Un controlador de velocidad electrónico (ESC) es un componente vital de un dron con vista en primera persona (FPV). El sistema de propulsión de un dron se construye a partir de tres componentes principales:
- el controlador de vuelo
- El controlador electrónico de velocidad (ESC)
- Motores de drones
El controlador de vuelo recibe señales del transmisor de radio y envía señales al ESC. Así, el ESC controla la velocidad de rotación del motor, maniobrando el dron en el cielo. Debido a que el motor de cada dron gira a una velocidad ligeramente diferente, cada uno requiere un ESC, que funciona de manera similar a la caja de cambios de un vehículo. Controla la velocidad de rotación en base a señales temporizadas.
Un dron utiliza motores de CC con o sin escobillas. Los motores de CC con escobillas son más baratos y se utilizan a menudo en juguetes o mini drones. Los drones comerciales y de consumo utilizan motores sin escobillas, que son más caros pero también más eficaces. Se utilizan ESC de diferentes tipos con ambos motores.
 La última generación de controladores de velocidad electrónicos es avanzada y ofrece numerosas funciones. Se recomienda comprar una combinación de controladores de vuelo y ESC para evitar la compatibilidad entre proveedores. El combo FC-ESC es una opción, y el ESC y el controlador de vuelo compatibles se pueden comprar por separado. Todos los componentes del sistema de propulsión de un dron están estrechamente acoplados. Por eso es importante revisar las especificaciones de los EFC antes de comprar uno.
La última generación de controladores de velocidad electrónicos es avanzada y ofrece numerosas funciones. Se recomienda comprar una combinación de controladores de vuelo y ESC para evitar la compatibilidad entre proveedores. El combo FC-ESC es una opción, y el ESC y el controlador de vuelo compatibles se pueden comprar por separado. Todos los componentes del sistema de propulsión de un dron están estrechamente acoplados. Por eso es importante revisar las especificaciones de los EFC antes de comprar uno.
En este artículo, analizaremos los principales factores a considerar al elegir un controlador de velocidad electrónico para su dron DIY FPV.
¿Qué es exactamente un controlador de velocidad electrónico?
Un controlador de velocidad electrónico controla la velocidad de los motores de un dron basándose en las señales de aceleración del controlador de vuelo. Un ESC conecta los motores al controlador de vuelo y la batería. El controlador de vuelo no puede controlar directamente los motores del dron, por lo que el ESC funciona como hardware de interfaz entre los dos. También es responsable de convertir la energía CC de la batería LiPo en energía CA trifásica para los motores del dron.
El ESC interactúa con el motor a través de tres cables. El cableado determina el sentido de rotación del motor. La cantidad de corriente suministrada al motor y la velocidad de rotación dependen de la señal de aceleración del controlador de vuelo.
El circuito ESC consta de un microcontrolador, MOSFET, controladores de puerta, un regulador de baja caída y condensadores de filtrado. También puede tener un sensor de corriente y LED en la placa de circuito. Puede que tenga un circuito de apagado de batería (BEC), pero no siempre.
tipos de CES
Como se mencionó, los drones se construyen con motores con o sin escobillas. Sin embargo, los controladores electrónicos de velocidad de estos motores son diferentes. Los ESC para motores con escobillas se utilizan comúnmente en vehículos RC. Los ESC para motores sin escobillas son livianos y brindan alto rendimiento y control. Todos los drones comerciales utilizan motores sin escobillas.
Los ESC también están disponibles en dos configuraciones:
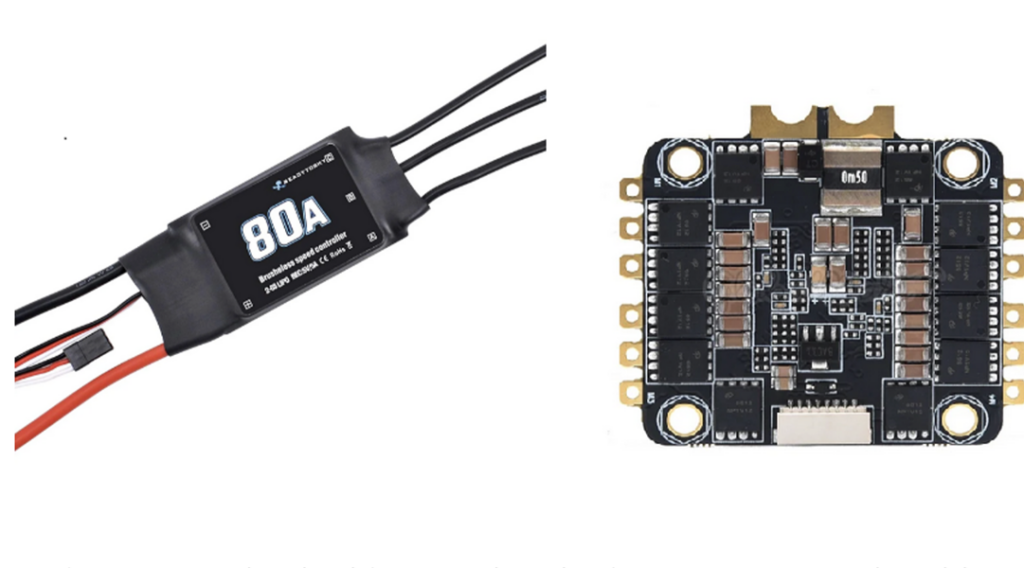
- ESC individuales: módulos autónomos que controlan un solo motor de dron
- CES 4 en 1: consta de cuatro ESC únicos integrados en una sola placa
Los ESC individuales son placas de circuito ESC de bajo costo que se pueden montar en los brazos de un dron, ofreciendo un mejor flujo de aire y enfriamiento natural. Son fáciles de instalar y reemplazar si están dañados.
La batería LiPo alimenta el ESC a través de un tablero de distribución de energía (PDB) o un controlador de vuelo todo en uno (AiO), que tiene un PDB incorporado. Cada ESC se conecta al controlador de vuelo a través de un mazo de cables diferente, y este cableado (con soldadura) agrega peso al dron. Este cableado en la estructura del dron es la principal desventaja de los ESC individuales.
Además, al instalar ESC individuales, se debe ajustar la masa central del dron en consecuencia.
Los ESC 4 en 1 están diseñados para su uso en cuadricópteros. Estos módulos vienen en el mismo tamaño que el controlador de vuelo y se basan en el patrón de montaje de estructuras estándar de drones. Por ejemplo, los tamaños de los ESC 4 en 1 incluyen 16x16 mm, 20x20 mm, 30x30 mm, etc.
Un ESC 4 en 1 está montado justo debajo del controlador de vuelo, conectado mediante un único arnés. Usar un ESC 4 en 1 es conveniente y minimiza la soldadura y el cableado. Además, debido a que está montado en el centro del dron, justo debajo del controlador de vuelo, no es necesario ajustar el centro de masa del dron.
Sin embargo, estos ESC carecen de modularidad. Se debe reemplazar toda la placa si se daña un solo ESC en un ESC 4 en 1, aunque generalmente son confiables. Los ESC más grandes son los más duraderos ya que tienen MOSFET más grandes integrados.
Si estás construyendo un cuadricóptero, un ESC 4 en 1 es la opción más conveniente. Los ESC únicos son más asequibles y ofrecen modularidad y bajo riesgo. Si está construyendo un dron diferente, como un dron de tres rotores, un hexacóptero, un octocóptero u otro diseño, los ESC únicos son la única opción.
¿Por qué utilizar ESC?
Un controlador de vuelo no puede controlar directamente los motores del dron, independientemente de si son con o sin escobillas. Una razón es que el controlador de vuelo es una placa de microcontrolador que funciona con bajo voltaje y corriente, mientras que los motores del dron funcionan con alta corriente. En segundo lugar, los motores de los drones son inherentemente inestables. La velocidad de los motores simplemente no se puede controlar sin un circuito dedicado como un ESC.
La aerodinámica de un multicóptero es más compleja que la de un helicóptero. En un helicóptero, sólo un rotor genera empuje para el vuelo y hay un rotor de cola para contrarrestar el par generado por el rotor principal. En un multicóptero, cada motor genera su propio empuje, que debe controlarse para garantizar un vuelo estable.
El controlador de vuelo tiene un sensor giroscópico incorporado que monitorea la orientación y dirección del dron. El controlador de vuelo genera señales cronometradas a todos los rotores según la retroalimentación del sensor giroscópico. Esto asegura que el multicóptero mantenga una orientación estable durante el vuelo.
Cómo funciona un ESC en drones FPV
Un ESC para motores con y sin escobillas se basa en el mismo principio. El ESC extrae energía de la batería LiPo y recibe una señal de control del controlador de vuelo. La señal de control es una onda modulada por ancho de pulso (PWM). La cantidad de corriente suministrada al motor es proporcional al ancho de la señal PWM.
Por lo tanto, el motor gira a mayor velocidad cuando el controlador de vuelo envía una señal de control más amplia al ESC, y viceversa. La señal de control del controlador de vuelo se determina basándose en la retroalimentación de los sensores de orientación y rumbo del controlador de vuelo y la entrada del piloto desde el transmisor remoto.
La velocidad variable de los rotores se controla para que el dron vuele en la dirección y altitud indicadas, manteniendo su orientación y estabilidad aérea.
Principales especificaciones de un ESC
Los componentes que componen el sistema de propulsión de un dron están estrechamente acoplados y son críticos. Los motores, el controlador de vuelo, el ESC y la batería LiPo deben ser compatibles. Supongamos que ya compró los motores, una batería compatible y un controlador de vuelo para su dron de bricolaje. Ahora es el momento de elegir los ESC. Considere estas especificaciones primero.
Clasificación actual : Esta es la cantidad de corriente que el ESC puede manejar de manera segura y lo primero que se debe considerar al seleccionar un controlador de velocidad electrónico, y puede ser difícil de determinar. La clasificación de corriente deseada depende del motor y la hélice del dron. El motor tiene una corriente nominal. La mayoría de los motores BLDC tienen una corriente de arranque máxima tres veces o más que la corriente nominal. Cuanto mayor sea el tamaño del motor y su clasificación KV, mayor será la corriente. Las hélices más grandes o más pesadas también aumentan la corriente consumida por los motores. Cuando un motor gira, si la corriente consumida por él es mayor que la que el ESC puede manejar, el ESC se sobrecalentará y eventualmente se quemará.
Los ESC tienen dos clasificaciones actuales, continua e intermitente. La clasificación actual indicada en la etiqueta ESC es la clasificación de corriente continua. Es la corriente continua máxima que normalmente puede manejar un ESC. La clasificación de corriente de ruptura es la corriente máxima que un ESC puede tolerar durante unos segundos. Si la corriente consumida por el motor excede la clasificación de corriente de ruptura y persiste por más tiempo (>10 segundos), el ESC se quemará. La clasificación de corriente de ruptura es siempre mayor que la clasificación de corriente continua.
Las clasificaciones de corriente continua típicas para un ESC son 6A, 10A, 20A, 30A y 35A. ESC 6A y 10A son adecuados para juguetes y mini drones con hélices más pequeñas y ligeras. Generalmente, estos drones funcionan con baterías LiPo de dos o tres celdas. Los ESC de 30A o 35A son adecuados para drones más grandes con hélices de cinco pulgadas o alimentados por baterías LiPo de cinco o seis celdas.
Los ESC 30A y 35A tienen un peso similar, pero el ESC 35A ofrece mayor confiabilidad y durabilidad. Como regla general, el amperaje de los ESC debe ser al menos entre un 10 y un 15 % mayor que la corriente máxima del motor del dron a máxima aceleración. Si la clasificación del motor es de 20 A a máxima aceleración, la clasificación de corriente continua del ESC debe ser de al menos 25 A.
Muchos ESC tienen un sensor de temperatura incorporado para evitar el sobrecalentamiento y evitar que el dron vuele cerca de objetos con alta conductividad térmica.
Los motores de drones rara vez, o nunca, consumen la corriente nominal máxima. La corriente máxima consumida normalmente siempre permanece entre un 20 y un 30 % inferior a la corriente nominal máxima. Si la corriente máxima consumida por un motor a toda velocidad es de 20 A en condiciones de tierra, normalmente consumirá una corriente máxima de 15 a 16 A durante el vuelo.
Hay dos razones para esto. Durante un vuelo, los motores de los drones rara vez funcionan a toda velocidad. La velocidad de rotación varía en segundos para mantener la orientación y seguir la dirección indicada. En segundo lugar, los motores y el ESC experimentan un efecto de enfriamiento debido al flujo de aire durante el vuelo.
Es importante que la clasificación ESC actual no sea innecesariamente superior a los requisitos del dron. Si un dron solo necesita 20A ESC, agregar un 35A ESC no dañará la operación, pero agregará peso y tamaño extra al dron.
Clasificación de voltaje de entrada : La clasificación de voltaje máximo de un ESC también es importante. Aunque algunos ESC están clasificados para baterías LiPo 3S-4S, otros pueden admitir baterías LiPo 6S. Si el voltaje de la batería es mayor que el voltaje máximo del ESC, tanto el ESC como el motor pueden resultar dañados. Si un motor funciona con una batería de alto voltaje, la corriente consumida para proporcionar la misma potencia se reduce.
Por lo tanto, si se selecciona un ESC de alto voltaje, se incrementará la potencia general. Un dron de alto voltaje puede volar más rápido que un dron de bajo voltaje. Los picos de tensión de la batería son siempre superiores a la tensión nominal. Es por eso que muchos fabricantes prefieren el 6S ESC debido a la mayor tolerancia al voltaje.
Peso y tamaño : normalmente, cuanto mayor sea la clasificación ESC actual, más pesado será el dron y viceversa. Cuanto más ligero sea el dron, mejor... pero hay compensaciones. Los ESC de corriente más baja son más livianos, pero generalmente ofrecen un rendimiento más bajo y menos disipación de calor (lo que puede provocar sobrecalentamiento).
Un ESC de alta corriente ofrece mejor rendimiento y refrigeración, pero será más grande en tamaño y peso. Normalmente, los ESC individuales pesan entre 4 y 6 gramos, y un ESC 4 en 1 pesa entre 12 y 15 gramos. Si la estructura de un dron tiene brazos delgados o cortos, el tamaño de un solo ESC no debe exceder de 1 a 2 mm de las dimensiones del brazo. Para cuadricópteros, un ESC 4 en 1 es la opción ideal, disponible en clasificaciones de 6A a 35A y cabe fácilmente debajo del controlador de vuelo independientemente del tamaño.
Firmware ESC : El firmware determina el rendimiento de un ESC. También proporciona información sobre los protocolos ESC compatibles y las interfaces de configuración.
Algunos firmware ESC populares incluyen BLHeli_S ESC, BLHeli ESC, BLHeli_32, KISS y SimonK ESC.
- SimonK es un firmware ESC de código abierto antiguo que ahora está desactualizado. Así que es mejor evitarlo.
- BLHeli y BLHeli_S son firmware ESC de código abierto. BLHeli está desactualizado pero todavía lo utilizan algunos ESC. BLHeli_S es un BLHeli de segunda generación de BusyBee Processors. Viene con hardware PWM para un control fluido del motor y admite señales de entrada de 1 a 2 ms con Oneshot125, Oneshot42 y Multishot.
- BLHeli_32 es un BLHeli de tercera generación con código fuente cerrado que requiere una tarifa de licencia. Este se basa en un microcontrolador de 32 bits que proporciona mayor potencia de procesamiento, menor latencia y mayores frecuencias de actualización para las señales de entrada.
- KISS es un firmware ESC de código cerrado que solo se ejecuta en KISS ESC.
Protocolos ESC : Son similares al sistema operativo de una computadora. Los protocolos determinan cómo se comunican un ESC y un controlador de vuelo. También afectan el rendimiento y la estabilidad del dron.
Los protocolos ESC más populares incluyen Standard PWM, Oneshot125, Oneshot42, Multishot, Dshot y Proshot. Proshot es el protocolo ESC más nuevo, mientras que el PWM estándar es el más antiguo. El protocolo ESC determina el idioma y las reglas en las que se comunicarán el ESC y el controlador de vuelo. También determina la velocidad y frecuencia de la comunicación entre ambos.
El PWM estándar requiere de 1000 a 2000 nodos para comunicar un paquete de datos, Oneshot125 toma de 125 a 250 nodos, Oneshot42 toma de 42 a 84 nodos, Multishot toma de 5 a 25 nodos y Dshot toma de 13,4 a 106,8 nodos. Multishot es, con diferencia, el protocolo ESC más rápido.
Procesador ESC : Hay tres familias principales de procesadores (microcontroladores) que se utilizan en los multiplexores ESC: controladores ATMEL de 8 bits, SILAB de 8 bits y ARM Cortex de 32 bits. Los primeros controladores de 8 bits de ATMEL se usaban comúnmente y eran compatibles con SimonK y BEHeli. Finalmente fueron superados por los controladores de 8 bits de SILAB, que sólo son compatibles con BELHeli y BLHeli_S. Más recientemente, el controlador ARM Cortex de 32 bits se usa comúnmente y es compatible con BHeli_32.
ESC simple o 4 en 1 : Se puede usar un ESC simple o 4 en 1 en la construcción de cuadricópteros. Pero es más limpio y conveniente usar ESC 4 en 1.
El 4 en 1 ofrece cableado limpio, peso centralizado y fácil instalación y, a menudo, viene con reguladores de voltaje incorporados que se pueden usar para la distribución de energía. Sin embargo, si uno de los ESC del 4 en 1 está dañado, se debe reemplazar toda la placa. Los ESC individuales mantienen el diseño modular y son más asequibles. Al ensamblar ESC individuales, espere más cableado y ajuste del centro de masa. Para drones que no sean cuadricópteros, los ESC individuales son más adecuados.
Con o sin BEC : BEC significa circuito de eliminación de batería. Un ESC con BEC puede alimentar otros componentes del dron, como el receptor de RF, los servos, el controlador de vuelo y otros componentes de 5 V. Esto elimina la necesidad de baterías adicionales en el dron y reduce el peso. Hoy en día, la mayoría de los controladores de vuelo vienen con un módulo de alimentación independiente, suficiente para alimentar el receptor de RF, el timón y el controlador de vuelo. En estos casos no es necesario un BEC en el ESC.
Hay dos tipos de BEC en los ESC, lineales y conmutados. Un BEC lineal es más barato pero solo tiene un 25% de eficiencia energética. Los BEC conmutados son más caros pero proporcionan un 85% de eficiencia energética. Por lo tanto, vale la pena comprobar si el BEC incluido en un ESC es lineal o conmutado. También es importante comprobar la clasificación BEC actual. Debe ser mayor que el consumo actual total de todos los receptores y servos. Para drones más pequeños, 1,5~2A BEC es suficiente. Para drones de tamaño mediano, el 3A BEC es adecuado. Los drones grandes necesitan un BEC 5A.
Limitaciones de la batería : si se selecciona una batería más pequeña como 3S-4S para un dron, es posible que se descargue prematuramente debido a la resistencia interna. El voltaje puede caer hasta el límite de descarga a medida que se extrae más corriente de la batería. La batería también puede descargarse antes de alcanzar la corriente máxima del ESC. Por lo tanto, el tamaño de la batería LiPo puede limitar el tiempo de vuelo y la altitud máxima a la que puede volar el dron. Para tiempos de vuelo más largos, se prefiere una batería grande (como 6S) y entonces se debe seleccionar un ESC con una clasificación de corriente más alta.
Capacidad de respuesta : hoy en día, muchos ESC cuentan con soporte de frenado activo que mejora la capacidad de respuesta del dron. Un ESC con transistores dedicados o controladores de puerta (la opción ideal) normalmente tiene una mejor capacidad de respuesta. También debe incluir hardware PWM.
Empuje del ESC : El empuje producido por un ESC de calidad es generalmente entre un 20 y un 30 % mayor que uno menos costoso o efectivo. El empuje producido en los motores depende principalmente del ESC. Otros factores que pueden afectar la producción de empuje en los motores incluyen:
- La calidad de las uniones de soldadura.
- Eficiencia del disipador de calor ESC
- La calidad del dron
Se recomienda comprar ESC de fabricantes de renombre en lugar de buscar alternativas más baratas.
Condensadores : Una de las últimas cosas que se deben verificar son los capacitores de baja ESR en el tablero de distribución de energía del ESC. Estos condensadores desempeñan un papel esencial en la protección de los componentes de los drones contra picos de voltaje. Los condensadores también ayudan a cancelar el ruido electrónico en las señales de vídeo FPV.
¿Cómo elegir un ESC?
Primero, determine la configuración del motor y la batería LiPo de su dron. Luego decida si lo ideal es un ESC único o 4 en 1. Ambos tipos de ESC tienen diferentes ventajas y desventajas. Luego, puede seleccionar ESC de fabricantes acreditados según las clasificaciones de corriente y voltaje. Esto determinará automáticamente el tamaño y el peso de su ESC, que debe asegurarse de que sea compatible con el diseño de su dron.
Finalmente, puede seleccionar un ESC según el procesador, el firmware y los protocolos admitidos. Estos factores son cruciales para determinar los costos del ESC. Si el controlador de vuelo tiene un módulo de alimentación separado, debes buscar un ESC con BEC. Un ESC con BEC conmutado será más caro pero más eficiente energéticamente. La elección de un procesador integrado, firmware, protocolo ESC y BEC dependerá del rendimiento, la calidad y la longevidad esperados del dron, así como de su presupuesto.