
ABSTRATO:
No presente trabalho, gire o volante, as rodas dianteiras giram de acordo, e o carro muda de direção. Como isso acontece, no entanto, não é tão simples. Bem, costumava ser na época em que os carros eram chamados de carruagens sem cavalos, mas hoje em dia, não tanto. O sistema de juntas de direção é onde os próprios eixos, que são montados em juntas, saem e se afastam do kart, e eles realmente giram em torno desses pivôs, e fazem as rodas girarem usando um cilindro hidráulico de ação única.
E também usando a lei de Pascal movendo o cilindro hidráulico de simples ação. Em nosso projeto simplificamos o sistema ao incluir os acessórios da engrenagem helicoidal que acionam a rotação dada pelo volante. Junto com a configuração da roda sem-fim, um potenciômetro é incluído para aumentar a potência de rotação obtida do volante para a rotação do motor DC, de modo que acione o arranjo da roda sem-fim para ativar na velocidade normal para realizar a ativação das rodas para controle do veículo.
INTRODUÇÃO:
O Wheel Steering System é empregado em veículos para obter melhor manobrabilidade em altas velocidades, reduzindo o raio do círculo de giro do carro e para reduzir o esforço de direção do motorista. Na maioria dos sistemas de direção de 4 rodas ativos, o computador de orientação ou equipamento eletrônico desempenha um papel importante, em nosso projeto tentamos manter o mecanismo o mais mecânico possível, o que pode ser fácil de fabricar e manter.
Este projeto concentra-se em um design mecanicamente viável e inovador envolvendo um sistema duplo de cremalheira e pinhão para rodas traseiras encerradas em uma carcaça, conectada à coluna de direção por uma combinação de um conjunto de engrenagem cônica e eixo telescópico. O movimento das rodas traseiras é feito pelo movimento dos pinhões traseiros que, por sua vez, movem o fuso recém-projetado para atingir o movimento necessário das rodas traseiras.
LAYOUT 2D DO SISTEMA DE DIREÇÃO ATIVA:
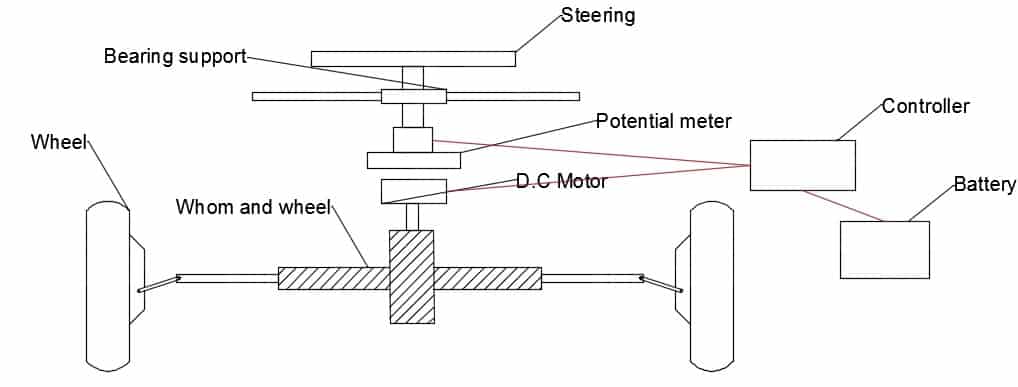 projeto e fabricação de sistema de direção ativa
projeto e fabricação de sistema de direção ativaPrincípio de trabalho:
O sistema de trabalho consiste em um arranjo de volante que é conectado a um eixo por meio de parafusos sem-fim e fixações de rodas, o eixo é ligado às rodas por meio de diversas ligações, de modo que a ativação do volante faz com que a roda se mova da esquerda para a direita com base na conveniência do motorista. Para aumentar sua eficiência, o motor DC é acoplado a um arranjo que é alimentado por meio de distúrbios do potenciômetro causados pela ativação do volante quando o volante é inclinado em determinado ângulo e então os distúrbios são transferidos para o potenciômetro que aumenta o rotação e tende a girar o DC
motor na velocidade necessária para a ativação do arranjo de roda sem-fim. Portanto o manuseio deste sistema é fácil e eficiente quando comparado ao existente.
VANTAGENS:
- O comportamento do veículo nas curvas torna-se mais estável e controlável em altas velocidades, bem como em superfícies molhadas ou escorregadias.
- A resposta do veículo aos comandos da direção se torna mais rápida e precisa em toda a faixa de velocidade do veículo.
- A estabilidade em linha reta do veículo em altas velocidades foi melhorada.
- Os efeitos negativos das irregularidades da estrada e dos ventos laterais na estabilidade do veículo são minimizados.
- É menos provável que o veículo gire mesmo em situações em que o motorista precise fazer uma mudança de direção repentina e relativamente grande.
- Ao direcionar as rodas traseiras na direção oposta às rodas dianteiras em baixas velocidades, o raio do círculo de viragem do veículo é bastante reduzido. Portanto, a fabricação de veículos em estradas estreitas e durante o estacionamento torna-se mais fácil.
FORMULÁRIOS:
- Para aplicação em automóveis, especialmente para veículos de quatro rodas.







