓN |
DESCRIPCIÓN |
PARÁMETRO |
|
pgm_read_byte (dirección) |
Esta función devuelve el byte que se lee de la memoria flash al que hace referencia el parámetro 'dirección' |
Se refiere a la ubicación de la memoria flash desde la cual se debe leer el byte. |
Paso:3 Programe el buffer temporal llenado en la página flash ya borrada
Este es el paso final en el que el búfer temporal lleno se actualiza utilizando una API en la página ya borrada de la memoria flash. La API que ayuda en este paso es;
boot_page_write (dirección)

Fig. 6: Datos del búfer temporal transferidos a la memoria Flash del AVR mediante API
El código de este proyecto que se escribió para BLS puede copiar 300 bytes de la memoria flash al búfer temporal a partir de la dirección 0x0000. Luego, estos bytes se transfieren a la página de la memoria flash comenzando en la dirección 0x0100. Después de hacer esto, el código BLS saltará a la dirección 0x0100 para que el binario reescrito pueda ejecutarse a continuación. Con este código del cargador de arranque, cualquier programa que ingresemos en la dirección que comienza en 0x0000 se reescribirá en x 0x0100 y se ejecutará. Se puede escribir una aplicación de prueba de LED parpadeante simple en la memoria flash a partir de 0x0000 para probar el funcionamiento. Actualice primero el código BLS y luego el código de la aplicación LED siguiendo los pasos explicados en el proyecto anterior sobre LED parpadeante AVR BLS . Cuando el LED parpadea, significa que el código se ha reescrito de una sección de la memoria flash a otra y se está ejecutando desde allí.

Fig. 7: LED parpadeando usando SPM del circuito AVR configurado en la placa de pruebas
Código fuente del proyecto
###
#definir F_CPU 8000000
###
Código fuente del proyecto
###
#definir F_CPU 8000000
###
Diagramas de circuito
| Diagrama de circuito de cómo utilizar SPM para la programación Flash to Flash |  |
Componentes del proyecto
- ATmega16
- LCD
- CONDUJO
- Resistor





¿Preguntas relacionadas con este artículo?
 Pregunte y discuta en los foros Electro-Tech-Online.com y EDAboard.com.
Pregunte y discuta en los foros Electro-Tech-Online.com y EDAboard.com.
¡¡Dinos qué piensas!! Cancelar respuesta
Debes iniciar sesión para publicar un comentario.