Quase metade do consumo mundial de energia é atribuído a motores eléctricos, pelo que melhorar a sua eficiência é considerado a medida mais eficaz na abordagem das questões energéticas globais.
Tipos de motores
Geralmente, os motores convertem a força gerada pelo fluxo de corrente num campo magnético em movimento rotacional, mas em termos gerais, isto também inclui o movimento linear.
Com base no tipo de fonte de alimentação que aciona o motor, eles podem ser classificados em motores CC e CA.
Além disso, de acordo com o princípio de rotação do motor, eles podem ser divididos aproximadamente nas seguintes categorias, excluindo motores especiais.
1. Motores DC (corrente contínua)
(1) Motores escovados
Os motores escovados amplamente utilizados são geralmente chamados de motores DC. Eles giram entrando em contato sequencialmente com os eletrodos chamados “escovas” (no lado do estator) e o “comutador” (no lado da armadura) para comutar a corrente.
(2) Motores DC sem escova
Os motores DC sem escovas não requerem escovas e comutadores. Eles usam funções de comutação, como transistores, para comutar a corrente e obter movimento rotacional.
(3) Motores de passo
Este motor opera em sincronização com a potência de pulso e, portanto, também é conhecido como motor de pulso. Sua característica é a capacidade de obter facilmente uma operação de posicionamento precisa.
2. Motores CA (corrente alternada)
(1) Motores Assíncronos
A corrente CA gera um campo magnético rotativo no estator, fazendo com que o rotor induza corrente e gire sob sua interação.
(2) Motores Síncronos
A corrente CA cria um campo magnético rotativo e o rotor com pólos magnéticos gira devido à atração. A velocidade de rotação é sincronizada com a frequência de potência.
| Motor de passo | Motor de corrente contínua escovado | Motor de corrente contínua sem escova |
 |
 |
 |
Corrente, campos magnéticos e força
Em primeiro lugar, para facilitar as explicações subsequentes sobre os princípios motores, vamos revisitar as leis/regras básicas relativas à corrente, aos campos magnéticos e à força.
Embora possa evocar uma sensação de nostalgia, este conhecimento pode ser facilmente esquecido se os componentes magnéticos não forem usados regularmente.
Ilustraremos isso usando imagens e equações.
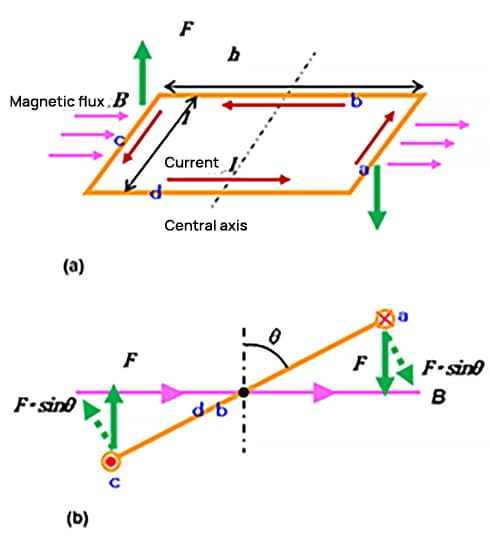
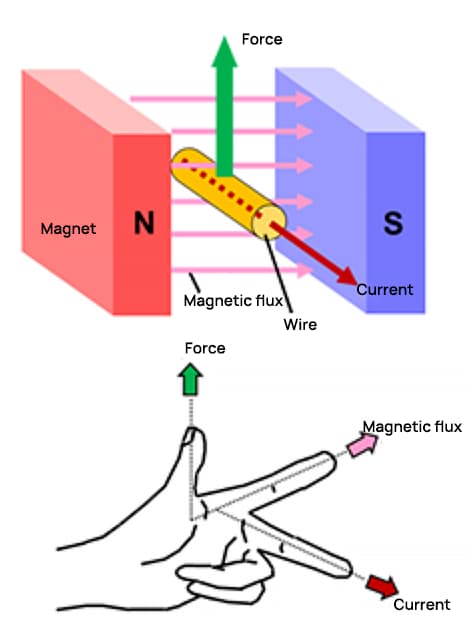
Quando a armação de arame for retangular, a força que atua sobre a corrente deve ser considerada. A força F exercida nas partes a e c da estrutura é:

O torque é gerado em torno do eixo central. Por exemplo, ao considerar um estado onde o ângulo de rotação é apenas θ, a força que atua perpendicularmente a b e d é senθ. Consequentemente, o torque Ta na parte a é representado pela seguinte fórmula:

Considerando a parte C da mesma forma, o torque é duplicado, gerando um torque calculado pela seguinte fórmula:

Dado que a área de um retângulo é S = h*l, o seguinte resultado pode ser derivado substituindo-o na fórmula mencionada anteriormente:

Esta fórmula não se aplica apenas a retângulos, mas também a outras formas comuns, como círculos. Este princípio está subjacente ao funcionamento dos motores elétricos.
Como um motor gira?
1) Os motores giram utilizando ímãs e força magnética.
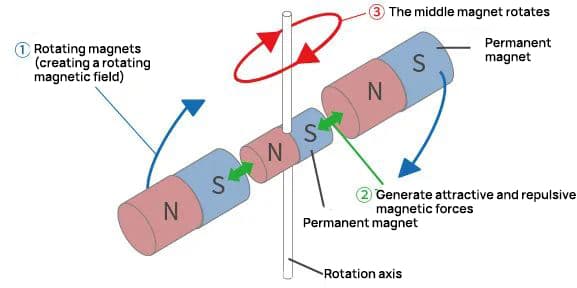
Em torno de um ímã permanente com eixo giratório:
① Gire o ímã (para gerar um campo magnético rotativo).
② Isto segue o princípio de que pólos opostos (N e S) se atraem, enquanto pólos iguais se repelem.
③ O ímã com o eixo giratório irá então girar.
Este é o princípio básico da rotação do motor.
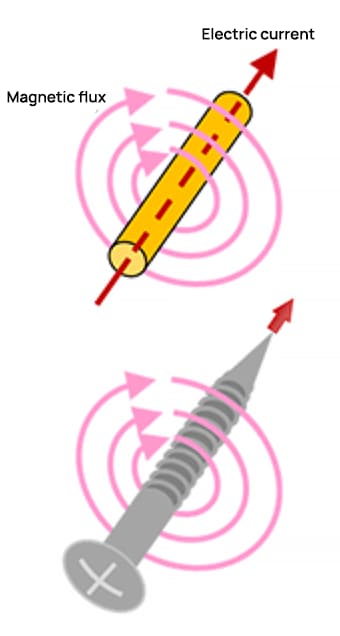
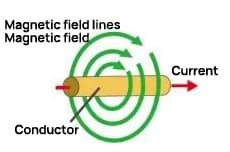
A corrente que flui através do condutor gera um campo magnético giratório ao seu redor, fazendo com que o ímã gire, o que representa essencialmente o mesmo estado de movimento.
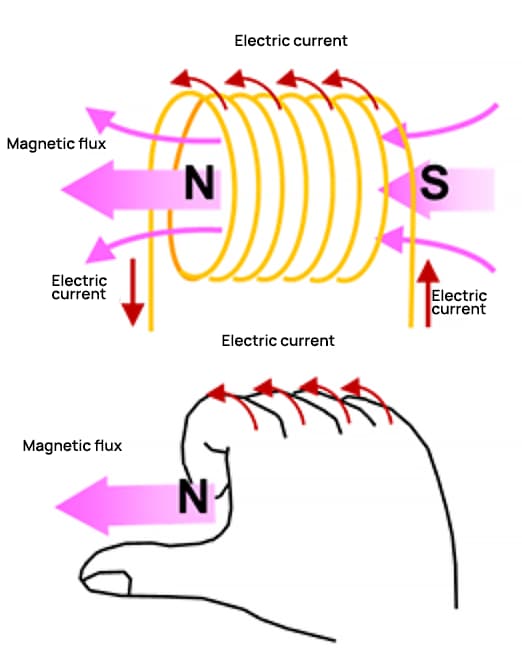
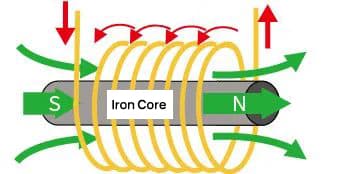
Além disso, quando um condutor é enrolado em uma bobina, as forças magnéticas são sintetizadas para formar um grande fluxo magnético, criando um pólo Norte e um pólo Sul.
Além disso, ao inserir um núcleo ferroso no condutor enrolado, as linhas do campo magnético podem passar mais facilmente, gerando assim uma força magnética mais forte.
2) Motores Rotativos Operacionais
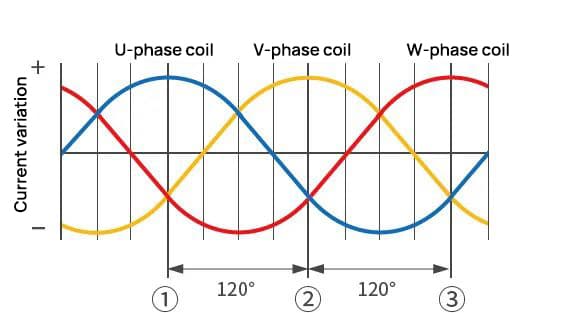
Neste contexto, apresentamos uma abordagem prática para motores rotativos, demonstrando o uso de corrente alternada trifásica e bobinas para gerar um campo magnético rotativo. (Corrente alternada trifásica refere-se a sinais alternados faseados em intervalos de 120°.)
O campo magnético sintetizado no referido Estado ① corresponde à Figura ① abaixo.
O campo magnético sintetizado no estado ② mencionado anteriormente alinha-se com a Figura ② mostrada abaixo.
O campo magnético sintetizado associado ao estado ③ acima mencionado é representado na Figura ③ abaixo.
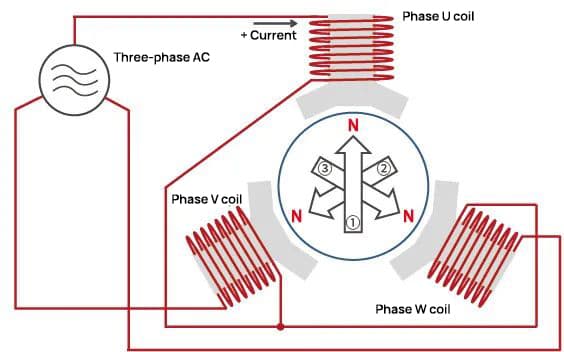
Como afirmado acima, a bobina enrolada em torno do núcleo de ferro é dividida em três fases: bobina da fase U, bobina da fase V e bobina da fase W, dispostas em intervalos de 120°. A bobina com tensão mais alta gera um pólo norte, enquanto aquela com tensão mais baixa gera um pólo sul.
Cada fase varia de acordo com a onda senoidal, portanto, a polaridade (polo norte ou sul) e o campo magnético (força magnética) gerado por cada bobina irão mudar.
Neste ponto, se considerarmos apenas a bobina que gera o pólo norte, a sequência de mudanças vai da bobina da fase U para a bobina da fase V, depois para a bobina da fase W e, finalmente, de volta para a bobina da fase U, produzindo assim um rotação.
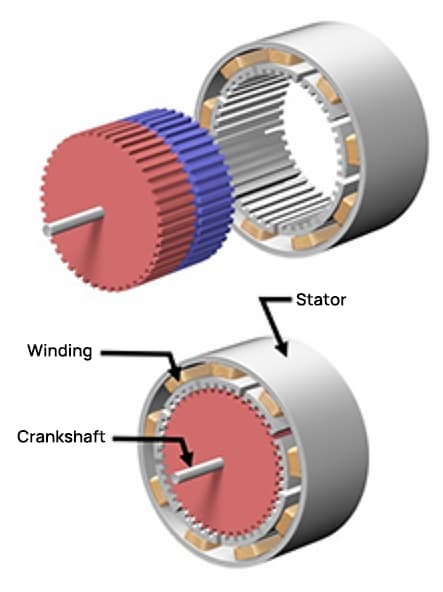
Estrutura de Pequenos Motores
A figura abaixo fornece uma construção geral e comparação de três tipos de motores: motores de passo, motores de corrente contínua com escovas (CC) e motores de corrente contínua (CC) sem escovas.
Os componentes básicos desses motores incluem principalmente bobinas, ímãs e rotores. Devido aos seus diversos tipos, eles são ainda classificados em tipos fixos em bobina e fixos em ímã.
| Motor de passo | Motor de corrente contínua escovado | Motor de corrente contínua sem escova |
 |
 |
 |
A seguir está uma descrição estrutural relacionada ao diagrama de exemplo. Por favor, entenda que este documento apresenta a estrutura dentro de uma estrutura ampla, pois pode haver outras estruturas se divididas com mais detalhes.
As bobinas do motor de passo aqui são fixadas por fora, com os ímãs girando por dentro; os ímãs do motor CC escovado são fixados na parte externa, com as bobinas girando na parte interna.
O fornecimento de energia às bobinas e a mudança na direção da corrente são feitos por escovas e comutadores; nos motores sem escova, as bobinas são fixadas na parte externa, com os ímãs girando na parte interna.
Devido às variações nos tipos de motores, mesmo com os mesmos componentes básicos, suas estruturas podem diferir. Detalhes específicos serão explicados em cada seção.
Motor escovado
Estrutura do Motor Escovado
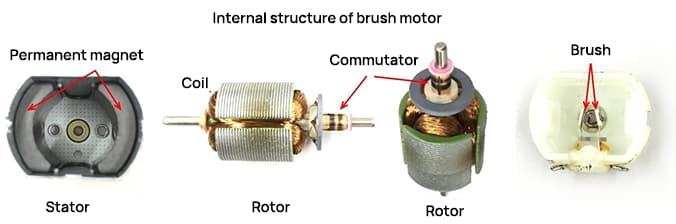
A imagem abaixo mostra o exterior de um motor DC escovado comumente usado em modelos, bem como uma vista explodida de um motor típico de dois pólos (dois ímãs) e três slots (três bobinas). Muitos podem ter experiência em desmontar motores e remover ímãs.
Em um motor DC escovado, os ímãs permanentes ficam estacionários enquanto as bobinas podem girar em torno do centro interno. O lado estacionário é conhecido como “estator” e o lado giratório é conhecido como “rotor”.
Aqui está um diagrama esquemático que ilustra conceitos estruturais.
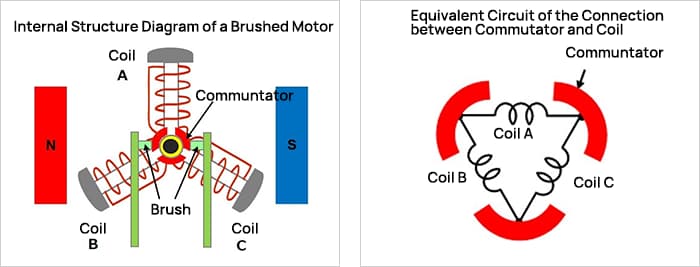
O eixo central de rotação é circundado por três comutadores – placas metálicas curvas utilizadas para comutação de corrente elétrica. Para evitar o contato entre si, os comutadores são dispostos separados por 120° (360° ÷ 3 unidades). Esses comutadores giram com o eixo.
Cada comutador é conectado a uma extremidade de uma bobina e a outra e, juntos, os três comutadores e as três bobinas formam uma rede de circuito completa (anel).
Duas escovas são fixadas em 0° e 180° para fazer contato com os comutadores. Uma fonte de alimentação CC externa é conectada às escovas e a corrente flui ao longo do caminho da escova ao comutador, do comutador à bobina e da bobina de volta à escova.
Este é o princípio de rotação de um motor com escovas.
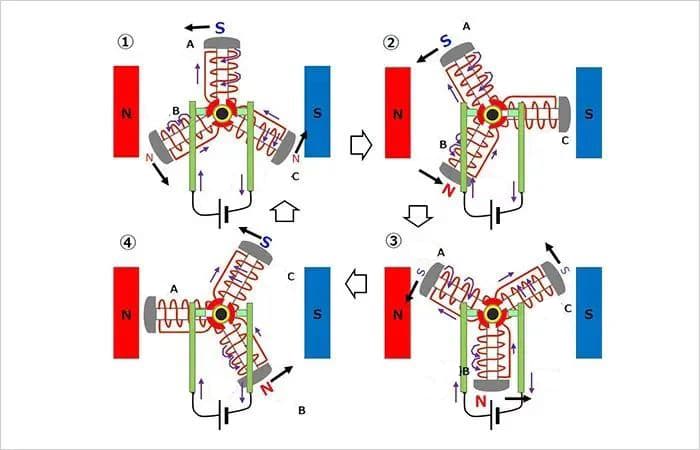
① Rotação no sentido anti-horário a partir do estado inicial
A bobina A fica na parte superior, com a fonte de alimentação conectada às escovas, designando o lado esquerdo como (+) e o direito como (-). Uma alta corrente flui da escova esquerda através do comutador para a bobina A. Isso transforma a parte superior (externa) da bobina A em um pólo sul (S).
Como metade da corrente da bobina A flui da escova esquerda para as bobinas B e C na direção oposta à bobina A, os lados externos das bobinas B e C tornam-se pólos norte fracos (N), indicados por letras menores no diagrama.
Os campos magnéticos gerados nessas bobinas, juntamente com a repulsão e atração dos ímãs, fornecem uma força que gira as bobinas no sentido anti-horário.
② Rotação adicional no sentido anti-horário
Em seguida, supondo que a bobina A tenha girado 30° no sentido anti-horário, a escova direita entra em contato com os dois comutadores.
A corrente na bobina A continua a fluir da escova esquerda através da escova direita, e o lado externo da bobina permanece um pólo sul. A mesma corrente flui através da bobina B, transformando seu lado externo em um pólo norte mais forte. A bobina C está em curto-circuito pelas escovas em ambas as extremidades, de modo que não há fluxo de corrente e nenhum campo magnético é gerado.
Mesmo neste estado, é aplicada uma força rotativa anti-horária. De ③ a ④, a bobina superior continua a ser movida para a esquerda e a bobina inferior continua a ser movida para a direita, resultando em rotação contínua no sentido anti-horário.
Cada rotação de 30° da bobina para os estados ③ e ④, quando a bobina está acima do eixo horizontal central, seu lado externo torna-se um pólo sul; quando está abaixo, torna-se um pólo norte e esse movimento se repete.
Em outras palavras, a bobina superior experimenta repetidamente uma força para a esquerda, e a bobina inferior, uma força para a direita (ambas no sentido anti-horário). Isso mantém o rotor girando no sentido anti-horário.
Se a fonte de alimentação estiver conectada à escova esquerda oposta (-) e à escova direita (+), um campo magnético reverso é gerado na bobina, invertendo assim o sentido da força aplicada na bobina, fazendo-a girar no sentido horário.
Além disso, quando a fonte de alimentação é desligada, o rotor do motor escovado para de girar devido à ausência do campo magnético que impulsionava sua rotação.
Motor trifásico sem escova de onda completa
Aparência e estrutura do motor trifásico sem escova de onda completa
A imagem abaixo mostra um exemplo da aparência e estrutura do motor brushless.
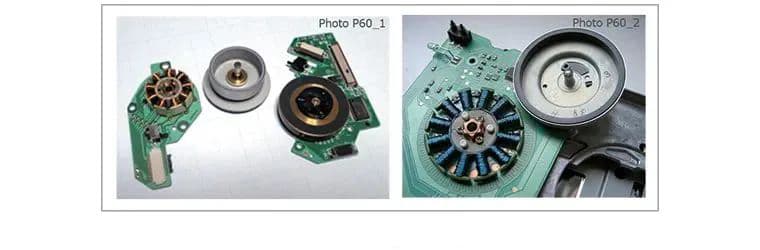
O lado esquerdo mostra um exemplo do motor do eixo principal usado para girar o disco no dispositivo de reprodução de disco, contendo um total de nove bobinas, três fases vezes três.
À direita está um exemplo de motor de fuso principal de um dispositivo FDD, com doze bobinas (três fases vezes quatro). As bobinas são montadas em uma placa de circuito e enroladas em um núcleo de ferro.
No lado direito da bobina, o componente em forma de disco é um rotor de ímã permanente. O perímetro é um ímã permanente, o eixo do rotor é inserido no centro da bobina e cobre parte da bobina, com o ímã permanente circundando a periferia da bobina.
Diagrama da estrutura interna e circuito equivalente do motor trifásico sem escova de onda completa
A seguir estão o diagrama simplificado da estrutura interna e o diagrama do circuito equivalente das conexões da bobina para um motor trifásico sem escovas de onda completa.
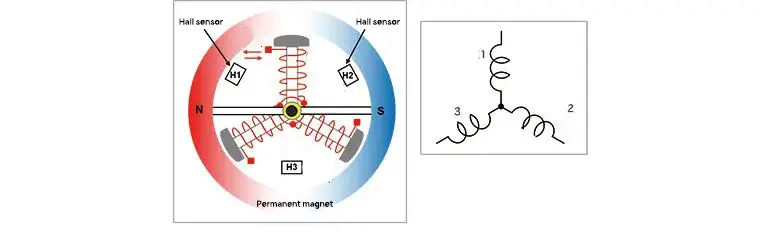
Este esquema representa uma estrutura simples de um motor de 2 pólos (2 ímãs) e 3 slots (3 bobinas). Assemelha-se à estrutura de um motor escovado com igual número de pólos e ranhuras, exceto que o lado da bobina é estacionário e os ímãs são giratórios. Naturalmente, este design não incorpora pincéis.
Nesta configuração, as bobinas são conectadas em formação em Y. Componentes semicondutores fornecem corrente às bobinas, controlando a entrada e saída de corrente com base na posição dos ímãs rotativos.
Neste exemplo, um elemento Hall é usado para detectar a posição dos ímãs. O elemento Hall é colocado entre as bobinas, onde detecta a tensão gerada pela intensidade do campo magnético e a utiliza para obter informações de posição.
Na imagem fornecida anteriormente do motor spindle FDD, também pode ser observado um elemento Hall (localizado acima das bobinas), que serve para detectar a posição entre as bobinas.
O elemento Hall é um sensor magnético bem conhecido. Ele pode converter a magnitude de um campo magnético em tensão, representando a direção do campo com valores positivos ou negativos. Abaixo está um diagrama que ilustra o efeito Hall.
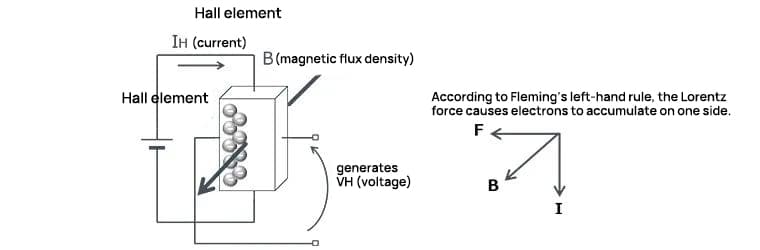
O elemento Hall utiliza o fenômeno de que “quando a corrente IH flui através do semicondutor e o fluxo magnético B passa em ângulo reto com a corrente, uma tensão VH é gerada na direção perpendicular à corrente e ao campo magnético”.
Este fenômeno, conhecido como “Efeito Hall”, foi descoberto pelo físico americano Edwin Herbert Hall. A tensão VH gerada é representada pela seguinte fórmula.
VH=(KH/d)・EuH・B
Onde KH é o coeficiente de Hall e d é a espessura da superfície de penetração do fluxo.
Como sugere a fórmula, quanto maior a corrente, maior será a tensão. Esta característica é frequentemente usada para detectar a posição do rotor (ímã).
Princípio de rotação do motor trifásico sem escova de onda completa
O princípio de rotação do motor sem escova será explicado nas etapas ① a ⑥. Para facilitar a compreensão, o ímã permanente foi simplificado de um círculo para um retângulo.
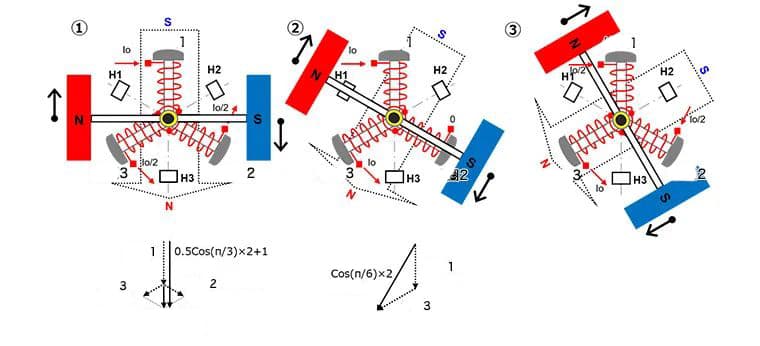
1) Em um sistema de bobina trifásica, imagine a bobina 1 fixada na posição de 12 horas de um relógio, a bobina 2 às 4 horas e a bobina 3 às 8 horas. Suponha um ímã permanente de 2 pólos com o pólo Norte à esquerda e o pólo Sul à direita, capaz de rotação.
A corrente Io é introduzida na bobina 1, gerando um campo magnético do pólo Sul na parte externa da bobina. Metade desta corrente, Io/2, flui para fora das bobinas 2 e 3, criando um campo magnético do pólo Norte no seu exterior.
Quando os campos magnéticos das bobinas 2 e 3 passam por síntese vetorial, é gerado um campo magnético do pólo Norte descendente. Este campo tem metade do tamanho do campo magnético produzido quando a corrente Io passa através de uma bobina e, quando adicionado ao campo da bobina 1, torna-se 1,5 vezes maior. Isso cria um campo magnético sintetizado em um ângulo de 90° em relação ao ímã permanente, gerando assim o torque máximo e solicitando a rotação do ímã permanente no sentido horário.
À medida que a corrente na bobina 2 diminui e a da bobina 3 aumenta com base na posição de rotação, o campo magnético sintetizado também gira no sentido horário, continuando a rotação do ímã permanente.
2) Com uma rotação de 30°, a corrente Io entra na bobina 1, definindo a corrente na bobina 2 como zero e fazendo a corrente Io fluir para fora da bobina 3.
O exterior da bobina 1 torna-se o pólo S, e o exterior da bobina 3 transforma-se no pólo N. Durante a combinação vetorial, o campo magnético gerado é √3 (aproximadamente 1,72) vezes o de uma única bobina transportando corrente Io. Isso também resulta em um campo magnético composto em um ângulo de 90° em relação ao campo do ímã permanente, girando no sentido horário.
Quando a corrente de entrada Io na bobina 1 é reduzida de acordo com a posição rotacional, a corrente de entrada na bobina 2 começa a aumentar de zero e a corrente de saída na bobina 3 aumenta para Io, o campo magnético composto também gira no sentido horário, e o permanente ímã continua girando.
Supondo que todas as correntes de fase sejam senoidais, a corrente aqui é Io×sin(π⁄3)=Io×√3⁄2. Através da combinação vetorial do campo magnético, o tamanho total do campo magnético é 1,5 vezes o campo produzido por uma única bobina ((√3⁄2)2×2=1,5). Quando todas as correntes de fase são senoidais, independentemente da posição do ímã permanente, o tamanho do campo magnético composto vetorial é sempre 1,5 vezes maior que o de uma única bobina, e o campo magnético forma um ângulo de 90° com o campo magnético do permanente. magnético.
3) Após rotação adicional de 30°, a corrente Io/2 flui para a bobina 1, a corrente Io/2 entra na bobina 2 e a corrente Io flui para fora da bobina 3.
O exterior da bobina 1 torna-se o pólo S, o exterior da bobina 2 também se transforma no pólo S e o exterior da bobina 3 torna-se o pólo N. Durante a combinação vetorial, o campo magnético gerado é 1,5 vezes o campo magnético produzido quando a corrente Io passa através de uma única bobina (o mesmo que em ①). Um campo magnético composto também é formado aqui em um ângulo de 90° em relação ao campo do ímã permanente, girando no sentido horário.
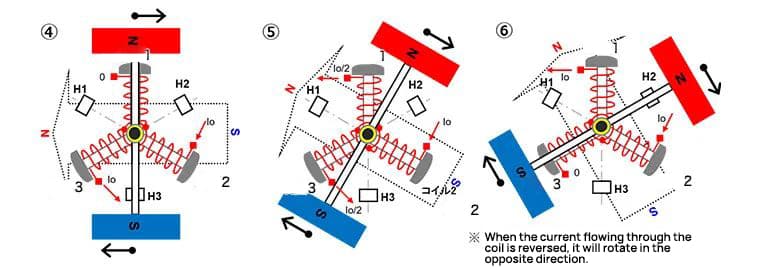
Nas etapas 4 a 6, gire da mesma maneira que nas etapas 1 a 3.
Desta forma, ao alternar sequencialmente a corrente que flui para a bobina de acordo com a posição do ímã permanente, o ímã permanente girará em uma direção fixa. Da mesma forma, se a corrente for invertida e a direção do campo magnético sintético for invertida, ele girará no sentido anti-horário.
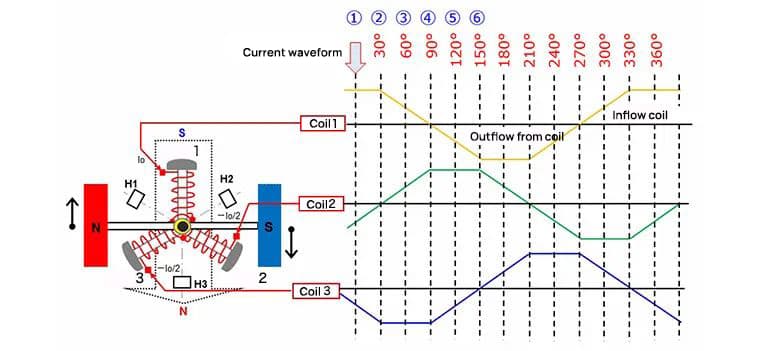
O diagrama abaixo exibe continuamente a corrente para cada bobina em cada uma das etapas 1 a 6 mencionadas acima. A partir da introdução acima, a relação entre as mudanças na corrente e na rotação deve ser compreendida.
Motor de passo
O motor de passo é um tipo de motor que pode sincronizar com precisão os sinais de pulso para controlar os ângulos de rotação e a velocidade. Também é conhecido como “motor de pulso”.
O motor de passo, que não requer sensor de posição e pode realizar posicionamento preciso por meio de controle de malha aberta, é amplamente utilizado em equipamentos que requerem localização precisa.
Estrutura de um motor de passo (bipolar bifásico)
As imagens abaixo, da esquerda para a direita, mostram um exemplo da aparência externa de um motor de passo, um diagrama simples de sua estrutura interna e um esquema conceitual de seu design.
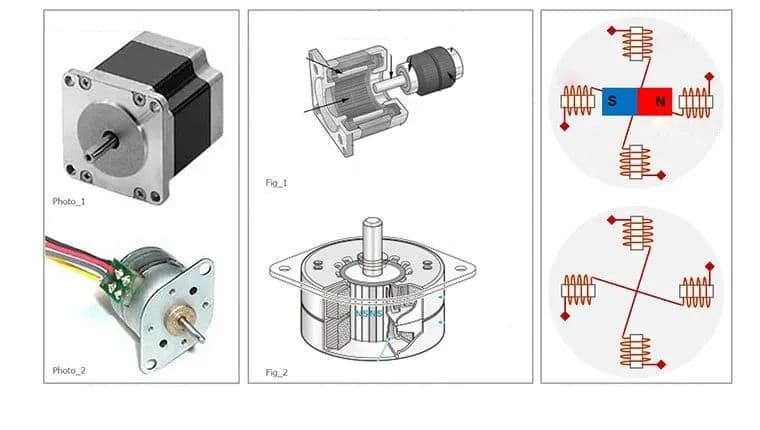
Os exemplos externos fornecidos são de motores de passo do tipo HB (Híbrido) e PM (Ímã Permanente). Os diagramas do meio também retratam as estruturas dos tipos HB e PM.
Os motores de passo são estruturados com bobinas fixas e um ímã giratório. O diagrama conceitual do lado direito da estrutura interna do motor de passo ilustra um exemplo de motor PM usando duas fases (dois conjuntos) de bobinas. Nos exemplos de estrutura básica dos motores de passo, as bobinas são posicionadas externamente e o ímã permanente está localizado internamente. Além do bifásico, também existem tipos com maior número de fases, como trifásico e cincofásico.
Alguns motores de passo possuem estruturas distintas, mas para explicar seus princípios de funcionamento, este artigo fornece a estrutura básica dos motores de passo. Através deste artigo pretende-se compreender que os motores de passo adotam principalmente uma estrutura com bobinas fixas e um ímã permanente giratório.
Princípio Básico de Funcionamento de Motores de Passo (Excitação Monofásica)
O diagrama a seguir é usado para explicar o princípio básico de funcionamento dos motores de passo. Este é um exemplo de excitação monofásica (um conjunto de bobinas) das bobinas bipolares bifásicas mencionadas acima. A premissa do diagrama é a mudança de estado de ① para ④. As bobinas consistem na Bobina 1 e na Bobina 2. Além disso, a seta da corrente representa a direção do fluxo da corrente.
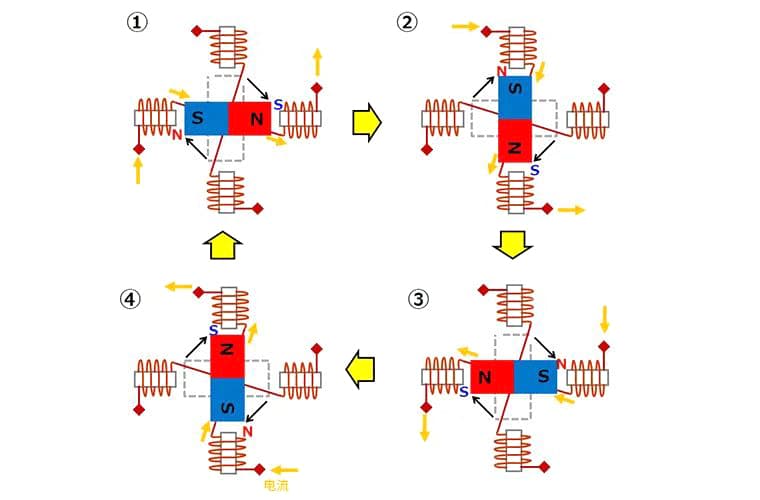
①Direcione a corrente para entrar pelo lado esquerdo da bobina 1 e sair pelo lado direito. Evite qualquer fluxo de corrente através da bobina 2. Como resultado, o lado interno da bobina esquerda 1 torna-se N (norte), enquanto o lado interno da bobina direita 1 torna-se S (sul). Consequentemente, o ímã permanente do meio é atraído pelo campo magnético da bobina 1, adotando um estado com S à esquerda e N à direita, e para.
②Em seguida, interrompa a corrente na bobina 1, direcionando-a para entrar pela parte superior da bobina 2 e sair pela parte inferior. O lado interno da bobina superior 2 torna-se então N, e o lado interno da bobina inferior 2 torna-se S. O ímã permanente é atraído por este campo magnético, girando 90 graus no sentido horário e parando.
③Depois disso, interrompa a corrente na bobina 2, direcionando-a para entrar pelo lado direito da bobina 1 e sair pelo lado esquerdo. O lado interno da bobina esquerda 1 torna-se S, e o lado interno da bobina direita 1 torna-se N. O ímã permanente é novamente atraído por este campo, girando mais 90 graus no sentido horário e parando.
④Finalmente, interrompa a corrente na bobina 1, direcionando-a para entrar pela parte inferior da bobina 2 e sair pela parte superior. O lado interno da bobina superior 2 torna-se S, enquanto o lado interno da bobina inferior 2 torna-se N. Mais uma vez, o ímã permanente é atraído por este campo magnético, girando 90 graus no sentido horário e parando.
Ao mudar o fluxo de corrente através das bobinas na sequência acima (① para ④) por meio de um circuito eletrônico, o motor de passo pode girar. Neste exemplo, cada ação do interruptor gira o motor de passo em 90 graus.
Além disso, manter um fluxo de corrente contínuo através de uma bobina específica permite que o motor permaneça no estado parado enquanto mantém o torque. Como observação lateral, inverter a ordem do fluxo de corrente através das bobinas pode fazer com que o motor de passo gire na direção oposta.







