Casi la mitad del consumo energético mundial se atribuye a los motores, lo que convierte el uso eficiente de los motores en una de las medidas más eficaces para resolver los problemas energéticos globales.
Un motor es un dispositivo que convierte energía eléctrica en energía mecánica. Utiliza una bobina alimentada (el devanado del estator) para generar un campo magnético giratorio, que actúa sobre el rotor (como una estructura de aluminio cerrada con jaula de ardilla) para crear un par magnético giratorio.
Los motores se dividen en motores de corriente continua (CC) y motores de corriente alterna (CA) según el tipo de fuente de energía utilizada. La mayoría de los motores de los sistemas de energía son motores de CA, que pueden ser síncronos o asíncronos (la velocidad de rotación del campo magnético del estator del motor no está sincronizada con la velocidad de rotación del rotor).
Un motor se compone principalmente de un estator y un rotor. La dirección del movimiento del conductor energizado en el campo magnético está relacionada con la dirección de la corriente y la dirección de las líneas del campo magnético. El principio de funcionamiento de un motor es la fuerza del campo magnético sobre la corriente, lo que hace que el motor gire.
El control del motor se refiere al control del arranque, la aceleración, el funcionamiento, la desaceleración y la parada del motor. Existen diferentes requisitos y objetivos según el tipo de motor y las circunstancias en las que se utiliza el motor. Para los motores, a través del control del motor, se logran los objetivos de arranque rápido, respuesta rápida, alta eficiencia, alto par de salida y alta capacidad de sobrecarga.
Los motores estándar, servomotores, motores paso a paso y servomotores mencionados aquí se refieren a micromotores de CC, que encontramos con frecuencia. Un motor, también conocido como “motor”, se refiere a este dispositivo de inducción electromagnética que mantiene la transformación o transmisión de energía electromagnética de acuerdo con la ley de inducción electromagnética de Faraday.
Un motor, también conocido como “máquina eléctrica”, está representado en el circuito de potencia por la letra inglesa “M” (anteriormente representada por “D”). Su función principal es generar par motriz como fuente de energía para dispositivos eléctricos o máquinas diversas. Un generador está representado por la letra "G" en el circuito.
1. Tipos de motores
Generalmente, los motores se refieren a dispositivos que convierten la fuerza generada por el flujo de corriente eléctrica en un campo magnético en movimiento rotacional y, en un sentido más amplio, también en movimiento lineal.
Los motores se pueden clasificar en dos categorías según su fuente de energía: motores de CC y motores de CA.
También se pueden clasificar según sus principios de rotación, con algunas excepciones para tipos especiales de motores.
(1) motor de corriente continua
motor cepillado
El motor con escobillas ampliamente utilizado generalmente se denomina motor de CC. El rotor gira conmutando la corriente a través de electrodos llamados “escobillas” (en el lado del estator) y un “conmutador” (en el lado de la armadura).
Motor CC sin escobillas
Este motor no requiere escobillas ni un conmutador, sino que utiliza funciones de conmutación como transistores para conmutar corrientes y hacer girar el motor.
Motor de paso
Este motor funciona sincrónicamente con la potencia del pulso y por eso también se le llama motor de pulso. Su característica es una operación de posicionamiento fácil y precisa.
(2) Motor de CA
motor asincrónico
La corriente alterna hace que el estator produzca un campo magnético giratorio, lo que hace que el rotor produzca una corriente inducida y gire bajo su interacción.
Motor sincrónico
La CA crea un campo magnético giratorio y el rotor con el campo magnético gira debido a la atracción. La velocidad de rotación está sincronizada con la frecuencia eléctrica.
Sobre corriente eléctrica, campos magnéticos y fuerza.
Primero, para facilitar la explicación de los principios motores, repasemos las leyes básicas de la corriente eléctrica, los campos magnéticos y la fuerza. Aunque pueda traer sensación de nostalgia, es fácil olvidar este conocimiento si no utilizamos componentes magnéticos con frecuencia.
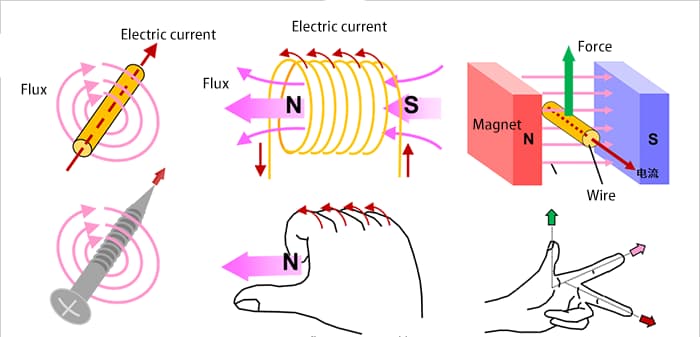
Usaremos imágenes y fórmulas para ilustrar esto.

Cuando el bucle de alambre es un rectángulo, debemos considerar la fuerza que actúa sobre la corriente.
La fuerza F que actúa sobre los lados a y c se puede calcular mediante la siguiente fórmula:

Esto produce un par alrededor del eje central.
Por ejemplo, cuando se considera el estado en el que el ángulo de rotación es justo θ, la fuerza que actúa sobre la cama en ángulo recto es sinθ. Por lo tanto, el par Ta en el lado a se puede expresar mediante la siguiente fórmula:
Asimismo, considerando el lado c, el par se duplica y genera un par calculado mediante la siguiente fórmula:
Dado que el área del rectángulo es S = hxl, sustituirla en la fórmula anterior produce los siguientes resultados:
Esta fórmula no sólo se aplica a los rectángulos sino también a otras formas comunes como los círculos. Los motores utilizan este principio.
Motor estándar
Un motor estándar, que a menudo se ve en artículos cotidianos como juguetes eléctricos y afeitadoras eléctricas, suele ser un motor de CC con escobillas. Caracterizado por su alta velocidad y bajo torque, requiere solo dos pasadores para funcionar. Cuando se conecta a los terminales positivo y negativo de una batería, el motor comienza a girar. Invertir la conexión hará que el motor gire en la dirección opuesta.
Motorreductor de engranajes
Un motor reductor de engranajes es un motor estándar equipado con una caja de cambios. Este diseño reduce la velocidad de rotación al tiempo que aumenta el par, ampliando la gama de aplicaciones prácticas para el motor estándar.
servo motor
Un servomotor consta principalmente de una carcasa, una placa de circuito, un motor sin núcleo, engranajes y un detector de posición. Funciona recibiendo una señal del receptor al servomotor. El IC integrado determina la dirección de rotación e impulsa el motor sin núcleo para que comience a girar.
El movimiento se transmite al brazo oscilante a través de engranajes reductores y el detector de posición envía simultáneamente señales para comprobar si se ha alcanzado la posición deseada. El detector de posición es esencialmente una resistencia variable, que cambia los valores de resistencia a medida que gira el servomotor. Al detectar estos valores de resistencia, se puede determinar el ángulo de rotación.
Las especificaciones proporcionadas por los fabricantes de servomotores generalmente incluyen dimensiones (mm), torque (kg/cm), velocidad (seg/60°), voltaje de prueba (V) y peso (g). La unidad de torsión es kg/cm, lo que indica cuántos kilogramos se pueden levantar con un brazo oscilante de 1 cm de largo.
Este es el concepto de brazo de palanca, por lo que cuanto más largo sea el brazo, menor será el par. La unidad de velocidad es seg/60°, lo que representa el tiempo necesario para que el servomotor gire 60°.
Motor de paso
Un motor paso a paso es un elemento de control de bucle abierto que convierte señales de impulsos eléctricos en desplazamiento angular o lineal. En condiciones sin sobrecarga, la velocidad y la posición de parada del motor dependen únicamente de la frecuencia y el número de señales de pulso, independientemente de los cambios de carga.
Cuando un controlador paso a paso recibe una señal de pulso, impulsa el motor paso a paso para girar un ángulo fijo, conocido como "ángulo de paso", en una dirección predeterminada. Su rotación progresa en incrementos de ángulo fijo. Se puede controlar el número de pulsos para gestionar el desplazamiento angular, logrando un posicionamiento preciso. Asimismo, la frecuencia de pulso se puede utilizar para controlar la velocidad de rotación y aceleración del motor, logrando así la regulación de velocidad.
Un servomotor, también conocido como motor actuador, sirve como unidad de ejecución en sistemas de control automático al convertir las señales eléctricas entrantes en una salida de desplazamiento angular o velocidad angular en el eje del motor.
Se presenta en dos categorías principales: servomotores de corriente continua (CC) y de corriente alterna (CA). La característica principal de estos motores es que no hay fenómeno de autorrotación cuando el voltaje de la señal es cero y la velocidad de rotación disminuye uniformemente a medida que aumenta el par.
Los servomotores dependen principalmente de impulsos para su posicionamiento. Básicamente, el servomotor gira en un ángulo correspondiente al pulso por cada pulso recibido, logrando así el desplazamiento. Como el servomotor tiene la capacidad de emitir impulsos, emite un número correspondiente de impulsos para cada grado de rotación.
Esto forma un sistema sensible o de "bucle cerrado" con los pulsos recibidos. De esta manera, el sistema sabe cuántos pulsos se enviaron al servomotor y cuántos pulsos se recibieron. En consecuencia, puede controlar la rotación del motor con mucha precisión, permitiendo un posicionamiento preciso de hasta 0,001 mm.
Los servomotores se dividen ampliamente en categorías de servos de CA y servos de CC.
Los servomotores de CA se dividen en servomotores de CA asíncronos y servomotores de CA síncronos.
Los servomotores de CC se dividen en motores con y sin escobillas. Los motores con escobillas son de bajo costo, de estructura simple, producen un alto par de arranque, tienen un amplio rango de control de velocidad y son fáciles de controlar. Requieren mantenimiento pero son incómodos (por ejemplo, reemplazo de escobillas), producen interferencias electromagnéticas y tienen requisitos ambientales específicos. Por lo tanto, son adecuados para aplicaciones industriales y civiles generales sensibles a los costes.
2. ¿Cómo giran los motores?
1) Los motores giran con la ayuda de imanes y fuerza magnética.
Alrededor de un imán permanente con un eje giratorio,
- ① Gire el imán (para producir un campo magnético giratorio),
- ② Según el principio de que los polos opuestos se atraen y los polos iguales se repelen entre el polo N y el polo S,
- ③ El imán con el eje giratorio girará.
Este es el principio básico de la rotación del motor.

El flujo de corriente a través de un cable genera un campo magnético giratorio (fuerza magnética) a su alrededor, lo que hace que el imán gire.
De hecho, este es el mismo estado operativo descrito anteriormente.
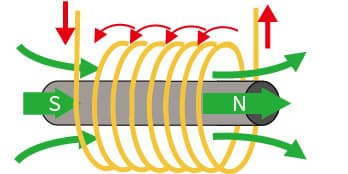
Además, si el cable se enrolla en una bobina, las fuerzas magnéticas se combinan para formar un gran flujo de campo magnético (flujo magnético), que produce los polos N y S.
Insertar un núcleo de hierro en el cable en forma de bobina facilita el paso de las líneas del campo magnético y genera una fuerza magnética más fuerte.
2)Prácticos motores rotativos
Aquí presentaremos el método práctico de usar CA trifásica y bobinas para producir un campo magnético giratorio como un motor rotativo.
(La CA trifásica es una señal de CA con una diferencia de fase de 120°).

El campo magnético combinado en el estado anterior ① corresponde a la figura ① a continuación.
El campo magnético combinado en el estado ② anterior corresponde a la figura ② siguiente.
El campo magnético combinado en el estado anterior ③ corresponde a la figura ③ a continuación.

Como se mencionó anteriormente, la bobina enrollada alrededor del núcleo de hierro se divide en tres fases, con la bobina de fase U, la bobina de fase V y la bobina de fase W dispuestas a intervalos de 120°.
La bobina de alto voltaje genera un polo N, mientras que la bobina de bajo voltaje genera un polo S.
Cada fase cambia según una onda sinusoidal, por lo que la polaridad (polo N, polo S) y el campo magnético (fuerza magnética) de cada bobina cambiarán.
En este momento, si nos fijamos en la bobina que produce un polo N, cambia secuencialmente de la bobina de fase U a la bobina de fase V, de la bobina de fase W a la bobina de fase U, provocando la rotación.
3. Estructura de los motores pequeños
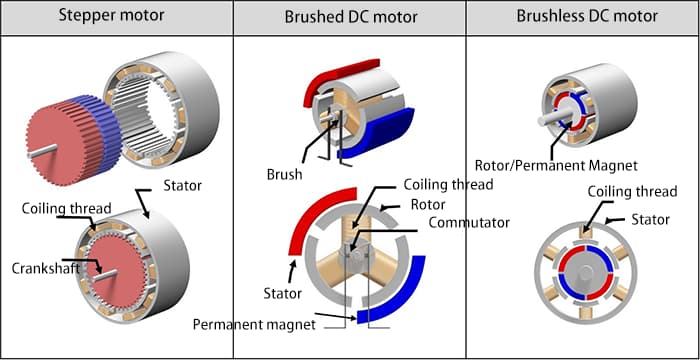
La siguiente figura muestra las estructuras aproximadas y comparaciones de tres tipos de motores: el motor paso a paso, el motor CC con escobillas y el motor CC sin escobillas.
Los componentes básicos de estos motores son principalmente bobinas, imanes y rotores, y se clasifican en tipo fijo por bobina y tipo fijo por imán debido a sus diferentes tipos.
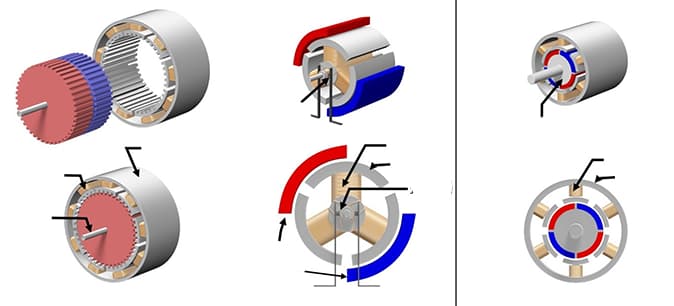
La siguiente es una explicación estructural relacionada con el diagrama de ejemplo. Dado que puede haber otras estructuras si las desglosamos más, comprenda que este artículo describe la estructura general.
En el motor paso a paso que se muestra aquí, la bobina está fija en el lado exterior y el imán gira en el lado interior.
En el motor de CC con escobillas que se muestra aquí, el imán está fijo en el lado exterior y la bobina gira en el lado interior. Las escobillas y el conmutador son responsables de suministrar energía a la bobina y cambiar la dirección de la corriente.
En el motor sin escobillas que se muestra aquí, la bobina está fija en el lado exterior y el imán gira en el lado interior.
Debido a los diferentes tipos de motor, incluso si los componentes básicos son los mismos, la estructura puede ser diferente. Se dará una explicación detallada en cada sección.
4. Motor cepillado
Estructura del motor cepillado
A continuación se muestra cómo se ve un motor de CC con escobillas que se usa a menudo en los modelos, así como un diagrama despiezado de un motor típico de dos polos (2 imanes) y tres ranuras (3 bobinas). Muchas personas pueden tener experiencia en desmontar motores y quitar imanes.
Como puede verse, el imán permanente de un motor de CC con escobillas es fijo y las bobinas pueden girar alrededor del centro interno del motor. El lado fijo se llama "estator", mientras que el lado giratorio se llama "rotor".

A continuación se muestra un diagrama esquemático que representa el concepto de estructura del motor.
Hay tres conmutadores (placas metálicas curvas para cambiar la corriente) en la periferia del eje central giratorio. Para evitar que entren en contacto, los interruptores están dispuestos a intervalos de 120 grados (360 grados ÷ 3). Los conmutadores giran junto con la rotación del eje.
Cada interruptor está conectado a un extremo de la bobina y al otro extremo de la bobina, y los tres interruptores y las tres bobinas forman una red de circuito en su conjunto (en forma de anillo).
Se fijan dos escobillas a 0° y 180° para contactar con los conmutadores. La fuente de alimentación de CC externa está conectada a las escobillas y la corriente fluye a lo largo de la trayectoria de las escobillas → conmutador → bobina → escobillas.
Principio de funcionamiento de un motor con escobillas.

① Rotación en sentido antihorario desde el estado inicial.
En el estado inicial, la Bobina A está en la parte superior y la fuente de alimentación está conectada a las escobillas con los lados izquierdo (+) y derecho (-) definidos. Una gran corriente fluye desde la escobilla izquierda a través del conmutador hasta la bobina A, y el lado superior (exterior) de la bobina A se convierte en una estructura de polo S.
Debido a que la mitad de la corriente que fluye a través de la bobina A del cepillo izquierdo hacia las bobinas B y C está en la dirección opuesta a la bobina A, el exterior de las bobinas B y C se convierte en un polo N más débil (representado por letras más pequeñas en el diagrama).
Los campos magnéticos generados en estas bobinas y la repulsión y atracción entre los imanes hacen que la bobina gire en sentido antihorario.
②Rotación adicional en sentido antihorario
Suponiendo que la bobina A está en un estado de rotación de 30 grados en sentido antihorario, la escobilla derecha entra en contacto con dos conmutadores.
La corriente en la bobina A continúa fluyendo desde la escobilla izquierda a través de la escobilla derecha, y el lado exterior de la bobina A sigue siendo un polo S.
La misma corriente que en la bobina A fluye a través de la bobina B, y el lado exterior de la bobina B se convierte en un polo N más fuerte.
Dado que las escobillas cortocircuitan ambos extremos de la bobina C, no fluye corriente ni se genera ningún campo magnético.
También en este caso la bobina está sometida a una fuerza de rotación en sentido contrario a las agujas del reloj.
De ③ a 4, la bobina superior continúa sometida a una fuerza hacia la izquierda y la bobina inferior continúa sometida a una fuerza hacia la derecha, continuando girando en sentido antihorario.
Cada vez que la bobina gira 30 grados a los estados ③ y ④, el lado exterior de la bobina se convierte en un polo S cuando la bobina está ubicada sobre el eje horizontal central, y un polo N cuando la bobina está ubicada debajo de él, ejecutando repetidamente este movimiento. .
En otras palabras, la bobina superior recibe repetidamente una fuerza hacia la izquierda y la bobina inferior recibe repetidamente una fuerza hacia la derecha (ambas en sentido antihorario). Esto hace que el rotor gire continuamente en sentido antihorario.
Si la fuente de alimentación está conectada al cepillo izquierdo opuesto (-) y al cepillo derecho (+), la bobina genera un campo magnético en la dirección opuesta y la dirección de la fuerza aplicada a la bobina se invierte, provocando una rotación en el sentido de las agujas del reloj.
Además, cuando se corta la fuente de alimentación, el rotor del motor con escobillas deja de girar porque no hay un campo magnético que lo mantenga girando.
5. Motor trifásico sin escobillas de onda completa
Aspecto y estructura del motor trifásico sin escobillas de onda completa.
La siguiente figura muestra un ejemplo de la apariencia y estructura de un motor sin escobillas.

A la izquierda hay un ejemplo de un motor de husillo para hacer girar discos en un dispositivo de reproducción de discos. Hay un total de nueve bobinas, que constan de tres fases multiplicadas por tres.
A la derecha hay un ejemplo de un motor de husillo para un dispositivo FDD, que tiene 12 bobinas (tres fases por cuatro). Las bobinas se fijan a la placa de circuito y se enrollan alrededor de un núcleo de hierro.
El componente en forma de disco a la derecha de la bobina es un rotor de imán permanente. El borde exterior está formado por un imán permanente y el eje del rotor se inserta en el centro de la bobina y cubre parte de ella. El imán permanente gira alrededor del borde exterior de la bobina.
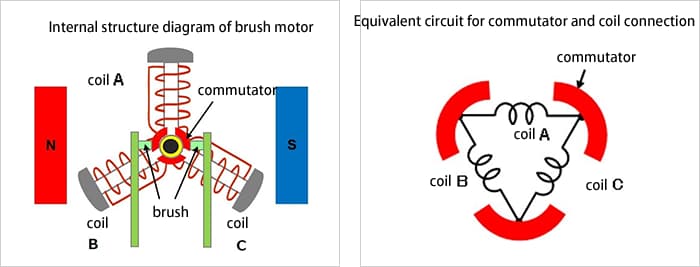
El diagrama de la estructura interna de un motor trifásico sin escobillas de onda completa y el circuito equivalente para las conexiones de la bobina.
A continuación se muestran diagramas simplificados de la estructura interna y el circuito equivalente para conexiones de bobinas.

El diagrama simplificado muestra un motor de 2 polos (2 imanes) y 3 ranuras (3 bobinas) con estructura simple. Es similar a una estructura de motor con escobillas con el mismo número de polos y ranuras, pero el lado de la bobina está fijo mientras que los imanes pueden girar. Por supuesto, no hay pinceles.
En este caso, las bobinas están conectadas en una configuración en forma de Y y se utilizan componentes semiconductores para suministrar corriente a las bobinas. El flujo de corriente se controla en función de la posición de los imanes giratorios.
En este ejemplo, se utilizan elementos Hall para detectar la posición de los imanes. Los elementos Hall se colocan entre las bobinas y detectan el voltaje generado por la intensidad del campo magnético, que se utiliza como información de posición. En la imagen del motor de husillo para el dispositivo FDD proporcionada anteriormente, también se pueden ver elementos Hall entre las bobinas para la detección de posición (encima de las bobinas).
Los elementos Hall son sensores magnéticos bien conocidos que convierten el tamaño del campo magnético en el tamaño del voltaje y representan la dirección del campo magnético con voltaje positivo o negativo.
A continuación se muestra un diagrama esquemático que ilustra el efecto Hall.
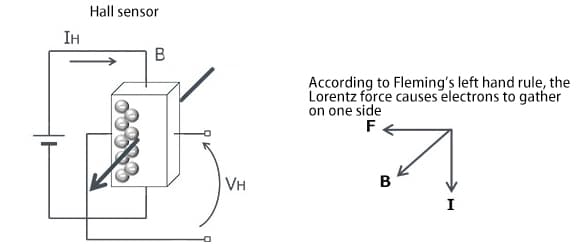
El elemento Hall utiliza el fenómeno de que “cuando una corriente IH pasa a través de un semiconductor y un flujo magnético B pasa perpendicular a la corriente, se genera un voltaje VH en la dirección perpendicular a la corriente y al campo magnético”. El físico estadounidense Edwin Herbert Hall descubrió este fenómeno y lo llamó “efecto Hall”. El voltaje generado VH se expresa mediante la siguiente fórmula:
VH = (KH/d)・IH・B
※KH: coeficiente Hall, d: espesor de la superficie de penetración del flujo magnético
Como se muestra en la fórmula, cuanto mayor es la corriente, mayor es el voltaje. Esta característica se usa comúnmente para detectar la posición del rotor (imán).
Principio de rotación de motores trifásicos sin escobillas de onda completa.
El principio de rotación de un motor sin escobillas se explicará ahora en los pasos 1 a 6. Para facilitar la comprensión, el imán permanente se ha simplificado de una forma circular a una forma rectangular.
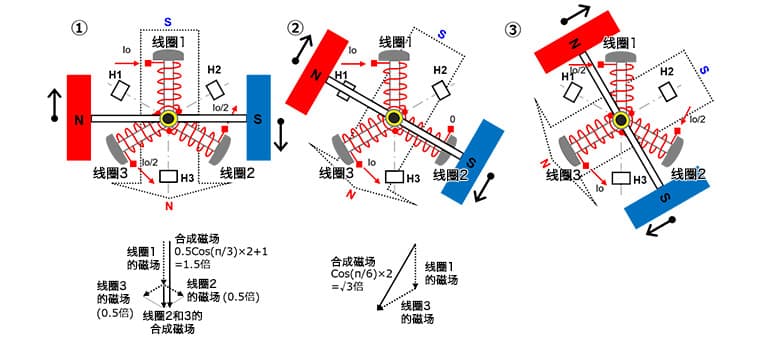
① En un sistema de bobina trifásico, la bobina 1 está fijada en la posición de las 12 en punto, la bobina 2 está fijada en la posición de las 4 en punto y la bobina 3 está fijada en la posición de las 8 en punto en la esfera del reloj. Un imán permanente de 2 polos con el polo N a la izquierda y el polo S a la derecha es capaz de girar.
Pase una corriente Io a través de la bobina 1 para producir un campo magnético de polo S en el exterior de la bobina. Pase una corriente de Io/2 a través de las bobinas 2 y 3 para producir un campo magnético de polos N en el exterior de la bobina.
Cuando los campos magnéticos de las bobinas 2 y 3 se combinan vectorialmente, se produce un campo magnético de polo N que apunta hacia abajo. Este campo magnético es 0,5 veces el campo magnético producido por la corriente Io que pasa a través de una sola bobina, y cuando se suma al campo magnético de la bobina 1, se vuelve 1,5 veces más fuerte. Esto produce un campo magnético combinado perpendicular al imán permanente, que genera un par máximo y hace que el imán permanente gire en el sentido de las agujas del reloj.
A medida que la corriente a través de la bobina 2 se reduce y la corriente a través de la bobina 3 aumenta según la posición de rotación, el campo magnético combinado también gira en el sentido de las agujas del reloj, lo que hace que el imán permanente continúe girando.
② En un estado girado 30 grados, una corriente Io pasa a través de la bobina 1, haciendo que la corriente en la bobina 2 sea cero y provocando que la corriente Io fluya fuera de la bobina 3.
La parte exterior de la bobina 1 se convierte en un polo S y la parte exterior de la bobina 3 se convierte en un polo N. Cuando se combinan vectorialmente, el campo magnético producido es √3 (≈1,72) veces más fuerte que el campo magnético producido por la corriente Io que la atraviesa. una sola bobina. Esto también produce un campo magnético combinado perpendicular al imán permanente, que gira en el sentido de las agujas del reloj.
A medida que cambia la posición de rotación, la corriente que fluye hacia la bobina 1 se reduce, la corriente que fluye hacia la bobina 2 comienza en cero y aumenta, y la corriente que fluye hacia la bobina 3 aumenta hasta Io. Como resultado, el campo magnético combinado también gira en el sentido de las agujas del reloj, lo que hace que el imán permanente siga girando.
※ Suponiendo que cada corriente de fase es una onda sinusoidal, el valor actual aquí es Io × sin (π⁄3) = Io × √3⁄2. Mediante la combinación vectorial de campos magnéticos, la magnitud total del campo magnético es 1,5 veces el campo magnético producido por una sola bobina.
Cuando cada corriente de fase es una onda sinusoidal, independientemente de la posición del imán permanente, la magnitud del campo magnético combinado vectorialmente es siempre 1,5 veces el campo magnético producido por una sola bobina, y el campo magnético es perpendicular al campo magnético de El imán permanente. campo en un ángulo de 90 grados.
③ En una rotación continua de 30 grados, una corriente de Io/2 fluye a través de la bobina 1, una corriente de Io/2 fluye a través de la bobina 2 y una corriente de Io sale de la bobina 3.
La parte exterior de la bobina 1 se convierte en un polo S, la parte exterior de la bobina 2 también se convierte en un polo S y la parte exterior de la bobina 3 se convierte en un polo N. Cuando se combinan vectorialmente, el campo magnético producido es 1, 5 veces el magnético. Campo producido cuando una corriente de Io pasa a través de una sola bobina (igual que en el paso 1). Esto también produce un campo magnético combinado perpendicular al campo magnético del imán permanente en un ángulo de 90 grados y girando en el sentido de las agujas del reloj.

④-⑥
Continúe girando de la misma manera que en los pasos 1-3.
De esta manera, si la corriente que fluye hacia las bobinas cambia continuamente según la posición del imán permanente, el imán permanente girará en una dirección fija. Asimismo, si la corriente fluye en dirección opuesta y se invierte la dirección del campo magnético combinado, la rotación será en sentido contrario a las agujas del reloj.
El siguiente diagrama muestra la corriente que fluye a través de cada bobina para cada paso del 1 al 6.
A través de la explicación anterior, ahora se debe entender la relación entre los cambios actuales y la rotación.

6. Motor paso a paso
Un motor paso a paso es un tipo de motor que se puede controlar con precisión en términos de ángulo de rotación y velocidad sincronizándolo con una señal de pulso. Los motores paso a paso también se conocen como “motores de impulsos”.
Debido a su capacidad para lograr un posicionamiento preciso sin el uso de sensores de posición y solo con control de bucle abierto, los motores paso a paso se utilizan ampliamente en equipos que requieren posicionamiento.
Estructura de motor paso a paso (bipolar bifásico)
Las siguientes imágenes, de izquierda a derecha, muestran ejemplos de cómo luce un motor paso a paso, un diagrama esquemático de su estructura interna y un diagrama conceptual de su estructura.

En el ejemplo de apariencia, se muestran los tipos de motores paso a paso HB (híbrido) y PM (imán permanente). El diagrama esquemático del medio también muestra la estructura de los tipos HB y PM.
Un motor paso a paso tiene una estructura en la que se fijan las bobinas y gira el imán permanente. El diagrama conceptual de la estructura interna del motor paso a paso de la derecha es un ejemplo de un motor PM con bobinas bifásicas (dos juegos).
En el ejemplo de la estructura básica del motor paso a paso, las bobinas están dispuestas en el exterior y el imán permanente en el interior. Además del tipo bifásico, existen tipos con más fases como el trifásico y el pentafásico.
Algunos motores paso a paso tienen estructuras diferentes, pero para explicar el principio de funcionamiento básico de los motores paso a paso, este artículo presenta el motor paso a paso con la estructura básica de bobinas fijas e imanes permanentes giratorios.
Principio de funcionamiento básico del motor paso a paso (excitación monofásica)
El siguiente diagrama se utiliza para explicar el principio de funcionamiento básico del motor paso a paso. Este es un ejemplo de cómo excitar cada fase (un conjunto de bobinas) de las bobinas bipolares de dos fases que se muestran en la imagen anterior, suponiendo un cambio de estado de ① a ④. Las bobinas están formadas por las bobinas 1 y 2, y la flecha de corriente indica la dirección del flujo de corriente.
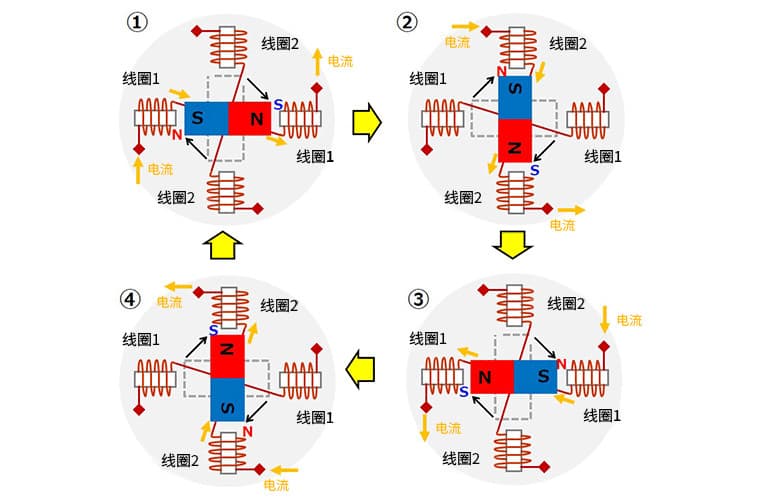
①
La corriente eléctrica fluye desde el lado izquierdo de la bobina 1 y sale por el lado derecho.
No permita que la corriente eléctrica fluya a través de la bobina 2.
En este punto, el interior de la bobina izquierda 1 se convierte en Norte y el interior de la bobina derecha 1 se convierte en Sur.
Como resultado, el imán permanente del medio es atraído por el campo magnético de la bobina 1 y se detiene en un estado en el que el lado izquierdo es el sur y el lado derecho es el norte.
②
Detenga la corriente en la bobina 1 y permita que la corriente fluya desde la parte superior de la bobina 2 y salga por la parte inferior.
El interior de la bobina superior 2 se vuelve Norte y el interior de la bobina inferior 2 se vuelve Sur.
El imán permanente es atraído por su campo magnético, gira 90° en el sentido de las agujas del reloj y se detiene.
③
Detenga la corriente en la bobina 2 y deje que la corriente fluya desde el lado derecho de la bobina 1 y salga por el lado izquierdo.
El interior de la bobina izquierda 1 se convierte en Sur y el interior de la bobina derecha 1 se convierte en Norte.
El imán permanente es atraído por su campo magnético, gira otros 90° en el sentido de las agujas del reloj y se detiene.
④
Detenga la corriente en la bobina 1 y permita que la corriente fluya desde la parte inferior de la bobina 2 hacia la parte superior.
El interior de la bobina superior 2 se vuelve Sur y el interior de la bobina inferior 2 se vuelve Norte.
El imán permanente es atraído por su campo magnético, gira otros 90° en el sentido de las agujas del reloj y se detiene.
Al cambiar la corriente que fluye a través de las bobinas en el orden de los pasos ① a ④ usando circuitos electrónicos, se puede girar el motor paso a paso. En este ejemplo, cada acción de conmutación hará girar el motor paso a paso 90°.
Además, al hacer fluir corriente continuamente a través de una bobina específica, el motor paso a paso puede mantener su posición estacionaria y tener un par de retención. Cabe mencionar que invertir el orden de la corriente que fluye por las bobinas puede hacer que el motor paso a paso gire en la dirección opuesta.