Los robots de coordenadas cilíndricas son robots cuyos ejes forman un sistema de coordenadas cilíndricas. Usado para
-operaciones de montaje,
-manipulación de máquinas herramienta,
– soldadura por puntos y
-manipulación en máquinas de fundición a presión.
El movimiento del brazo principal es de arriba a abajo. El robot puede realizar este movimiento extendiendo un cilindro integrado en el brazo. En la mayoría de los robots cilíndricos, el movimiento hacia arriba y hacia abajo lo proporciona un cilindro neumático y la rotación suele ser proporcionada por un motor y engranajes.
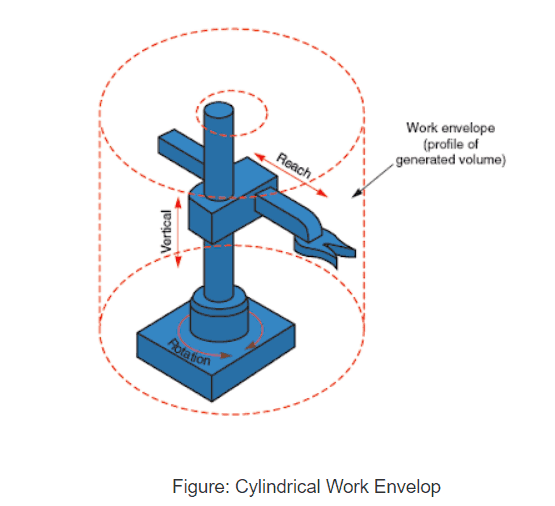 envolvente de trabajo cilíndrica
envolvente de trabajo cilíndricaConstrucción de robots cilíndricos:
- Consta de dos correderas ortogonales, colocadas en un ángulo de 90°, montadas sobre un eje giratorio.
• El alcance se logra a medida que el brazo del robot se mueve hacia adentro y hacia afuera.
• Para el movimiento vertical, el carro se mueve hacia arriba y hacia abajo por un poste estacionario, o el poste puede moverse hacia arriba y hacia abajo por la base del robot.
• El movimiento a lo largo de tres ejes traza puntos en un cilindro
• Una configuración cilíndrica generalmente da como resultado un área de trabajo mayor que una configuración cartesiana.
Sistema de coordenadas cilíndricas
Un sistema de coordenadas cilíndrico es un sistema de coordenadas tridimensional que especifica posiciones de puntos mediante la distancia desde un eje de referencia elegido, la dirección del eje con respecto a una dirección de referencia elegida y la distancia desde un plano de referencia elegido perpendicular al eje. La última distancia se da como un número positivo o negativo dependiendo de a qué lado del plano de referencia se encuentre el punto.
El origen del sistema es el punto donde las tres coordenadas se pueden dar como cero. Esta es la intersección entre el plano de referencia y el eje.
El eje también se llama eje cilíndrico o longitudinal, para diferenciarlo del eje polar, que es el radio que se encuentra en el plano de referencia, comenzando en el origen y apuntando en la dirección de referencia.
La distancia desde el eje puede denominarse distancia radial o radio, mientras que la coordenada angular a veces se denomina posición angular o acimut. El radio y el acimut se denominan juntos coordenadas polares, ya que corresponden a un sistema de coordenadas polares bidimensional en el plano que pasa por el punto, paralelo al plano de referencia. La tercera coordenada puede denominarse altura o altitud (si el plano de referencia se considera horizontal), posición longitudinal o posición axial.
Sin embargo, las configuraciones cilíndricas tienen algunas desventajas.
– Su rigidez mecánica general se reduce porque los robots con un eje giratorio deben superar la inercia del objeto durante la rotación.
– Su repetibilidad y precisión también se reducen en la dirección del movimiento giratorio.
– La configuración cilíndrica requiere un sistema de control más sofisticado que la configuración cartesiana.
Aplicación de configuraciones cilíndricas.
Las aplicaciones típicas para configuraciones cilíndricas incluyen las siguientes:
• Máquinas de carga y descarga
• Fundición a la cera perdida
• Transferencias de paletas con transportador
• Aplicaciones de fundición y forja
• Manipulación general de materiales y manipulación y manipulación de cargas especiales.
• Envasado de carne
• Aplicaciones de recubrimiento
• Colocar
• Moldeo por inyección
• Fundición a presión