Este tutorial é sobre como controlar o motor de passo por WiFi por meio de um navegador desktop ou móvel usando o módulo WiFi nodemcu esp8266. Nodemcu funcionará como um servidor e servirá uma página web. A página da Web contém os botões de controle do motor de passo. O motor de passo executa etapas para completar uma rotação completa de 360 graus. O número de passos necessários para completar uma rotação completa depende do ângulo de passo específico do motor. Normalmente os ângulos de passo são de 0,9 graus e 1,8 graus por passo. Os motores de passo são capazes de fornecer alto torque em pequenos ângulos. Eles consomem alta potência para produzir alto torque. Seus pequenos passos os tornaram populares para uso em projetos onde é necessária alta precisão. Eles são popularmente usados na indústria automobilística. Motores de passo acionam braços robóticos usados na fabricação de automóveis. Braços de acionamento do motor de passo em um ângulo tão preciso que um braço pode inserir facilmente uma pequena porca nas peças do carro sempre que necessário. Os motores de passo também são a parte principal das impressoras 3D. Mesmo impressoras e drivers de disco normais usam motores de passo para girar os discos com precisão.
Motor de passo NEMA 17
Os motores de passo são motores CC sem escova. Os motores de passo são divididos em duas categorias gerais: motores de passo unipolares e motores de passo bipolares. Você pode encontrar muitos tutoriais na internet que explicam a diferença entre os dois. Para este projeto vou usar motor de passo bipolar. O motor de passo bipolar que vou usar no projeto é o NEMA 17. Nema 17 é um motor de passo popular de 4 fios e 2 bobinas. Seu ângulo de passo é de 1,8 graus. Portanto, para uma rotação completa são necessários 200 passos (200 x 1,8 = 360). O consumo normal de energia do NEMA 17 é de 5 a 12 volts e ele drena de 1 a 1,5 amperes de corrente contínua quando uma carga está conectada a ele.
Quatro fios do NEMA 17 têm cores diferentes. Normalmente os fios são vermelhos, azuis, verdes e pretos. Vermelho e azul representam a primeira bobina e verde e preto representam a segunda bobina. Em alguns motores, o azul é substituído por amarelo e o preto por cinza. Se você for usar o NEMA 17 em um projeto DIY, primeiro certifique-se de usar o par de bobinas correto com as cores.
Driver de motor de passo A4988
Os motores de passo consomem muita energia durante a movimentação de cargas. Quando não há carga, o consumo de corrente é drasticamente reduzido. Para fornecer a quantidade de energia discutida acima ao motor de passo (NEMA 17 12 volts 1,5 amperes), precisamos de uma fonte de alimentação externa. Com fonte de alimentação externa também precisamos de um circuito que possa controlar a rotação do motor de forma perfeita e fácil. Tradicionalmente, uma combinação de transistores ou mosfets conhecida como circuito H-Bridge é usada para controlar o motor de passo com microcontroladores. Fazer um circuito H-Bridge e testá-lo é uma tarefa demorada. Hoje em dia, uma variedade de placas H-Bridge pré-montadas ou drivers de controlador de motor estão disponíveis no mercado. Eles não são apenas baratos, mas também fáceis de trabalhar. Para este projeto decidi usar uma das placas de driver de motor de passo H-Bridge pré-montadas. O driver do motor de passo que selecionei para o projeto é o A4988. A4988 é um driver de motor de passo bipolar. Os requisitos de energia do A4988 são de 3,3 volts a 5 volts. Ele pode facilmente acionar um motor de passo de duas bobinas. A energia externa é fornecida a ele e seu circuito H-Bridge interno divide a energia entre as bobinas quando as bobinas são energizadas.
Expliquei cada pino do driver do motor de passo bipolar A4988 em outro tutorial. A configuração dos pinos e o modo de rotação mais íngreme do motor também são explicados no tutorial. Sugiro que você faça esse tutorial primeiro para se familiarizar com o driver A4988 e seus requisitos operacionais. Se você seguir aquele pequeno tutorial e sua parte no driver do motor A4988, poderá entender facilmente o código e o diagrama de circuito abaixo.
Configuração do pino do driver do motor de passo A4988 e requisitos de conexão
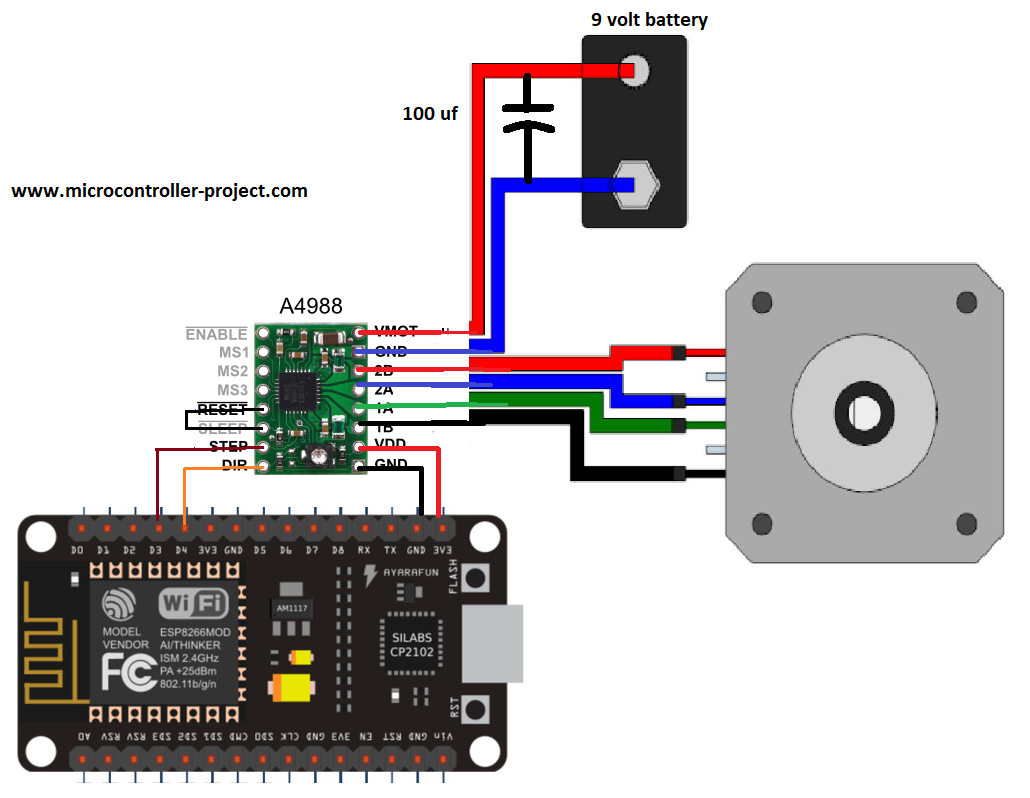
Diagrama do circuito do projeto
A bateria de 9 volts está conectada entre os pinos Vmot e gnd do driver do motor A4988. 9 volts são suficientes para energizar as bobinas NEMA 17. As bobinas do motor de passo são conectadas aos pinos 1A, 1B, 2A e 2B do driver do motor de passo A4988. O driver A4988 é alimentado por barramento de alimentação de saída nodemcu de 3,3 volts. O pino de passo do A4988 está conectado ao pino D3 ou GPIO-0 do nodemcu esp866 12e. O pino Dir do A4988 está conectado ao D4 do módulo WiFi nodemcu. Os pinos Reset e Sleep estão interconectados. Os pinos do modo A4988 Ms1, Ms2 e Ms3 são deixados abertos. Nesta configuração o motor é colocado em modo full step. O pino de ativação também fica aberto. Ele é puxado internamente para baixo e o módulo permanece sempre no modo habilitado. Mais uma vez, encorajo você a seguir o tutorial recomendado acima, caso contrário, você não conseguirá entender o circuito discutido anteriormente e o código que será discutido mais adiante.
Nodemcu esp8266 12 e controlando motor de passo via WiFi
Chegando ao código do projeto. Primeiro, a biblioteca ESP8266WiFi está incluída no código. Esta biblioteca inicializa o servidor e o WiFi do módulo WiFi nodemcu esp8266. É necessário o SSID e a SENHA do WiFi ao qual você deseja conectar seu módulo WiFi nodemcu. Será a senha WiFi do seu roteador doméstico e o SSID se você for testar o projeto DIY em casa. Digite a senha e o SSID no código antes de prosseguir. Digite o ssid e a senha entre aspas duplas.
const char* ssid = “Seu SSID”;
const char* senha = “Sua senha Wifi”;
A seguir são definidos os pinos de controle do A4988. O pino de passo do driver do motor de passo A4988 está conectado ao pino GPIO-0 ou D3 do módulo WiFi nodemcu. O pino de direção do A4988 está conectado ao GPIO-2 do pino D4 da placa nodemcu esp8266.
Na função de configuração, os pinos de controle são declarados como saída. O monitor serial Arduino ide é inicializado com taxa de transmissão de 115200. O servidor é iniciado e o IP da página da web é publicado. Falarei mais sobre isso depois do código. Na função loop, a lógica principal do programa está em execução. Na função de loop, o servidor está aguardando uma solicitação do cliente. Assim que o servidor recebe a solicitação do cliente, ele a manipula e responde à solicitação.
|
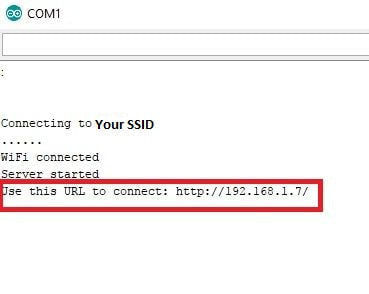
Basta fazer o circuito e baixar o código acima nele. Antes de enviar o código para o nodemcu, primeiro certifique-se de que a placa correta esteja selecionada. Depois de baixar o código no nodemcu, abra o monitor serial do arduino no ide do arduino. Assim que você abrir o monitor serial, você verá o nodemcu solicitando ao seu roteador uma atribuição de IP. Após a atribuição do IP, o nodemcu iniciará seu servidor. Após a inicialização do servidor, o endereço do servidor será impresso na janela do monitor serial. Este endereço é na verdade o endereço da página da web que contém os controles do motor de passo. Você deve inserir este endereço em seu navegador para acessar a página da web.
|
|
O exemplo de endereço de página da web HTTP é fornecido no canto superior direito. Uma coisa mais importante. Servidor (nodemcu, esp8266) e cliente (celular, desktop, laptop ou notebook) devem estar conectados à mesma rede WiFi. Se algum módulo cliente ou servidor estiver conectado a outra rede, a página da web não aparecerá em seu navegador. Depois de inserir o IP no navegador, a seguinte página da web aparecerá no navegador.
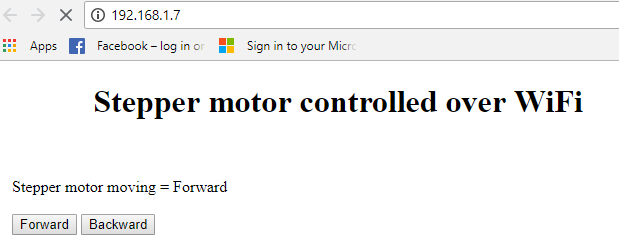
Controle WiFi de motor de passo com nodemcu esp8266
|
A página da Web possui dois botões, um para avançar e outro para trás. Se você pressionar o botão de avanço, o motor se moverá 50 passos por cabeça. Se você pressionar para trás, o motor mudará de direção e começará a dar 50 passos para trás. Lembre-se de que estamos usando o motor de passo NEMA 17 e são necessários 200 passos para completar uma rotação. Então, se eu mover o motor 50 passos em cada pressionamento de botão. Isso significa que estou movendo o eixo do motor de passo em 90 graus a cada pressionamento de botão. Um loop for é executado 50 vezes para permitir que o motor de passo dê 50 passos. Portanto, agora, em nosso caso, o motor de passo está dando 4 passos para completar a rotação de 360 graus ou 1 passo para mover 90 graus.
|

Contagem de ângulo de passos do motor de passo
|
Futuro Recomendações
Este tutorial é um tutorial simples sobre como controlar o motor de passo por WiFi usando o módulo WiFi nodemcu. No futuro, você poderá testar outros modos de rotação do motor de passo em etapas de 1/4, 1/8 e 1/16 micro etapas. Você também pode inserir etapas manualmente na página da web e mover o motor de acordo com o número inserido. Uma barra pode ser inserida na página web e a posição do motor pode ser controlada através dela usando a linguagem de desenvolvimento web AJAX.
Baixe o código do projeto. A pasta contém o arquivo .ino do código nodemcu arduino. O código é de código aberto e pode ser usado e alterado. Por favor, forneça-nos seu feedback sobre o tutorial.
Código/Arquivos