Esta é a versão mais avançada de “Escolha e coloque o robô”talvez o mais popular e amplamente utilizado nas indústrias recentes. Uma pessoa de um local remoto pode controlar confortavelmente o movimento do braço robótico sem qualquer conexão de fio.
Novamente, existem dois sistemas, um no lado do transmissor, no qual um programa de software escrito em VC++ gera sinais de controle. Esses sinais são codificados e transmitidos pelo chip transmissor de RF. Na outra extremidade, o chip receptor RF irá demodular esses sinais e o decodificador irá decodificá-los. Finalmente, o 89C51 realizará a ação de controle desejada no braço robótico.
Este é um tipo de projeto semelhante ao robô pick n place, mas há duas mudanças principais
1) A estrutura mecânica é controlada sem fio a partir de um computador remoto
2) A estrutura mecânica de um braço robótico é, na verdade, um instrumento de trabalho em indústrias, não apenas em projetos simples
Aqui, um homem de um local remoto com alcance de cerca de 50-100 m, sentado em sua cadeira com seu computador, pode facilmente controlar o mecanismo pelo teclado ou mouse. Um transmissor ASK conectado ao computador transmite os códigos de controle. Esses códigos são recebidos pelo receptor ASK, decodificados e entregues ao 89C51 que então controla o movimento do braço robótico. Assim, de acordo com o comando do usuário através do computador, o movimento do braço robótico é controlado de um local remoto, sem qualquer conexão de fio.
Vamos primeiro começar com o mecanismo
Estrutura mecânica do braço robótico: –
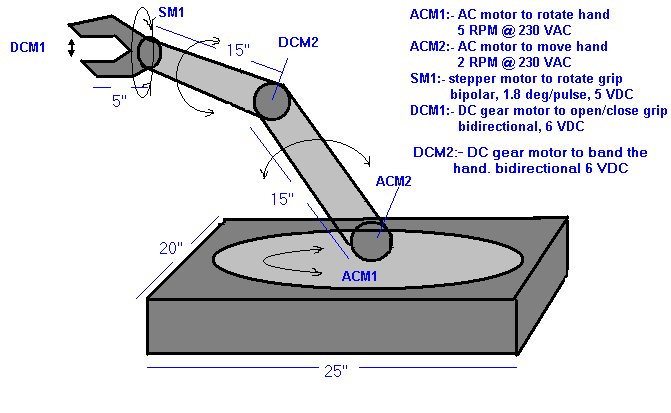
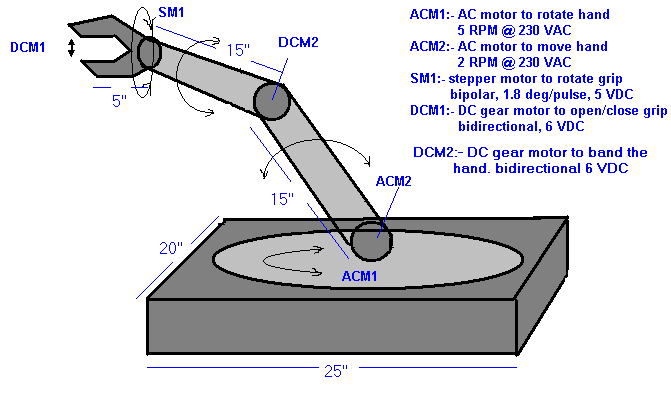
A figura abaixo mostra a estrutura externa completa do braço robótico. O corpo completo é feito de aço sólido. Todos os movimentos são perfeitamente calibrados e controlados. O tamanho completo com todas as dimensões são conforme indicado. Existem vários movimentos neste braço
- Movimento circular da mão: – o braço pode girar completamente em 360ó círculo com a ajuda de um motor CA bidirecional de ¼ HP, 0,2 A, 230 V (ACM1) que tem no máximo 5 RPM em 230 VCA nominal
- Movimento vertical da mão: –a mão pode se mover para baixo abaixo de 0ó até 30ó no máximo até 90ó. Esta moção está dividida em duas partes. Mão inferior e mão superior. O ponteiro inferior se move para cima e para baixo devido ao motor CA bidirecional de ¼ HP, 0,2 A, 230 V (ACM2) que tem no máximo 5 RPM em 230 VCA nominal. A vantagem é movida por um motoredutor de 6 V DC (DCM2)
- Movimento circular de aderência: – a empunhadura pode girar livremente em qualquer direção em 360 graus completosó círculo devido ao motor de passo bipolar de 5 VCC com 18ó resolução de etapas.
- Fechamento de abertura do punho: –a abertura máxima da pega é de 5 cm e a mínima é de 0,5 cm. o mesmo tipo de motorredutor de 6 VCC (DCM1) é utilizado para este movimento.
Portanto, para todos os movimentos, temos um motor no total de cinco motores. Todos os cinco motores fornecem flexibilidade total ao mecanismo para que ele possa escolher e posicionar um objeto com facilidade.
Agora começaremos com o controle deste mecanismo. Existem duas partes
1) Informatize o transmissor ASK: – este é um pequeno hardware conectado à porta LPT do computador que transmite os códigos de ação fornecidos por um programa de software preparado em VC++.
2) Receptor ASK baseado em 89C51: – consiste em receptor ASK, decodificador e microcontrolador 89C51. Ele controla todos os movimentos do braço robótico controlando todos os cinco motores dependendo do comando dado pelo usuário.
Transmissor ASK computadorizado
Informatize o transmissor ASK: –
Esta parte é dividida em duas partes (1) software e (2) hardware
Parte de software: – a figura abaixo mostra o design da aplicação.
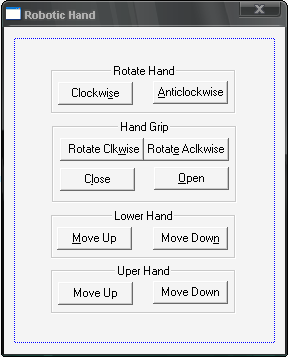
Possui 10 botões de comando para 10 movimentos diferentes. Aqui está a descrição de suas propriedades.
|
Sr. Não. |
item |
propriedade |
contexto |
função |
|
1 |
Botão1 |
EU IA rubrica |
IDC_CLK Sentido horário |
Gira a mão 30ó no sentido horário quando o botão é pressionado uma vez |
|
2 |
Botão2 |
EU IA rubrica |
IDC_ACLK &Anti-Horário |
Gira a mão 30ósentido anti-horário quando o botão é pressionado uma vez |
|
3 |
Botão3 |
EU IA rubrica |
IDC_CLKW Rode no sentido dos ponteiros do relógio |
Pressionar os botões uma vez girará a alça 75ósentido horário |
|
4 |
Botão4 |
EU IA rubrica |
IDC_ACLKW Girar no sentido anti-horário |
Pressionar os botões uma vez girará a alça 75ósentido anti-horário |
|
5 |
Botão5 |
EU IA rubrica |
IDC_CLS Fechar |
Abre o punho em 0,5 cm ao pressionar o botão uma vez |
|
6 |
Botão6 |
EU IA rubrica |
IDC_OPN &Abrir |
Fecha o punho em 0,5 cm ao pressionar o botão uma vez |
|
7 |
Botão7 |
EU IA rubrica |
IDC_UP1 &Subir |
Move a parte inferior da mão 30ó para cima quando o botão é pressionado uma vez |
|
8 |
Botão8 |
EU IA rubrica |
IDC_DWN1 Mover para baixo |
Move a parte inferior da mão 30ópara baixo quando o botão é pressionado uma vez |
|
9 |
Botão9 |
EU IA rubrica |
IDC_UP2 Subir |
Move a parte superior da mão 30ó para cima quando o botão é pressionado uma vez |
|
10 |
Botão10 |
EU IA rubrica |
IDC_DWN2 Mover para baixo |
Move a parte superior da mão 30ópara baixo quando o botão é pressionado uma vez |
Na verdade, cada botão envia um código específico para a porta LPT que será transmitido pelo transmissor ASK. Cada código é acionado em um movimento específico em mãos.
Uma das funções que enviam código para LPT está escrita abaixo
vazio CRoboticHandDlg::OnClk
{
// TODO: Adicione seu código do manipulador de notificação de controle aqui
_outp(0x0378, 0xE1); //habilita a transmissão e envia o código para LPT
Sono(200); // espera 0,2 segundo
_outp(0x0378,0x10); // desabilita a transmissão
}
Aqui estão os códigos que desencadeiam um movimento específico
01h* : girar o ponteiro no sentido horário
02h: girar o ponteiro no sentido anti-horário
03h: girar a manopla no sentido horário
04h: girar a manopla no sentido anti-horário
05h: mover a mão inferior para cima
06h: mover a mão inferior para baixo
07h: mover a mão superior para cima
08h: mover a mão superior para baixo
* “h” indica que todos os códigos estão em formato hexadecimal.
Agora vamos ver o pequeno hardware que irá transmitir esses códigos
Parte de hardware: –o diagrama de blocos desta parte é mostrado na figura.
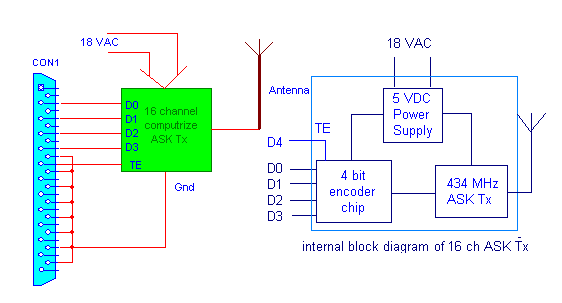
Conforme mostrado na figura, um transmissor ASK de 16 canais é conectado com um conector macho/fêmea tipo D de 25 pinos. Os pinos de dados D0-D3 do conector são conectados aos pinos de dados do chip codificador (HT12E). O pino D4 conectado ao pino de habilitação de transmissão (TE) do chip codificador. A saída do chip codificador é dada como entrada para o transmissor ASK de 434 MHz que irá modular os dados com sinal portador e transmiti-los através de uma antena adequada. Como são quatro bits podemos enviar no máximo 16 códigos diferentes através deste transmissor, por isso é um transmissor ASK de 16 canais.
Receptor ASK baseado em 89C51
Receptor ASK baseado em 89C51: –
A figura abaixo mostra o diagrama de circuito do receptor
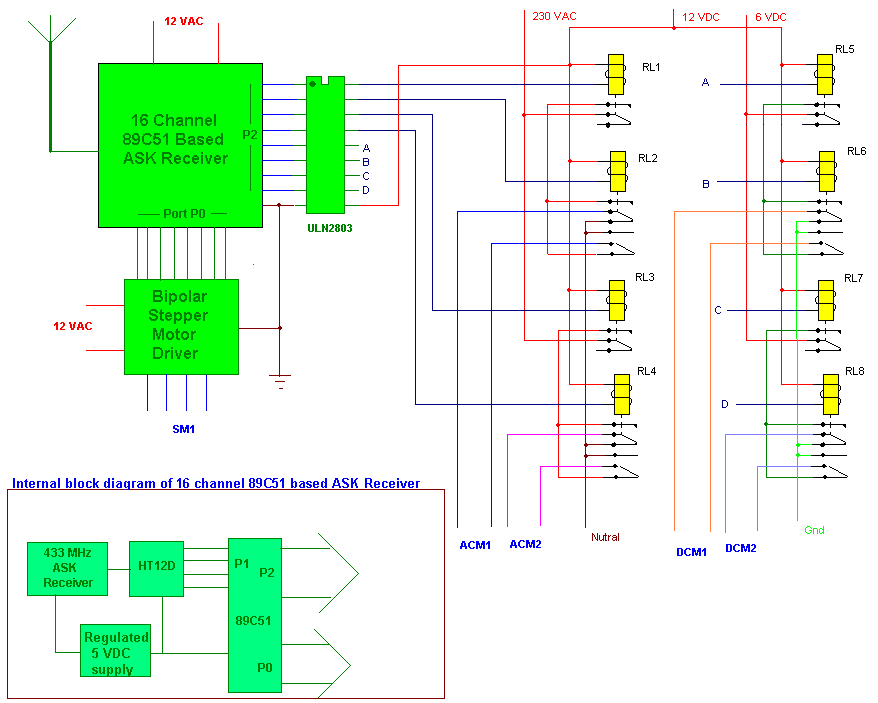
Os blocos principais do receptor são o receptor ASK baseado em 89C51, o chip de driver de corrente ULN e o driver de motor de passo bipolar.
O chip ULN é usado para energizar 8 relés que ligam ou desligam todos os quatro motores (2 motores CA e 2 motores CC) e também mudam sua direção. Existem 8 relés, dos quais 4 são de comutação única (c/o) e os outros 4 são de duas comutação. Para iniciar ou parar o motor e também mudar sua direção, são necessários um único relé c/o e um relé de dois c/o. A conexão é feita de forma que quando o relé de c/o único é energizado ele dá partida no motor e quando desenergizado para o motor. O segundo relé 2 c/o muda a direção à medida que muda de uma posição para outra. Assim, cada motor precisa de dois relés, um para partida e parada e o segundo para mudança de direção.
O circuito de ponte H padrão é usado no driver de motor de passo bipolar. Para mais detalhes deste circuito clique aqui.
Os blocos internos do receptor também são indicados no canto. As peças principais são o receptor ASK de 434 MHz, chip decodificador (HT12D) e microcontrolador 89C51. O receptor ASK demodulará o sinal e fornecerá os dados codificados ao decodificador. O decodificador irá decodificá-lo e enviá-lo para 89C51. A porta P0 de 89C51 é usada para controlar o motor de passo através do driver e a porta P2 é usada para controlar outros quatro motores através do chip ULN. Todos os oito pinos de P2 acionam um relé através do chip ULN.
O coração de todo o circuito é o 89C51, pois ele lida com todas as funções, como obter o código do decodificador, compará-los com os códigos armazenados, controlar o movimento da mão acionando qualquer um dos cinco motores. Ele executa oito funções diferentes, conforme informado pelo transmissor ao obter oito códigos diferentes. Possui oito sub-rotinas para essas funções. Cada código, quando recebido e decodificado, chamará uma sub-rotina específica. Quando a sub-rotina é executada, o programa espera novamente pelo próximo comando do usuário. Podemos enviar apenas um comando por vez, portanto, apenas um movimento é acionado por vez.
Operação de trabalho: –
- Ao pressionar qualquer um dos botões de comando do programa de computador, um dos códigos será enviado para a porta LPT. Por exemplo, o código 02h é enviado para girar o ponteiro no sentido anti-horário
- O transmissor ASK conectado ao LPT transmitirá o código pela portadora de 434 MHz
- No lado do receptor, o receptor ASK demodula o código e o entrega ao chip decodificador
- O código decodificado é fornecido para 89C51. Ele comparará este código com os códigos armazenados e quando for encontrada uma correspondência, energizará RL1 e RL2 para girar ACM1 no sentido anti-horário, de modo que o ponteiro gire no sentido anti-horário. O controlador moverá exatamente o ponteiro para 30ó e então para.
- Agora o controlador irá esperar pelo próximo comando
- Novamente, quando o próximo botão de comando é pressionado, o mesmo processo se repete