
El proyecto pretende controlar una silla de ruedas mediante la voz humana . Permite que una persona con discapacidad se mueva de forma independiente mediante una aplicación de reconocimiento de voz que interactúa con motores. El prototipo de silla de ruedas se construye mediante un microcontrolador, elegido por su bajo costo, así como por su versatilidad y desempeño en operaciones matemáticas y comunicación con otros dispositivos electrónicos. El sistema ha sido diseñado e implementado de manera rentable para que, si nuestro proyecto se comercializa, los usuarios necesitados en los países en desarrollo se beneficien de él.
Fig. 1: Prototipo de silla de ruedas controlada por voz para personas con discapacidad física
Aquí estamos utilizando tecnología de reorganización de voz. Entonces estamos usando el módulo HM 2007 para reconocer la señal de voz. Este módulo se utiliza para convertir la señal de voz en el código binario correspondiente que se proporciona al microcontrolador, y el microcontrolador proporciona la salida de acuerdo con la entrada de voz.
Generalmente, el microcontrolador genera códigos en su salida según la entrada. Entonces, usando este módulo podemos controlar el motor de corriente continua correspondiente al comando de voz.
Aquí hay cinco comandos de voz que se utilizan para controlar la dirección del motor.
1. Siguiente
2. Volver
3. Detener
4. Correcto
Faltan 5
Laboral
Trabajar con diagrama de bloques, circuito y PCB.

Fig. 2: Diagrama de bloques de una silla de ruedas controlada por voz para personas con discapacidad física
· Micrófono:
Se utiliza para convertir la señal de voz en señal eléctrica. La salida MIC se proporciona al módulo de reconocimiento de voz.
· Microcontrolador:
El microcontrolador es un chip semiconductor. Es programable, multifuncional y multifuncional. El AT89C51 es un microordenador CMOS de 8 bits de bajo consumo y alto rendimiento con 8 Kbytes de memoria Flash de sólo lectura (PEROM) programable y borrable.
Los dispositivos se fabrican utilizando la tecnología de memoria no volátil de alta densidad de Atmel y son compatibles con el conjunto de instrucciones y la configuración de pines estándar de la industria 80C51 y 80C52. El flash en chip permite reprogramar la memoria del programa en el sistema o mediante un programador de memoria no volátil convencional.
· Velocidad y dirección:
El motor que utilizamos se compra en AGNI MOTOR, BANGLORE y tiene las siguientes especificaciones: 120W, 9,8 Nm, 60 rpm sin carga. Se adquirieron dos baterías de plomo-ácido AMARON de 12 V y 32 Ah.
· Batería:
Aquí se utiliza una batería de 12 V para que los motores proporcionen suficiente energía y aquí también utilizamos la carga mecánica de la batería. Entonces aquí usamos un cargador de batería para cargar la batería.
· Módulo de reconocimiento de voz:
El sistema de reconocimiento de voz es un circuito de reconocimiento de voz programable, completamente ensamblado y fácil de usar. Programable, en el sentido de que entrenas las palabras (o expresiones vocales) que quieres que reconozca el circuito. Esta placa le permite experimentar muchas facetas de la tecnología de reconocimiento de voz. Tiene una salida de datos de 8 bits que se puede interconectar con cualquier microcontrolador para su posterior desarrollo. Algunas de las aplicaciones de interfaz que se pueden crear son el control de electrodomésticos, movimientos robóticos, tecnologías asistidas por voz, traducción de voz a texto y mucho más.
Número entero Trabajando con diagrama de bloquesAquí utilizamos un módulo de reconocimiento de voz para controlar el rendimiento del microcontrolador y el micrófono. El módulo de reconocimiento de voz se entrena dando 5 comandos. Los cinco comandos se convierten a un archivo hexadecimal. Este archivo hexadecimal apunta a 5 ubicaciones de direcciones del microcontrolador AT89c52. Cuando se da la orden, el programa correspondiente controla el movimiento o rotación del motor. Este es el principio de funcionamiento básico de la "silla de ruedas controlada por voz". La voz se transmite al módulo de reconocimiento de voz realizando la localización de direcciones y la silla se mueve en consecuencia. La batería y el cargador de batería sirven para suministrar energía.
Descripción del circuito
Descripción del circuito:
A. El diagrama de circuito completo de nuestro proyecto se muestra arriba en la fig. La batería de 9 V está conectada a 100 µF. Aquí se usa 7805 IC, este IC se usa para proporcionar CC constante de 5 V. La salida de este IC está conectada al pin n.° 40 del microcontrolador AT89C52. La salida del módulo de voz está conectada al puerto 1 del At89c52. Luego, la salida del puerto 2 se suministra a la entrada del circuito controlador del motor. que impulsan el motor en sentido horario y antihorario. La batería de 12v 40A está conectada al circuito del controlador del motor.
B. El microcontrolador IC recibe una salida digital de 4 bits del módulo de voz. su puerto P1 lee P1.0 – P1.3. Y la señal de interrupción se envía al pin P3.3 (interrupción externa 1). Impulsa dos motores de CC a través del puerto P2, pines P2.0 – P2.3. Un cristal de 12 MHz con doble señal para microcontrolador. Un interruptor de botón (RST) en paralelo con el condensador de 100 nF forma un circuito de reinicio para reiniciar el microcontrolador.
C. Controlará el movimiento del Land Rover dependiendo del código que reciba que se detalla a continuación en la tabla:
|
PROHIBIDO |
ENTRADA POR PUERTA1 |
SALIDA POR LA PUERTA2 |
MOVIMIENTO EN SILLA DE RUEDAS |
|
|
02 |
0010 |
0A |
1010 |
PREFACIO |
|
08 |
1000 |
05 |
0101 |
VERSIÓN |
|
04 |
0100 |
02 |
0010 |
IZQUIERDA |
|
06 |
0110 |
08 |
1000 |
BIEN |
|
05 |
0101 |
03 |
0011 |
PARA DETENER |

Fig. 3: Diseño de PCB del circuito sensible a la voz de silla de ruedas
Diseño de pista para sillas de ruedas con control por voz.

Fig. 4: Disposición de la pista del circuito sensible a la voz en silla de ruedas
Lista de componentes
Lista de componentes
|
Nombre del componente |
Valor |
|
|
|
|
RESISTOR |
10E |
|
|
|
|
CONDENSADOR |
33pF |
|
|
|
|
CI |
AT89C52 |
|
|
|
|
SILLA DE RUEDAS |
– |
|
|
|
|
TOMAS |
40 PINES AT89C52 |
|
|
|
|
MÓDULO DE RECONOCIMIENTO DE VOZ |
SM 2007 |
|
|
|
|
VARIOS |
CRISTAL |
|
|
|
|
MOTORES |
MOTOR DE ENGRANAJES DE CC |
|
|
|
|
CIRCUITO DE CONDUCCIÓN |
|
|
|
|
|
|
|
|
|
|

Fig. 5: Imagen del módulo controlador del motor
· La siguiente tabla muestra los parámetros y su rango para el controlador.
|
Parámetros |
Rango |
|
Vcc (tensión de alimentación) |
6 a 16 VCC |
|
corriente de suministro |
20A continuo a 25c; 30A pulsado |
|
Frecuencia PWM |
0 a 20 kHz |
|
VIL (entrada lógica de bajo nivel) |
>0,8 V |
|
VIH (entrada lógica de alto nivel) |
3,5 V a 5 V |
|
Salida en diagnóstico 1 (ENA) y diagnóstico 2 (ENB) |
Colector abierto, internamente tirado a 5V |
· La siguiente tabla muestra los bits de control para motores.
|
A |
B |
SALIDA |
|
0 |
0 |
PARA DETENER |
|
0 |
1 |
RETROCEDER |
|
1 |
0 |
AVANCE |
|
1 |
1 |
PARA DETENER |
motor de corriente continua de 200 rpm

Fig. 6: Imagen del motor CC de 200 RPM
A. El motor de engranaje CC de alta resistencia con eje lateral de 200 RPM es adecuado para robots más grandes y sistemas de automatización pequeños. Tiene una construcción robusta con grandes engranajes. La caja de cambios está diseñada para soportar el par de calado producido por el motor. El eje de transmisión está soportado a ambos lados por casquillos metálicos. El motor funciona suavemente de 4 V a 12 V y proporciona 200 RPM a 12 V. El motor tiene un eje de transmisión en forma de D de 8 mm de diámetro y 19 mm de largo para un excelente acoplamiento.
Módulo de reconocimiento de voz:
B. El sistema de reconocimiento de voz es un circuito de reconocimiento de voz programable, completamente ensamblado y fácil de usar. Programable, en el sentido de que entrenas las palabras (o expresiones vocales) que quieres que reconozca el circuito. Esta placa le permite experimentar muchas facetas de la tecnología de reconocimiento de voz. Tiene una salida de datos de 8 bits que se puede interconectar con cualquier microcontrolador para su posterior desarrollo. Algunas de las aplicaciones de interfaz que se pueden realizar son el control de electrodomésticos, movimientos robóticos, tecnologías asistidas por voz, traducción de voz a texto y mucho más.

Fig. 7: Imagen del Módulo de Reconocimiento de Voz

Fig. 8: Diagrama de circuito del sistema de reconocimiento de voz HM2007
Especificaciones:
|
PARÁMETROS |
VALOR |
OBSERVACIÓN |
|
Prohibido |
9 a 15 voltios CC |
Utilice un adaptador DC 12V 500ma disponible comúnmente |
|
Tensión de datos de salida |
8 bits a nivel lógico de 5v |
Cualquier microcontrolador como 8051, PIC o AVR se puede conectar al puerto de datos para interpretar e implementar aplicaciones especializadas. |
Laboral
Palabras de entrenamiento para el reconocimiento:
A. Presione “1” (la pantalla mostrará “01” y el LED se apagará) en el teclado, y luego presione la tecla TRAIN (el LED se encenderá) para poner el circuito en modo de entrenamiento, por ejemplo, palabra uno. Diga claramente la palabra objetivo en el micrófono incorporado (cerca del LED). El circuito señala la aceptación de la entrada de voz haciendo parpadear y encender el LED. La palabra (o declaración) ahora se identifica como la palabra "01". Si el LED no parpadea, comience nuevamente presionando “1” y luego la tecla “TREN”. Puedes seguir practicando nuevas palabras en el circuito.
B. Presione “2” y luego TRN para entrenar la segunda palabra y así sucesivamente. El circuito aceptará y reconocerá hasta 20 palabras (números del 1 al 20). No es necesario entrenar todos los espacios de palabras. Si sólo necesitas 10 palabras objetivo, eso es todo lo que necesitas para entrenar.
Reconocimiento de prueba:
C. Repetir una palabra practicada en el micrófono. El número de palabra debe aparecer en la pantalla digital. Por ejemplo, si la palabra "directorio" fue entrenada como la palabra número 20, decir la palabra "directorio" en el micrófono hará que se muestre el número 20.
Códigos de error:
D. El chip proporciona los siguientes códigos de error:
55 = palabra larga, 66 = palabra corta, 77 = no coincide
Memoria de aprendizaje:
E. Para borrar todas las palabras de la memoria, presione “99” y luego “CLR”. Los números se desplazarán rápidamente en la pantalla digital a medida que se borre la memoria.
Cambiar y eliminar palabras:
F. Las palabras entrenadas se pueden cambiar fácilmente reemplazando la palabra original. Por ejemplo, supongamos que la palabra seis es la palabra “Capital” y desea cambiarla por la palabra “Estado”. Simplemente vuelva a entrenar el espacio de palabras presionando "6", luego la tecla TRAIN y diciendo la palabra "Estado" en el micrófono. Si desea eliminar la palabra sin reemplazarla con otra palabra, presione el número de palabra (en este caso seis) y luego presione la tecla CLR. Se ha eliminado la palabra seis.
Reconocimiento independiente simulado:
G. El sistema de reconocimiento de voz depende del hablante, lo que significa que la voz que entrenó al sistema tiene la mayor precisión de reconocimiento. Pero puedes simular el reconocimiento de voz independiente. Para que el sistema de reconocimiento simule la independencia del hablante, se utiliza más de un espacio de palabra para cada palabra objetivo. Los espacios de palabras 01, 02, 03 y 04 se asignan a la primera palabra objetivo programada.
Cronograma
Programación de proyectos
R. Utilizamos el software de programación KEIL para controlar nuestra silla de ruedas.

Fig. 9: Captura de pantalla del código C en Keil IDE utilizado para silla de ruedas controlada por voz

Fig. 10: Captura de pantalla de prueba del código C en Keil IDE utilizado para silla de ruedas controlada por voz
Unidad de carga para batería de 12V y 40A
B. Usamos baterías de 12V y 40A para alimentar ambos controladores. La unidad de carga necesaria para esta batería se muestra en la figura.
C. Se suministra 230V AC al transformador (tipo reductor) 12-0-12V y 3A a través de un fusible de 2A. Esto se utiliza para brindar protección al transformador contra cualquier variación importante en el suministro de entrada. La salida del transformador se proporciona a diodos que se utilizan como rectificador y convierten CA en CC. La corriente de hasta 3 A está limitada para estos diodos. Se utiliza un LED para indicar que la alimentación está encendida. Este LED requería un máximo de 5 V para funcionar, por lo que utilizamos 1 m. resistencia para disminuir el voltaje. El interruptor se utiliza para encender/apagar la alimentación.

Fig. 11: Diagrama del circuito del cargador de silla de ruedas controlado por voz
Cómo ejecutar el proyecto
1. Encienda la fuente de alimentación del módulo de voz para proporcionar voltaje suficiente para un funcionamiento adecuado.
2. Encienda el interruptor de apagado y dé su comando de voz según sea necesario para mover la silla de ruedas al módulo de voz.
3. Después de recibir el comando de voz, apague el interruptor de apagado para evitar cualquier otra interferencia de ruido en el módulo de voz debido a un error.
4. El módulo de voz genera un código hexadecimal que corresponde a la voz de entrada. Por ejemplo, si hablamos con antelación, la salida del módulo de voz será las 02h.
5. Este código se aplica al puerto de entrada 1 del microcontrolador AT89C52.
6. El microcontrolador genera el código correspondiente ex02h (0010) que se proporciona a ambos controladores de motor para impulsar el motor en dirección de avance.
7. Estos pasos se repiten para todos los comandos.
Código fuente del proyecto
### Programa para silla de ruedas con control por voz. #incluirdatos de caracteres sin firmar byt=0xFF; anular con llave { ent a, b; para(a=0;a<50;a++) para(b=0;b<1000;b++); } anular int1 interrupción 2 { byt=P1; EA=0; con llave; } vacío principal { P2=0x00; P1=0xFF; atrás:IE=0x84; byt=0xFF; mientras(byt==0xFF); cambiar (byte) { caso 0xF2: P2=0x0A; romper; caso 0xF4: P2=0x08; romper; caso 0xF5: P2=0x03; romper; caso 0xF6: P2=0x02; romper; caso 0xF8: P2=0x05; romper; } ir hacia atrás; } ###
Diagramas de circuito
| Diagrama de circuito: silla de ruedas controlada por voz basada en HM2007 | 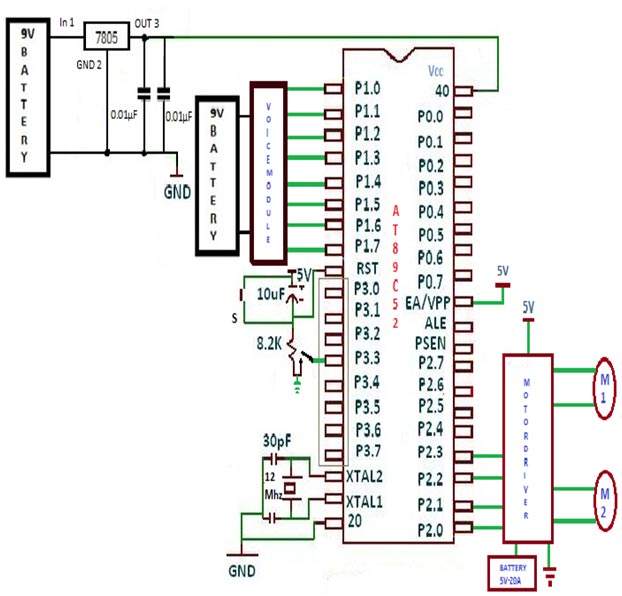 |







