As versões recentes do SIMULINK possuem pacote de suporte para Arduíno (UNO, Mega2560, etc.), BeagleBone, etc. Isso tornou mais fácil simular e enviar os designs diretamente para o quadro.
Neste projeto, usaremos o Ferramenta SIMULINK para piscar um LED conectado ao nosso Arduino UNO.
É uma ferramenta baseada em diagrama de blocos na qual não há necessidade de escrever um código em C ou algo assim, em vez disso, o modelo de diagrama de blocos é convertido diretamente e carregado na placa por ferramentas MATLAB. Para começar, iremos gerar um código LED Blink e executá-lo no Arduino-UNO.
Mas antes de começar, você precisa verificar alguns pré-requisitos. Seu computador deve ter Matlab-R2013 ou superior (este tutorial está no MATLAB-R2014a). Se você tiver a versão de estudante do MATLAB -2013 ou 2014, servirá.
Agora precisamos instalar o Arduino Support Package do site oficial do MathWorks,
Depois de concluir as etapas acima, vamos começar a criar o design do nosso sistema:Quando você abre o MATLAB, aparece uma tela com várias janelas incorporadas, viz. Janela de comando, etc. Selecione a biblioteca SIMULINK na barra de menu da janela principal.
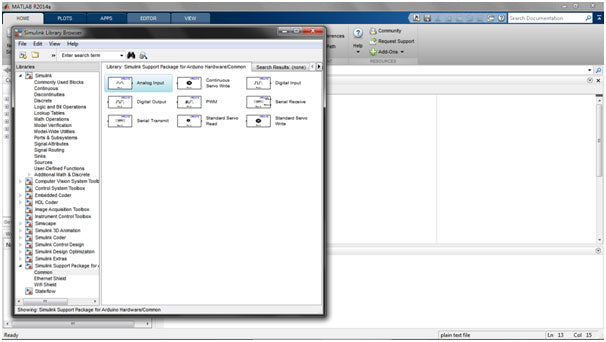
Você verá uma tela pop-up como segue:

Vá para 'Simulink Support Package for Arduino' e você verá uma tela como acima.
Cont..
Selecione Saída Digital na lista para controlar o LIDERADO. Clique com o botão direito e selecione 'Adicionar a um novo modelo'.
Depois disso, você verá uma janela do modelo Simulink conforme mostrado abaixo:


Depois disso, precisamos gerar um pulso, o que ligará e desligará nosso LED. Para obter isso, clique novamente em Biblioteca Simulink. Vá para 'Fontes' e selecione Gerador de pulso da lista e adicione-o ao modelo clicando com o botão direito nele.

Conecte os dois blocos entre si. Agora clique duas vezes em 'Gerador de pulso' para editar suas propriedades. Você pode definir o atraso, o tempo de amostragem, etc., de sua escolha. Como exemplo, você pode definir os mostrados abaixo:

Depois de concluir as etapas acima, definiremos o 'Hardware de destino' e definiremos suas propriedades. Vá para 'Ferramentas' na barra de menu e selecione 'Execute no hardware de destino', uma janela pop-up aparecerá, conforme mostrado abaixo:

Selecione o hardware alvo (digamos Arduino UNO) e escolha a porta COM. Você pode selecioná-lo manualmente se não funcionar automaticamente.

Selecione 'Aplicar' e clique em OK. Parabéns…!!!
Estamos a apenas um passo de distância. Na barra de menu, selecione a opção 'Implantar em hardware'.
Se mostrar erros, verifique novamente a porta COM do Gerenciador de dispositivos->Portas.
Como uma extensão do sistema acima, você pode adicionar dispositivos de entrada, adicionar lógica ao seu projeto ou projetar seu primeiro robô seguidor de linha no Simulink..!!!