
Estrutura e Princípio de Funcionamento da Grade.
1. Estrutura da grade

Grade – muitas pequenas listras (linhas gravadas) de igual distância e alternando brilho e escuridão são gravadas uniformemente em uma superfície de vidro revestida.
a – é a largura das linhas da grade (não transparente)
b – é a largura do espaço entre as linhas da grade (transparente)
a+b=W passo da grade (também conhecido como constante da grade)
Normalmente, a=b=W/2, mas também pode ser gravado como a:b=1.1:0.9.
As grades comumente usadas são gravadas com 10, 25, 50, 100 ou 250 linhas por milímetro.
2. Princípio de medição da grade
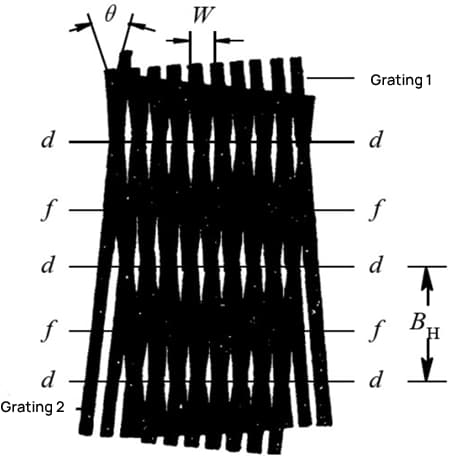
Franjas moiré – Quando duas grades de passo igual (Grade 1 e Grade 2) são sobrepostas face a face, deixando uma pequena lacuna no meio, e o pequeno ângulo da grade θ é formado entre as duas linhas da grade, listras brilhantes e escuras alternadas aparecem no direção próxima à linha vertical da grade.
Na linha dd, as duas linhas de grade se sobrepõem, e a área transparente é a maior, formando a faixa brilhante da faixa – que consiste em uma série de padrões de losango.
Na linha ff, as duas linhas gradeadas são deslocadas, formando a faixa escura da faixa – consistindo em alguns padrões de linhas cruzadas pretas.
A medição do deslocamento da franja moiré tem as três características a seguir:
(1) Efeito de amplificação do deslocamento
Largura da faixa BH – quando a grade se move para frente ou para trás em um passo da grade, as franjas moiré se movem para frente ou para trás em uma largura de faixa.
A relação entre BH e θ:
À medida que θ diminui, BH aumenta. Portanto, W é amplificado por 1/θ. Por exemplo, quando θ=0,1°, 1/θ=573, significa que BH é 573 vezes o passo da grade W. Isso significa que a grade tem um efeito de amplificação de deslocamento, aumentando assim a sensibilidade da medição.
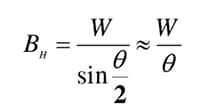
(2) Direção do Movimento Moire Fringe
Quando a Grade 1 se move para a direita ao longo da linha de corte na direção vertical, as franjas Moiré se movem para cima ao longo das linhas de grade da Grade 2. Por outro lado, quando a Grade 1 se move para a esquerda, as franjas Moiré se movem para baixo ao longo das linhas de grade da Grade 2. Portanto, a direção do movimento da Rede 1 pode ser identificada como a direção do movimento da franja Moiré →.
(3) O efeito médio do erro
As franjas moiré são formadas pelo grande número de linhas gravadas em uma grade e têm um efeito contrário ao erro gravado das linhas. Este efeito pode reduzir significativamente a influência dos erros de curto prazo.
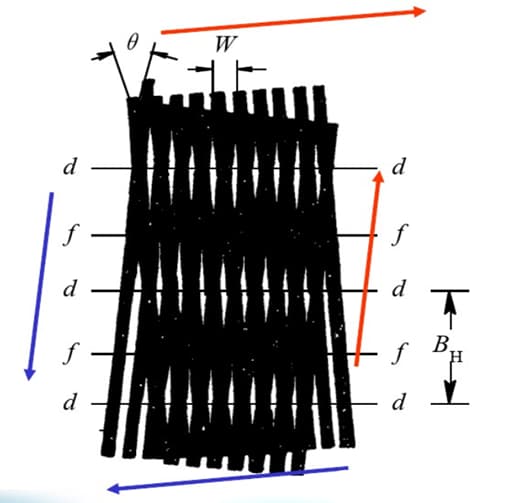
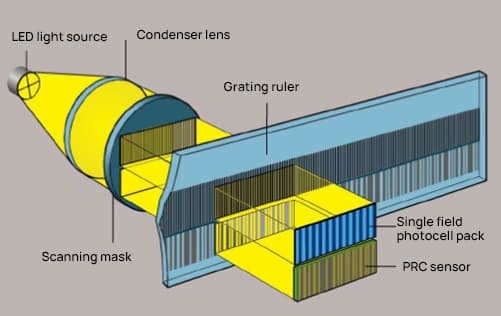
Composição de sensores de grade
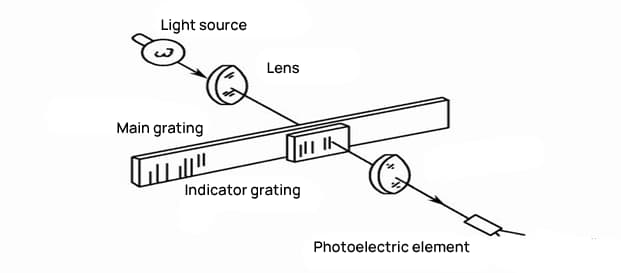
Cabeça de leitura de grade: Utiliza o princípio das grades para converter a quantidade de entrada (deslocamento) em um sinal elétrico correspondente.
Componentes: Grade de régua, grade indicadora, sistema de caminho óptico, elementos fotoelétricos, etc.
Tela digital gradeada: Para discernir a direção do deslocamento, aumentar a precisão da medição e permitir a exibição digital, o sinal de saída do cabeçote de leitura da grade deve ser convertido em um sinal digital.
Componentes: Circuito de amplificação de modelagem, circuito de subdivisão, circuito de discriminação direcional e circuito de exibição digital, etc.
Estrutura da régua de grade fechada
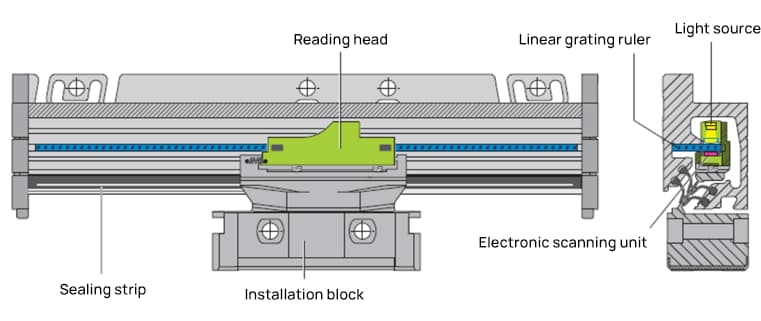
A régua de grade consiste em um corpo de escala fixo e uma cabeça de leitura móvel.
O corpo da balança fixa é um invólucro de alumínio projetado para proteger a régua, a unidade de digitalização e os trilhos-guia internos contra danos causados por lascas, poeira ou respingos de água.
A cabeça de leitura móvel consiste em uma unidade de digitalização, um conector de precisão e um bloco de instalação. O conector de precisão conecta a unidade de digitalização ao bloco de instalação, o que compensa pequenos erros mecânicos nos trilhos-guia.
Função e vantagens da régua de grade
A régua de grade linear é usada para medir a posição do movimento do eixo linear. Como mede diretamente a posição mecânica, pode refletir com precisão a posição real da máquina-ferramenta.
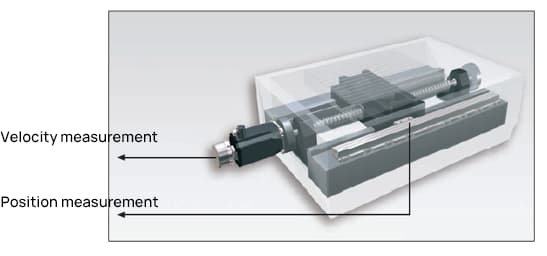
Ao usar a régua de grade linear para medir a posição da corrediça, o circuito de controle de posição inclui todos os mecanismos de alimentação. Este é o modo de controle de malha fechada. O erro de movimento mecânico é detectado pela régua de grade linear na placa deslizante e corrigido pelo circuito do sistema de controle.
Portanto, pode eliminar erros potenciais de múltiplas fontes:
- Erro de posicionamento causado pelas características de temperatura do fuso de esferas e dos trilhos-guia
- Erro reverso do fuso de esfera
- Erro característico de movimento causado por erro de passo do fuso de esferas
Aplicações de réguas de grade
Equipamento de processamento: tornos, fresadoras, mandriladoras, retificadoras, furadeiras, máquinas EDM, corte de fio, centros de usinagem, etc.
Instrumentos de medição: projetores, instrumentos de medição de imagem, microscópios de ferramentas, etc.
Também pode compensar erros no movimento da ferramenta em máquinas-ferramentas CNC
Equipado com PLC para medição de deslocamento em diversos mecanismos automatizados.
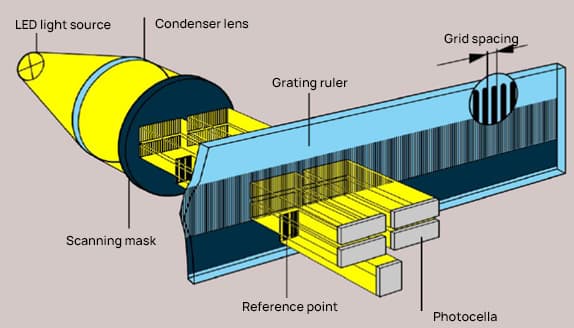
Princípio de medição da régua de grade
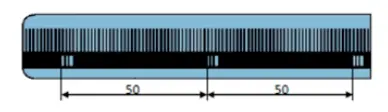
Régua de grade incremental
O princípio de medição da régua de grade incremental é modular a luz através de duas grades que se movem mutuamente em franjas Moiré. Contando e subdividindo as franjas de Moiré, obtém-se a variação do deslocamento. A posição absoluta é determinada definindo um ou mais pontos de referência na grade de escala.
Características:
A régua de grade tem vantagens como estrutura simples, longa vida útil mecânica, alta confiabilidade, forte capacidade anti-interferência, longa distância de transmissão, alta precisão e baixo custo.
No entanto, os sensores de grade incremental também apresentam deficiências. As réguas de grade incrementais só podem gerar a posição relativa da rotação do eixo.
O ponto de referência deve ser definido sempre que a energia for desligada ou reiniciada e houver algum erro de subdivisão no método de processamento de sinal.
Régua de grade absoluta
O princípio de medição da régua de grade absoluta é codificar diretamente os dados de posição absoluta na forma de códigos na grade, por meio de linhas tremeluzentes de grade em diferentes larguras e espaçamentos na régua de grade.
O equipamento eletrônico subsequente pode obter informações de posição enquanto a régua da grade está ligada.
Vantagens:
As informações de posição atual podem ser obtidas diretamente após a inicialização, sem a necessidade de uma operação de “zeramento”, simplificando o projeto do sistema de controle. O cálculo da posição absoluta é concluído no cabeçote de leitura sem a necessidade de circuitos de subdivisão subsequentes. O uso da tecnologia de comunicação serial bidirecional garante uma comunicação confiável.
Tipos de pontos de referência
A posição absoluta da régua da grade é determinada usando marcadores de referência (posições zero).
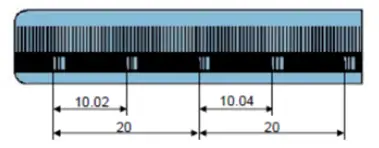
Para encurtar a distância para retornar à posição zero, a Heidenhain projetou marcadores de referência codificados por distância dentro do comprimento de medição.
A posição absoluta da régua da grade pode ser determinada cada vez que dois marcadores de referência (com uma distância determinada por algoritmos matemáticos) são passados.
Encoders com pontos de referência codificados por distância possuem a letra “C” após o número do modelo (por exemplo, LS 487C).
Ponto de referência único

Pontos de referência equidistantes.
Ponto de referência codificado por distância/tipo C.
| Ciclo de sinal | número de incremento nominal | distância máxima de deslocamento | |
| SE | 4μm | 5.000 | 20mm |
| LS | 20μm | 1000 | 20mm |
| LIBRA | 40μm | 2000 | 80mm |
Escala linear absoluta não referenciada

Classificação de Sinais de Escalas Lineares
Sinal absoluto: Endat, série Fanuc, Siemens, Mitsubishi, Panasonic, etc.
Sinal incremental: sinal de onda senoidal (sinal de 1 Vpp), sinal de onda quadrada (sinal TTL).
Especificações Técnicas de Escalas Lineares
1. Passo da grade:
A escala linear emite sinais elétricos e o passo da grade refere-se às linhas físicas da grade na escala linear. Cada vez que a escala linear se move uma distância igual ao passo da grade, o sinal elétrico de saída muda um ciclo.
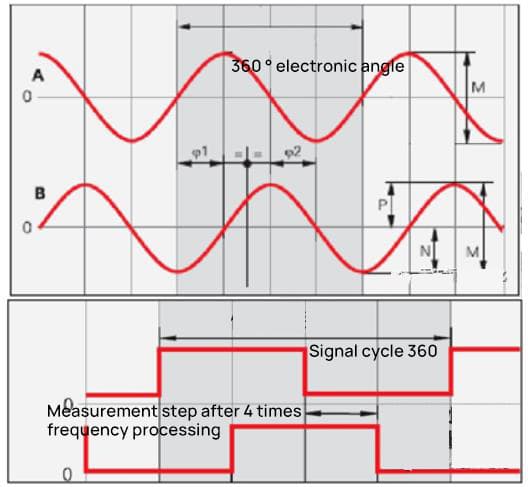
Exemplo: Quando o passo da grade é 20um, se a escala linear se mover uma distância de 20um, a escala linear produzirá uma onda senoidal com mudança de fase de 360° e diferença bifásica de 90°.
2. Ciclo de sinal:
Com o desenvolvimento da tecnologia de medição, agora é possível usar circuitos de multiplicação de frequência no cabeçote de leitura de escala linear para multiplicar a onda senoidal gerada por cada sinal de linha de grade.
Portanto, o ciclo de saída do sinal da escala linear pode ser refinado. O sinal após ser multiplicado pela cabeça de leitura é muito mais denso do que o sinal da linha de grade original, e o comprimento do sinal densificado é chamado de ciclo do sinal.
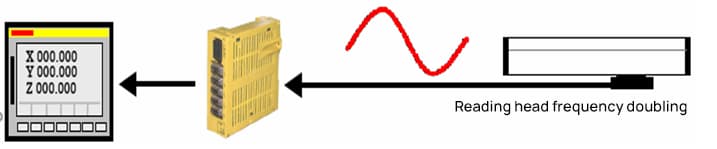
Se o cabeçote de leitura não tiver capacidade de multiplicação de frequência, o passo da grade será igual ao ciclo do sinal.
3. Multiplicação de frequência:
A multiplicação de frequência pode ser entendida como a densificação do sinal original. A multiplicação de frequência pode encurtar o período de uma onda senoidal, encurtar a distância medida correspondente a cada período e melhorar a precisão da medição.
Os métodos comuns de multiplicação de frequência incluem: multiplicação de frequência de cabeça de leitura, instrumentos pós-multiplicação (fornecidos por fabricantes de escala linear, semelhantes a pré-amplificadores, usados para amplificação de sinal e multiplicação de frequência), multiplicação de frequência de sistemas CNC, etc.
4. Etapa de medição:
Sinais de onda senoidal que passaram pela multiplicação de frequência são usados para medir a posição. Devido às limitações no processo de fabricação, nível de erro e capacidade de processamento do circuito de registro de posição da escala linear, é impossível multiplicar infinitamente o sinal original do passo da grade.
Portanto, os fabricantes de balanças lineares possuem uma etapa de medição recomendada para cada tipo de balança linear. Este valor refere-se à distância mínima medida que a escala linear pode tolerar. Dentro desta faixa de passos de medição, a precisão de medição nominal da escala linear pode ser alcançada.
Comparado aos sistemas CNC, esta etapa de medição geralmente é a unidade mínima de instrução do sistema. Da mesma forma, esta especificação técnica também especifica a precisão de medição (resolução) da escala linear.
5. Resolução:
A precisão da medição refere-se à mudança mínima de comprimento que a escala linear pode ler e produzir, como 5um, 1um, 0,5um, 0,1um.
6. Precisão da medição:
A precisão da medição refere-se à precisão dos dados do sinal emitidos pela escala linear em relação ao comprimento real que está sendo medido.
Erro de posição dentro de toda a faixa de medição: Se o valor máximo do erro de posição estabelecido com base no valor médio dentro de qualquer faixa de medição de 1 m de comprimento estiver dentro de ±a, então ±a um é o nível de precisão.
Em escalas lineares fechadas, estes dados refletem a precisão da escala linear, incluindo a cabeça de leitura, ou seja, a precisão do sistema. (Heidenhain: ±0,1, ±0,2, ±0,5, ±1, ±2, ±3, ±5, ±10, ±15um)
Erro de posição dentro de um único ciclo de sinal:
O desvio de posição dentro de um único ciclo de sinal é determinado pela qualidade da grade, qualidade de varredura e ciclo de sinal da escala linear. O erro de posição dentro de um único ciclo de sinal está geralmente na faixa de ±2% a ±0,5% do ciclo de sinal.
Quanto menor for o ciclo do sinal, menor será o erro dentro de um único ciclo de sinal. Isto é muito importante para a precisão do posicionamento durante a câmera lenta e movimento do eixo e controle de velocidade durante o movimento do eixo, o que determina a qualidade da superfície e a qualidade das peças processadas.
| O ciclo de sinal do sinal de varredura | O erro máximo de interpolação dentro de um único ciclo de sinal | |
| Flórida | 4μm | 0,08 μm |
| LC181 | 16μm | 0,3μm |
| LC481 | 20 μm | 0,4μm |
| LS | 20 μm | 04 μm |
| LIBRA | 40 μm | 0,8μm |
Fatores a serem considerados ao selecionar uma escala linear
- Medindo comprimento.
- Interface de sinal: 1Vpp, TTL, HTL, escala linear absoluta.
- Passo de grade.
- Medindo velocidade.
- Nível de precisão e resolução.
- Espaço para posição de instalação.
- Método de estabelecimento de pontos de referência.







