A figura acima mostra um diagrama do sistema. O motor de azimute (motor AZ) e o motor de elevação (motor EL) são mostrados. Os sensores são fixados aos eixos da antena conforme a antena parabólica muda de posição, a saída analógica do sensor muda.
Assim que a posição do sensor corresponder à posição inserida em termos de ângulo de azimute e ângulo de elevação, ambos os motores param de girar. Posteriormente, caso haja algum desvio na posição da antena por qualquer circunstância, ela atinge automaticamente a posição desejada por meio de motores. Se quisermos mudar a posição da antena (talvez para rastrear outro satélite), então mudamos o ângulo de azimute e o ângulo de elevação e, novamente, a antena se move para uma nova posição modificada.
Esta é a descrição do sistema real. É composto por motores grandes e pesados que podem suportar a carga, e o tamanho da antena parabólica giratória varia de 3 a 15 metros. O RVDT é escolhido (ou mesmo customizado) de acordo com o grau de rotação desejado da antena. Ele fornece saída de tensão analógica correspondente de acordo com as mudanças de posição da antena. Todo o sistema é calibrado com precisão para saída RVDT de acordo com a posição do ângulo da antena em ambas as dimensões.
Por exemplo, considere que o RVDT tem uma faixa angular de -45o a +45o, e a saída analógica correspondente é de 0 a 5 V. Isso significa que para uma mudança de ângulo de 90o, a variação da mudança de tensão é de 5V. Portanto, para cada grau de mudança no ângulo, a tensão de saída muda em 5/90 = 0,055 = 55 mV (aprox.). Se este RVDT for usado em um sistema de tal forma que, à medida que a antena se move de 0o a 90o, ele fornece uma saída de 0 a 5 V, então cada mudança de grau na posição da antena é detectada como uma mudança de ± 55 mV na saída de tensão. O sistema de controle detecta essa tensão e gera sinais para acionar os motores. Os motores e o mecanismo de engrenagem correspondente também são projetados para girar a antena na faixa de 0o a 90o (ou 180o ou até mais) em incrementos de 1o em ambas as dimensões. Geralmente, a faixa do ângulo de elevação é de 0o a 90o, e a faixa do ângulo de azimute pode ser de 0o a 180o ou até mesmo 360o.
É assim que o sistema real é projetado e funciona. Mas aqui discuti a demonstração de tal sistema.
Modelo de demonstração: –
A figura mostra a disposição do sistema. Existem dois motores. Ambos os motores são motorredutores DC de 12 V com velocidade de 10 RPM. O motor que gira o prato no plano horizontal é conhecido como motor de azimute, e outro motor o gira no plano vertical que é o motor de elevação. Dois sensores opto-interruptores são usados para fornecer feedback da posição angular do motor. Ele usa uma roda de codificação que é fixada no eixo de cada motor. A roda de codificação possui furos (ranhuras) em 10o, 20o, 30o, da mesma forma. A disposição é feita de forma que à medida que o motor gira, a roda também gira; seus orifícios passam pela abertura do sensor e geram um pulso. Isso significa que o sensor gera um pulso a cada 10o de rotação do motor. A própria figura descreve como todo o arranjo é feito, mas deixe-me discuti-lo passo a passo.
• Todo o sistema é montado sobre uma caixa de madeira que abriga o circuito e serve de base ou plataforma para todo o mecanismo.
• O 1º motor DC (motor azimutal) é fixado dentro de uma caixa de madeira por meio de parafusos e cavilhas. A roda de codificação (roda azimutal) é fixada com seu eixo conforme mostrado
• O sensor 1 MOC7811 (sensor de azimute) também é montado verticalmente usando um pequeno suporte de madeira na mesma plataforma de madeira de forma que os furos da roda de codificação de azimute passem pela abertura do sensor
• Uma tira de metal em formato AU com cerca de 2 polegadas de largura é soldada diretamente ao eixo do motor DC. um lado do formato de U é bastante longo para os outros, como mostrado.
• Esta tira é usada para montar o 2º motor DC e outro sensor. O 2º motor CC (motor de elevação) é montado na tira em U usando braçadeira de montagem e parafusos no lado mais curto, enquanto o sensor 2 (sensor de elevação) é fixado na extremidade do braço longo (lateral)
A figura acima mostra um diagrama do sistema. O motor de azimute (motor AZ) e o motor de elevação (motor EL) são mostrados. Os sensores são fixados aos eixos da antena conforme a antena parabólica muda de posição, a saída analógica do sensor muda.
Assim que a posição do sensor corresponder à posição inserida em termos de ângulo de azimute e ângulo de elevação, ambos os motores param de girar. Posteriormente, caso haja algum desvio na posição da antena por qualquer circunstância, ela atinge automaticamente a posição desejada por meio de motores. Se quisermos mudar a posição da antena (talvez para rastrear outro satélite), então mudamos o ângulo de azimute e o ângulo de elevação e, novamente, a antena se move para uma nova posição modificada.
Esta é a descrição do sistema real. É composto por motores grandes e pesados que podem suportar a carga, e o tamanho da antena parabólica giratória varia de 3 a 15 metros. O RVDT é escolhido (ou mesmo customizado) de acordo com o grau de rotação desejado da antena. Ele fornece saída de tensão analógica correspondente de acordo com as mudanças de posição da antena. Todo o sistema é calibrado com precisão para saída RVDT de acordo com a posição do ângulo da antena em ambas as dimensões.
Por exemplo, considere que o RVDT tem uma faixa angular de -45o a +45o, e a saída analógica correspondente é de 0 a 5 V. Isso significa que para uma mudança de ângulo de 90o, a variação da mudança de tensão é de 5V. Portanto, para cada grau de mudança no ângulo, a tensão de saída muda em 5/90 = 0,055 = 55 mV (aprox.). Se este RVDT for usado em um sistema de tal forma que, à medida que a antena se move de 0o a 90o, ele fornece uma saída de 0 a 5 V, então cada mudança de grau na posição da antena é detectada como uma mudança de ± 55 mV na saída de tensão. O sistema de controle detecta essa tensão e gera sinais para acionar os motores. Os motores e o mecanismo de engrenagem correspondente também são projetados para girar a antena na faixa de 0o a 90o (ou 180o ou até mais) em incrementos de 1o em ambas as dimensões. Geralmente, a faixa do ângulo de elevação é de 0o a 90o, e a faixa do ângulo de azimute pode ser de 0o a 180o ou até mesmo 360o.
É assim que o sistema real é projetado e funciona. Mas aqui discuti a demonstração de tal sistema.
Modelo de demonstração: –
A figura mostra a disposição do sistema. Existem dois motores. Ambos os motores são motorredutores DC de 12 V com velocidade de 10 RPM. O motor que gira o prato no plano horizontal é conhecido como motor de azimute, e outro motor o gira no plano vertical que é o motor de elevação. Dois sensores opto-interruptores são usados para fornecer feedback da posição angular do motor. Ele usa uma roda de codificação que é fixada no eixo de cada motor. A roda de codificação possui furos (ranhuras) em 10o, 20o, 30o, da mesma forma. A disposição é feita de forma que à medida que o motor gira, a roda também gira; seus orifícios passam pela abertura do sensor e geram um pulso. Isso significa que o sensor gera um pulso a cada 10o de rotação do motor. A própria figura descreve como todo o arranjo é feito, mas deixe-me discuti-lo passo a passo.
• Todo o sistema é montado sobre uma caixa de madeira que abriga o circuito e serve de base ou plataforma para todo o mecanismo.
• O 1º motor DC (motor azimutal) é fixado dentro de uma caixa de madeira por meio de parafusos e cavilhas. A roda de codificação (roda azimutal) é fixada com seu eixo conforme mostrado
• O sensor 1 MOC7811 (sensor de azimute) também é montado verticalmente usando um pequeno suporte de madeira na mesma plataforma de madeira de forma que os furos da roda de codificação de azimute passem pela abertura do sensor
• Uma tira de metal em formato AU com cerca de 2 polegadas de largura é soldada diretamente ao eixo do motor DC. um lado do formato de U é bastante longo para os outros, como mostrado.
• Esta tira é usada para montar o 2º motor DC e outro sensor. O 2º motor CC (motor de elevação) é montado na tira em U usando braçadeira de montagem e parafusos no lado mais curto, enquanto o sensor 2 (sensor de elevação) é fixado na extremidade do braço longo (lateral)
 • Um prato (feito de papelão e papel alumínio) é fixado diretamente no eixo deste motor 2. A 2ª roda de codificação (roda de elevação) também é fixada na extremidade do eixo do motor 2 conforme mostrado
• Esta roda e sensor de elevação são novamente fixados de forma que os furos da roda passem pela abertura do sensor
Aqui está o snap do modelo.
• Um prato (feito de papelão e papel alumínio) é fixado diretamente no eixo deste motor 2. A 2ª roda de codificação (roda de elevação) também é fixada na extremidade do eixo do motor 2 conforme mostrado
• Esta roda e sensor de elevação são novamente fixados de forma que os furos da roda passem pela abertura do sensor
Aqui está o snap do modelo.
 Funcionamento do modelo de demonstração: –
• Inicialmente, o ângulo de ambos os motores é ajustado em 0o na roda de codificação. Significa que a antena parabólica tem ângulo de azimute de 0o e ângulo de elevação de 0o
• O ângulo de azimute pode ser definido de 0o a 350o em incrementos de 10o. O usuário pode definir o ângulo desejado usando botões
• Em seguida, o usuário deve definir um ângulo de elevação. Pode ser ajustado de 0o a 70o no passo de 10o usando botões
• Quando ambos os ângulos são definidos, o usuário pressiona outro botão para girar o prato
• À medida que o botão é pressionado, o motor de azimute começa a girar para definir o ângulo de azimute. À medida que o motor gira, a roda de codificação também gira e seus orifícios passam pela abertura do sensor. O sensor gera pulsos que fornecem feedback sobre a posição angular do motor. O motor gira até que o ângulo definido e o ângulo de rotação real do motor se tornem iguais. Se o ângulo definido for maior que o ângulo real do motor, o motor gira no sentido horário e se o ângulo definido for menor, o motor gira no sentido anti-horário
• O próximo motor de elevação começa a girar. Ele gira o prato e também a segunda roda de codificação. Novamente o motor gira até que o ângulo definido e o ângulo de rotação real do motor se tornem iguais. Ele também gira CW ou CCW conforme o ângulo definido é maior ou menor que o ângulo real
• Assim, a antena parabólica atinge a posição angular desejada nos planos de azimute e elevação
Hardware
Conforme mostrado na figura, o circuito é construído utilizando sensores MOC7811, chip driver de motor L293D, LCD 20×4 e microcontrolador ATMega16.
• Os circuitos dos sensores são construídos em torno do MOC7811. Ambos os circuitos do sensor são idênticos. O LED IR interno recebe alimentação de 5 V através de um resistor limitador de corrente de 33,0E, e o fototransistor é conectado em configuração de chave usando um resistor externo de 1K. A saída final do circuito do sensor é através do coletor do fototransistor
• Ambas as saídas dos sensores estão conectadas aos pinos de interrupção externa PD2 e PD3 do ATMega16.
• Os pinos PA0 a PA4 do PORTA são conectados ao terra através de rede de resistores (5 resistores de 1K). Cinco botões são conectados a esses pinos de forma que, quando o botão é pressionado, a lógica 1 é dada como entrada. O resto dos pinos do PORTA estão conectados com Vcc
• PORTC aciona os pinos de dados D0 – D7 do LCD. Dois pinos de controle Rs e En ou LCD são conectados aos pinos PORTB PB4 e PB5, respectivamente. O pino RW do LCD está conectado ao terra para permitir a gravação
• Pinos PORTB PB0 – PB3 acionam 2 motores DC através do chip L293D. Esses pinos são conectados à entrada do L293D, e dois motores são conectados às saídas do L293D
• Um cristal de 16 MHz é conectado aos pinos de entrada do cristal do ATMega16. Dois capacitores de 22pf são conectados para polarização e estabilidade do cristal
• Botão de reinicialização conectado conforme mostrado com o pino de entrada de reinicialização para fornecer uma reinicialização manual ao microcontrolador
Operação: –
• Inicialmente o LCD mostra o ângulo AZ definido e o ângulo EL definido como 0o. Ele também mostra o ângulo AZ e o ângulo EL atuais como 0o.
• O usuário deve definir o ângulo AZ e o ângulo EL pressionando os botões de aumento/diminuição do ângulo AZ e os botões de aumento/diminuição do ângulo EL
• Sempre que um botão é pressionado, o ângulo é alterado em 10o
• Depois de definir os ângulos de rotação, o botão do prato é pressionado. Ambos os motores giram um por um até que os ângulos da antena parabólica correspondam ao ângulo de azimute e ângulo de elevação definidos
Programas
• O software é escrito em linguagem C
• Compilado usando AVR Studio 4
• Testado usando AVR simulatro1 para dispositivo ATmega16 (disponível com AVR Studio 4)
Funcionamento do modelo de demonstração: –
• Inicialmente, o ângulo de ambos os motores é ajustado em 0o na roda de codificação. Significa que a antena parabólica tem ângulo de azimute de 0o e ângulo de elevação de 0o
• O ângulo de azimute pode ser definido de 0o a 350o em incrementos de 10o. O usuário pode definir o ângulo desejado usando botões
• Em seguida, o usuário deve definir um ângulo de elevação. Pode ser ajustado de 0o a 70o no passo de 10o usando botões
• Quando ambos os ângulos são definidos, o usuário pressiona outro botão para girar o prato
• À medida que o botão é pressionado, o motor de azimute começa a girar para definir o ângulo de azimute. À medida que o motor gira, a roda de codificação também gira e seus orifícios passam pela abertura do sensor. O sensor gera pulsos que fornecem feedback sobre a posição angular do motor. O motor gira até que o ângulo definido e o ângulo de rotação real do motor se tornem iguais. Se o ângulo definido for maior que o ângulo real do motor, o motor gira no sentido horário e se o ângulo definido for menor, o motor gira no sentido anti-horário
• O próximo motor de elevação começa a girar. Ele gira o prato e também a segunda roda de codificação. Novamente o motor gira até que o ângulo definido e o ângulo de rotação real do motor se tornem iguais. Ele também gira CW ou CCW conforme o ângulo definido é maior ou menor que o ângulo real
• Assim, a antena parabólica atinge a posição angular desejada nos planos de azimute e elevação
Hardware
Conforme mostrado na figura, o circuito é construído utilizando sensores MOC7811, chip driver de motor L293D, LCD 20×4 e microcontrolador ATMega16.
• Os circuitos dos sensores são construídos em torno do MOC7811. Ambos os circuitos do sensor são idênticos. O LED IR interno recebe alimentação de 5 V através de um resistor limitador de corrente de 33,0E, e o fototransistor é conectado em configuração de chave usando um resistor externo de 1K. A saída final do circuito do sensor é através do coletor do fototransistor
• Ambas as saídas dos sensores estão conectadas aos pinos de interrupção externa PD2 e PD3 do ATMega16.
• Os pinos PA0 a PA4 do PORTA são conectados ao terra através de rede de resistores (5 resistores de 1K). Cinco botões são conectados a esses pinos de forma que, quando o botão é pressionado, a lógica 1 é dada como entrada. O resto dos pinos do PORTA estão conectados com Vcc
• PORTC aciona os pinos de dados D0 – D7 do LCD. Dois pinos de controle Rs e En ou LCD são conectados aos pinos PORTB PB4 e PB5, respectivamente. O pino RW do LCD está conectado ao terra para permitir a gravação
• Pinos PORTB PB0 – PB3 acionam 2 motores DC através do chip L293D. Esses pinos são conectados à entrada do L293D, e dois motores são conectados às saídas do L293D
• Um cristal de 16 MHz é conectado aos pinos de entrada do cristal do ATMega16. Dois capacitores de 22pf são conectados para polarização e estabilidade do cristal
• Botão de reinicialização conectado conforme mostrado com o pino de entrada de reinicialização para fornecer uma reinicialização manual ao microcontrolador
Operação: –
• Inicialmente o LCD mostra o ângulo AZ definido e o ângulo EL definido como 0o. Ele também mostra o ângulo AZ e o ângulo EL atuais como 0o.
• O usuário deve definir o ângulo AZ e o ângulo EL pressionando os botões de aumento/diminuição do ângulo AZ e os botões de aumento/diminuição do ângulo EL
• Sempre que um botão é pressionado, o ângulo é alterado em 10o
• Depois de definir os ângulos de rotação, o botão do prato é pressionado. Ambos os motores giram um por um até que os ângulos da antena parabólica correspondam ao ângulo de azimute e ângulo de elevação definidos
Programas
• O software é escrito em linguagem C
• Compilado usando AVR Studio 4
• Testado usando AVR simulatro1 para dispositivo ATmega16 (disponível com AVR Studio 4)
Código-fonte do projeto
###
//Program to Here is the complete program with necessary comments. #include#include #include #include unsigned int set_az_angle=0, set_el_angle=0,dish_az_angle=0,dish_el_angle=0, rotate_reverse_flag=0,up_down_flag=0; ///////////////// function to send data to be displayed on LCD ///////////////////// void lcd_senddata(unsigned char data) { _delay_ms(2); PORTB=(1< // get the length of string for(i=0;i // write every char one by one s++; } } ////////////// function to initialize LCD ////////////////////////////////////////// void lcd_init { lcd_sendcmd(0x3E); // 8 bits per char lcd_sendcmd(0x0E); // screen on and cursor ON lcd_sendcmd(0x01); // clear LCD memory and home cursor lcd_sendcmd(0x84); // go to column 4 of line 1 lcd_printstr("Dish antenna"); // display message lcd_sendcmd(0xC4); // go to column 4 of line 2 lcd_printstr("angle control"); } ////////////////// function to display angle value on LCD /////////////////////////// void display_value(unsigned int angle) { unsigned int t1,a; unsigned char asci(3); unsigned int t; t = angle; if(t>=100) { a=2; while(t>=10) { t1=t%10; asci(a)=t1+0x30; t=t/10; a--; } asci(0)=t+0x30; } else { t1=t%10; asci(2)=t1+0x30; t=t/10; asci(1)=t+0x30; asci(0)=0x20; } lcd_senddata(asci(0)); lcd_senddata(asci(1)); lcd_senddata(asci(2)); lcd_senddata(0xDF); } /////////////////////// function to increment azimuth angle value //////////////////// void inc_az_angle { if(set_az_angle<360) set_az_angle+=10; // increment set angle by 10o till its not 360o lcd_sendcmd(0x8D); display_value(set_az_angle); } /////////////////////// function to decrement azimuth angle value //////////////////// void dec_az_angle { if(set_az_angle>0) set_az_angle-=10; // decrement set angle by 10o till its not 0o lcd_sendcmd(0x8D); display_value(set_az_angle); // display it on LCD } /////////////////////// function to increment elevation angle value ////////////////// void inc_el_angle { if(set_el_angle<70) set_el_angle+=10; lcd_sendcmd(0xCD); display_value(set_el_angle); } /////////////////////// function to decrement elevation angle value ////////////////// void dec_el_angle { if(set_el_angle>0) set_el_angle-=10; lcd_sendcmd(0xCD); display_value(set_el_angle); } //////////////// function to rotate dish ///////////////////////////////////// void rotate_dish { if(set_az_angle>dish_az_angle) // new set az angle is larger rotate_reverse_flag=0; // rotate dish CW else // otherwise rotate_reverse_flag=1; // rotate dish CCW if(set_el_angle>dish_el_angle) // if new set el angle is larger up_down_flag=0; // move dish up else // otherwise up_down_flag=1; // move dish down if(rotate_reverse_flag==0) { //////// rotate CW dish till set az angle and dish az angle are not same while(set_az_angle!=dish_az_angle) PORTB = 0x01; PORTB = 0x00; // stop when same } else { // rotate CCW dish till set az angle and dish az angle are not same while(set_az_angle!=dish_az_angle) PORTB = 0x02; PORTB = 0x00; // stop when same } if(up_down_flag==0) { // move dish up till set el angle and dish el angle are not same while(set_el_angle!=dish_el_angle) PORTB = 0x04; PORTB = 0x00; // stop when same } else { // move dish down till sent el angle and dish el angle are not same while(set_el_angle!=dish_el_angle) PORTB = 0x08; PORTB = 0x00; // stop when same } } int main(void) { DDRC=0xFF; // initializes ports as DDRD=0xC3; // input or output DDRB=0xFF; DDRA=0x00; PORTC=0x00; PORTB=0x00; MCUCR = (1< GICR=(1< // enable external interrupts sei ; // enable global interrupts lcd_init ; // initialize LCD _delay_ms(2000); // wait for 2 sec lcd_sendcmd(0x01); // clear LCD lcd_printstr("Set AZ angle:"); // display angle values display_value(set_az_angle); lcd_sendcmd(0xC0); lcd_printstr("Set EL angle:"); display_value(set_el_angle); lcd_sendcmd(0x94); lcd_printstr("Dish EL angle:"); display_value(set_el_angle); lcd_sendcmd(0xD4); lcd_printstr("Dish EL angle:"); display_value(set_el_angle); loop:while(PINA==0xE0); // loop until no switch is pressed switch(PINA) { case 0xE1: // when switch 1 is pressed inc_az_angle ; // increment az angle _delay_ms(200); // delay for key debounce break; case 0xE2: // same as above dec_az_angle ; _delay_ms(200); break; case 0xE4: inc_el_angle ; _delay_ms(200); break; case 0xE8: dec_el_angle ; _delay_ms(200); break; case 0xF0: rotate_dish ; break; } goto loop; } ///////////////// external interrupt 0 service routine ////////////////////////////// ISR(INT0_vect) { if(rotate_reverse_flag==1) // if dish is rotating reverse { if(dish_az_angle>0) dish_az_angle-=10; // decrement angle value by 10 } else // otherwise { if(dish_az_angle<360) dish_az_angle+=10; // increment angle value by 10 } lcd_sendcmd(0xA2); display_value(dish_az_angle); // display angle value on LCD } ///////////////// external interrupt 1 service routine ////////////////////////////// ISR(INT1_vect) { if(up_down_flag==1) // if dish is moving down { if(dish_el_angle>0) dish_el_angle-=10; // decrement angle value by 10 } else // otherwise { if(dish_el_angle<70) dish_el_angle+=10; // increment it by 10 } lcd_sendcmd(0xE2); display_value(dish_el_angle); // display it on LCD } ###
Diagramas de circuito
| circuito principal | 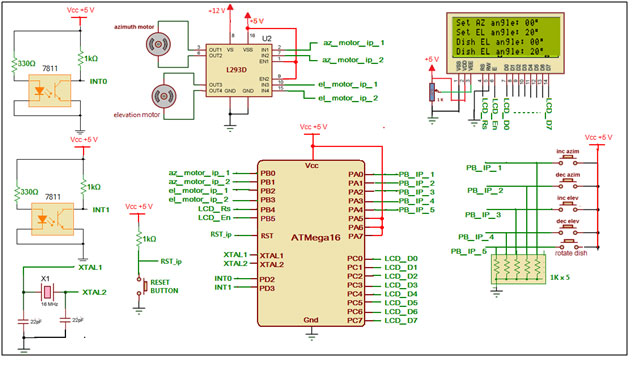 |