1. Rolamentos lineares e outros componentes de orientação de movimento linear
Os componentes de orientação de movimento linear são os componentes mais comumente usados em mecanismos de movimento automatizados para transferência, manuseio, posicionamento e montagem.
Aqui, compararemos rolamentos lineares, guias deslizantes e buchas isentas de óleo e nos concentraremos no uso de rolamentos lineares.
(1) Comparação das características dos rolamentos lineares
Uma comparação aproximada das características dos três componentes de orientação de movimento linear está resumida na tabela abaixo.
| Tipos | Capacidade de carga | Coeficiente de fricção | Precisão do guia | Resistência Ambiental | Capacidade de manutenção | Preço |
| Rolamentos Lineares | △ | ó | ó | △ | △〜○ | Preço baixo |
| Guias Lineares | ó | ó | ó | △ | △〜○ | Preço Alto |
| Buchas Autolubrificantes | △ | × | △ | ○ | ○ | Preço moderado |
Abaixo está uma introdução à relação entre as características acima e a construção.
(2) A correlação entre as características e a construção das peças orientadoras lineares.
1. Diferenças de desempenho em relação à capacidade de carga:
- Rolamentos lineares e buchas autolubrificantes.
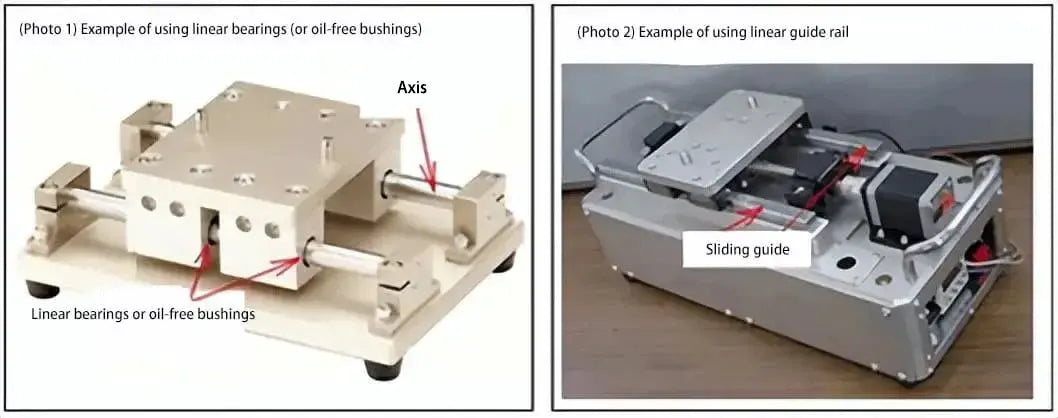
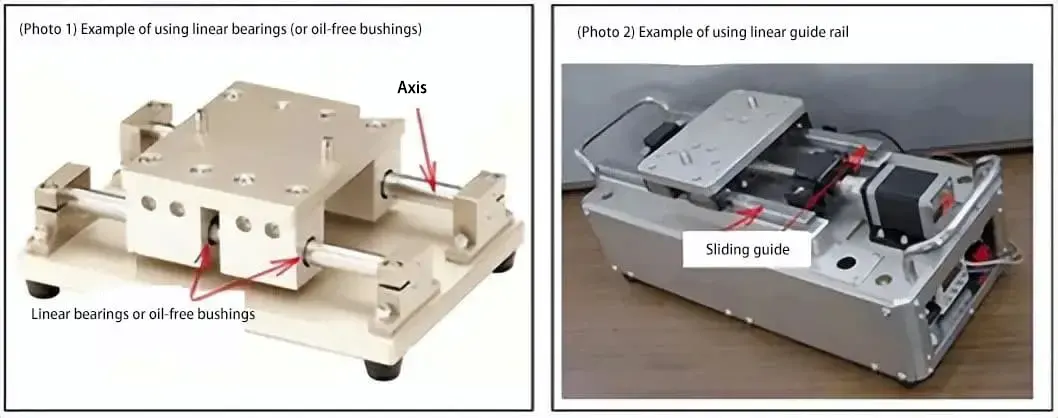
a) Os componentes móveis com mancais lineares ou buchas autolubrificantes são geralmente montados em um eixo (trilho-guia) apoiado em estruturas de suporte em ambas as extremidades para cumprir sua função de movimento. Ao transportar grandes cargas, o eixo se deforma facilmente (ver (foto 1)).
(Além disso, ao guiar linearmente verticalmente, uma estrutura simples que ignora o problema de carga pode ser usada, pois o eixo não precisa suportar a carga do componente móvel.)
- Guias lineares
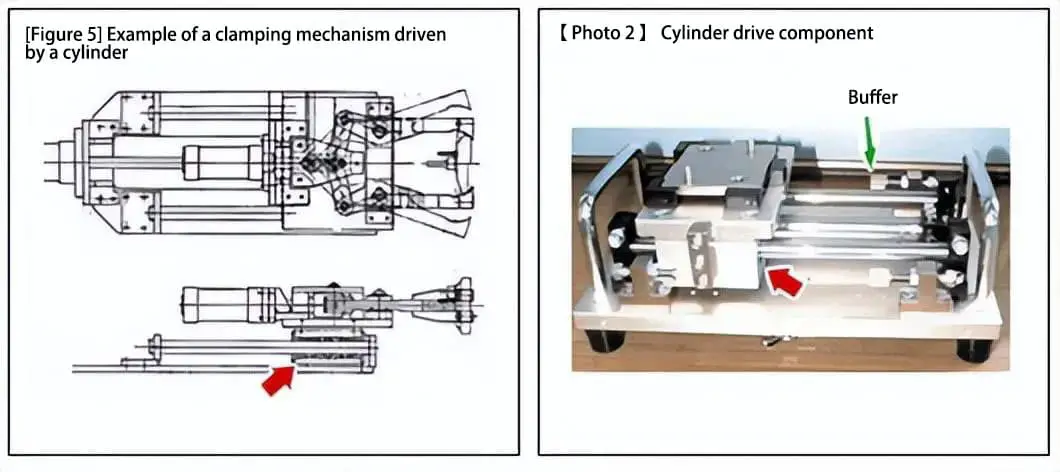
b) Os componentes móveis movem-se sobre trilhos-guia fixos montados na base, que apresentam excelentes características de suporte de carga (ver (foto 2)).
Rolamentos lineares e buchas autolubrificantes => Movimento linear em um eixo (trilho-guia) fixado em ambas as extremidades => movimento linear com cargas leves a médias.
Guias lineares => Movimento linear em trilhos guia fixados na base => movimento linear com cargas leves a pesadas.
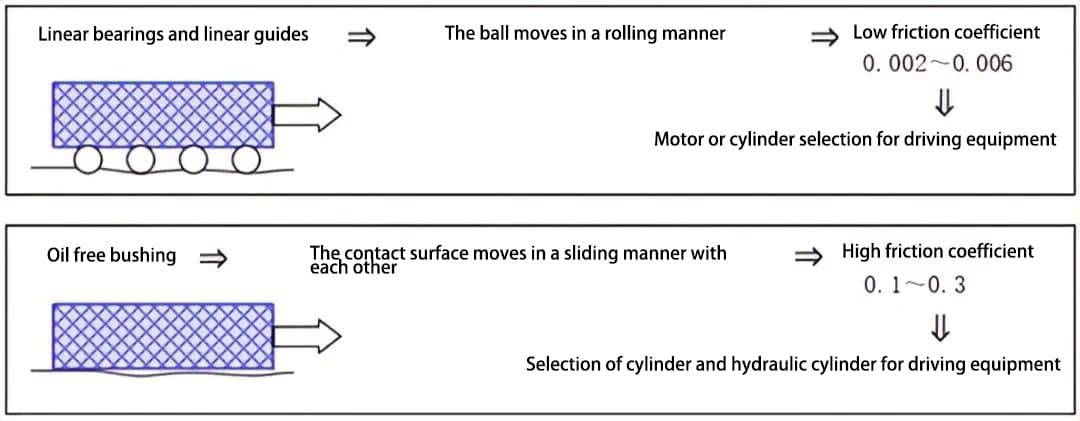
2. Diferenças de desempenho em relação ao coeficiente de atrito:
Aqui, as diferenças no método de deslizamento guiado (rolamento ou deslizamento superficial) determinam as diferenças de desempenho. A diferença no coeficiente de atrito está diretamente relacionada à seleção do atuador de acionamento.
a) Pequena resistência de atrito = pequena força de atrito = pode ser acionada por um motor de pequeno torque = o movimento rotativo pode ser convertido em movimento linear.
b) Grande resistência ao atrito = grande força de atrito = requer grande torque ou acionamento de empuxo = pode ser acionado diretamente por um cilindro linear.
■ Precauções de uso
O tamanho do coeficiente de atrito afeta a capacidade do equipamento de acionamento e a quantidade de calor gerada durante a operação. As buchas autolubrificantes não são adequadas para operação contínua em alta velocidade com alta geração de calor.
Ao usar um cilindro, a velocidade inicial/parada não pode ser controlada como acontece com um motor. A operação em alta velocidade e a supressão de vibração podem ser alcançadas através da instalação de mecanismos de frenagem flexíveis, como amortecedores e amortecedores.
3. Diferenças de desempenho em relação à precisão da guia:
Basicamente, o desempenho é determinado pela folga entre o rolamento e o trilho-guia.
a) No caso de rolamentos lineares, um eixo cilíndrico é utilizado como trilho guia, e a folga entre o rolamento e o trilho guia é definida como “ajuste de interferência: g6” ou “ajuste de transição: h5”, e o rolamento desliza em um estado de “lacuna” mínima.
b) Para guias lineares, são usados trilhos-guia dedicados e rolamentos de alta precisão e trilhos-guia com folga pequena (0-3 μm) ou tipo pressurizado (-3-0 μm) são emparelhados.
c) Comparadas aos rolamentos lineares, as buchas autolubrificantes possuem maior folga entre o trilho-guia (eixo), resultando em menor precisão no guiamento.
■ Precauções de uso
Os estados de contato entre a esfera e o trilho-guia são diferentes para rolamentos lineares e guias lineares. Os rolamentos lineares têm um estado de contato pontual, onde a parte de contato suporta localmente uma grande carga.
A porção de contato entre o trilho guia e o rolamento de esferas nas guias lineares adota um formato de ranhura, permitindo que a esfera esteja em um estado de contato superficial com a superfície do trilho guia e, portanto, a carga de contato seja dispersa.
Existem também diferenças nas características da capacidade de suporte de carga entre os dois no que diz respeito ao estado de contacto na porção deslizante. ((Figura 1) e (Figura 2))
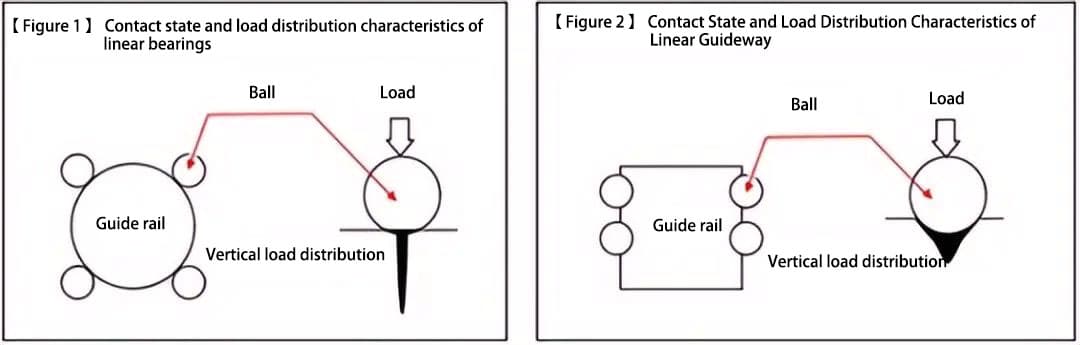
- Rolamentos lineares => estado de contato pontual => distribuição de carga vertical irregular => não adequado para condições de carga elevada.
- Guias lineares => estado de contato com a superfície => distribuição de carga vertical dispersa => podem suportar cargas relativamente altas.
4. Sobre resistência ambiental e capacidade de manutenção:
Esta diferença de desempenho é determinada pelas diferenças nos materiais constituintes.
a) Os rolamentos lineares e as guias lineares podem alcançar confiabilidade a longo prazo devido ao efeito do óleo lubrificante (graxa), de modo que o ambiente de trabalho não pode exceder o índice de resistência ambiental do óleo lubrificante.
b) As buchas autolubrificantes são geralmente utilizadas em ambientes onde não há óleo lubrificante e possuem boa resistência ambiental e facilidade de manutenção.
2. Distinção entre tipos lineares e flangeados
A seguir explicamos as diferenças nos formatos externos dos rolamentos lineares (tipo linear e tipo flangeado) e os cuidados a serem tomados durante a montagem.
(1) Tipo linear e tipo flangeado de rolamentos lineares
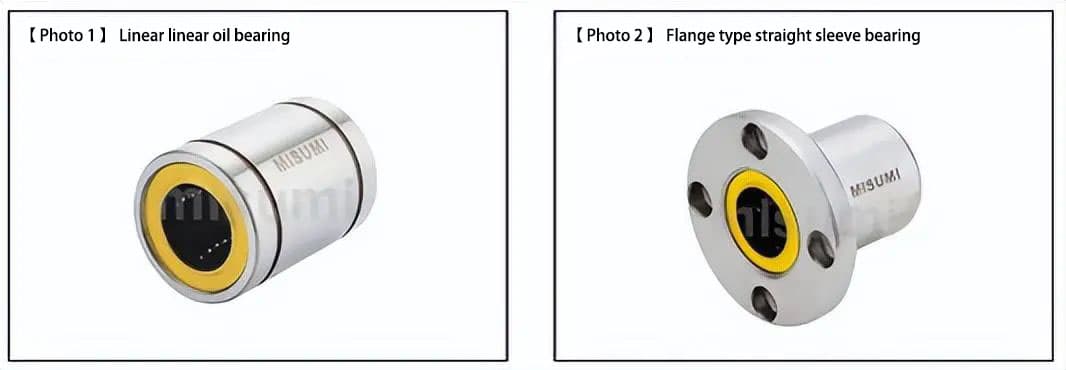
(Foto 1) mostra o tipo linear e (Foto 2) mostra o tipo flangeado.
O rolamento linear tipo flangeado (Foto 2) apresenta as seguintes vantagens:
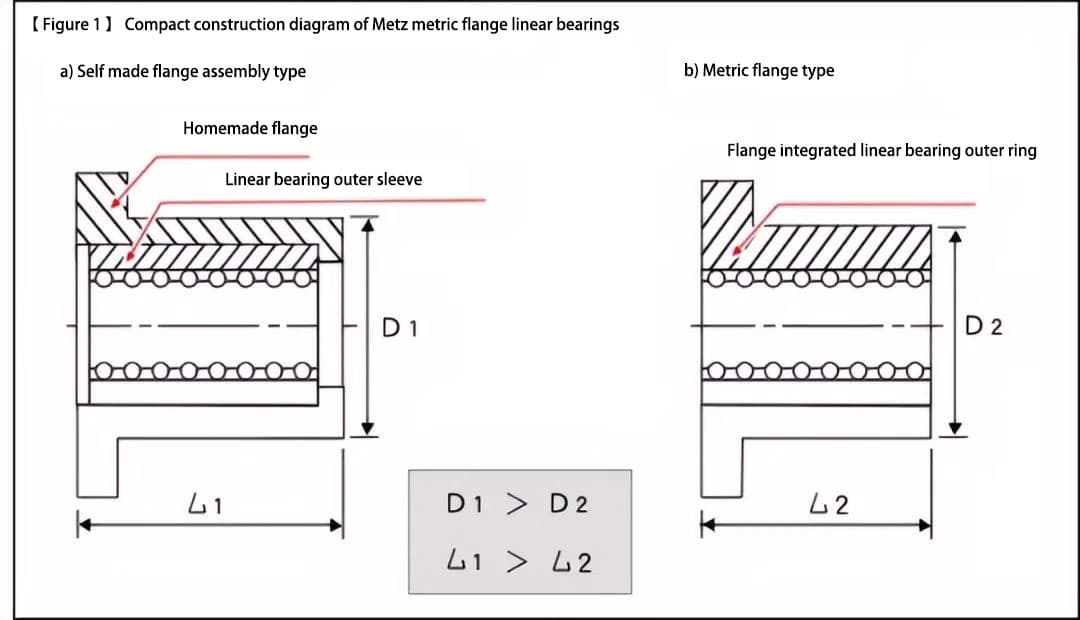
Possui estrutura mais compacta por adotar uma construção integrada de mancal linear e luva de eixo flangeada ((Figura 1)).
Comparado a um rolamento linear combinado com um flange produzido separadamente, apresenta vantagens como baixo custo, curto prazo de entrega e qualidade estável.
(Figura 1) é um diagrama esquemático que explica a estrutura compacta do rolamento linear flangeado. A estrutura de montagem do mancal linear com o flange e o formato da luva do eixo são muito longos, enquanto o mancal linear flangeado adota uma estrutura integrada, que é mais compacta. Este design compacto permite manter o desempenho de suporte de carga.
(2) Distinguir entre tipos lineares e tipos de flange
Escolha tipos de rolamentos lineares ou de flange de acordo com os seguintes critérios: Selecione tipos de flange de rolamentos lineares se eles suportarem carga.
Escolha com base no espaço circundante e nas superfícies de construção em torno da instalação dos rolamentos lineares. Consulte o item (3) para métodos de instalação e precauções relativas aos rolamentos lineares.
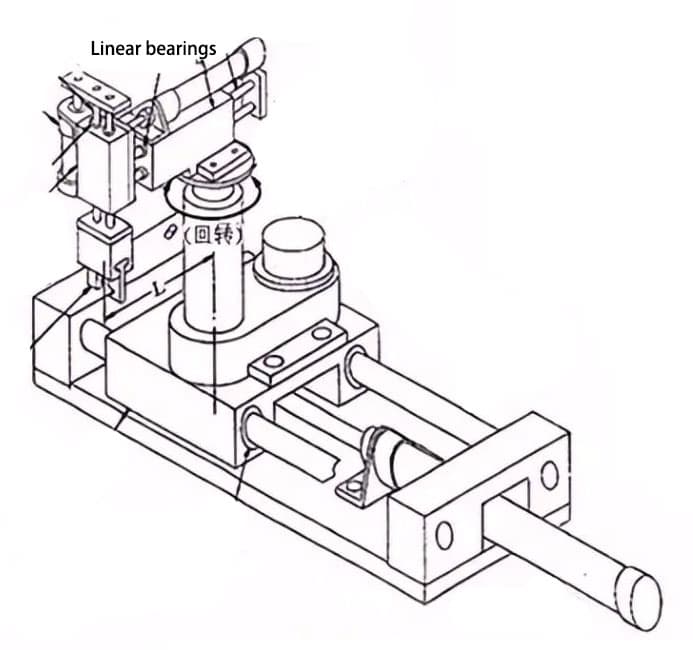
Os rolamentos lineares são divididos em tipos automovíveis e fixos no eixo para rotação do eixo. A Figura 2 ilustra a construção de uma plataforma acionada XYZ-θ com o eixo como eixo guia. Os rolamentos são classificados de acordo.
- a) Eixo X: Os rolamentos lineares são automovíveis e do tipo flange.
- b) Eixo Y: Os rolamentos lineares são fixos (na direção do eixo Θ) e permitem o movimento na direção do eixo A.
- c) Eixo Z: Os rolamentos lineares são fixados na direção do eixo Z e permitem o movimento na direção do eixo Y.
Para tipos lineares, selecione métodos de fixação com anel elástico ou placa limitadora com base na resistência desejada da fixação.
a) A parte móvel da seção no eixo X está sujeita à força inercial do peso da parte móvel suportada pelo mancal linear. O rolamento linear precisa ser firmemente fixado.
b) O mancal linear é fixado no assento do mancal, e devido à utilização de um cilindro para acionamento da estrutura do eixo, a fixação axial do mancal linear suporta apenas a força de reação do atrito, portanto foi adotado um design compacto para o tipo linear. Além disso, os mancais lineares do eixo Y são ajustados na direção oposta aos dois eixos em relação ao eixo de rotação da plataforma acionada θ, permitindo alta rigidez em relação ao torque rotacional.
c) Se considerarmos a partir da direção do eixo móvel, é igual a b) e não suportará grandes forças.
(3) Métodos de instalação e precauções para rolamentos lineares.
(1) Métodos de instalação para rolamentos lineares
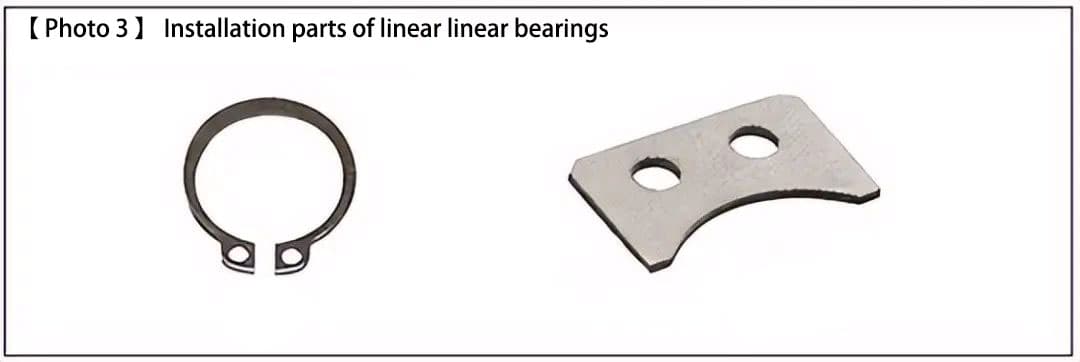
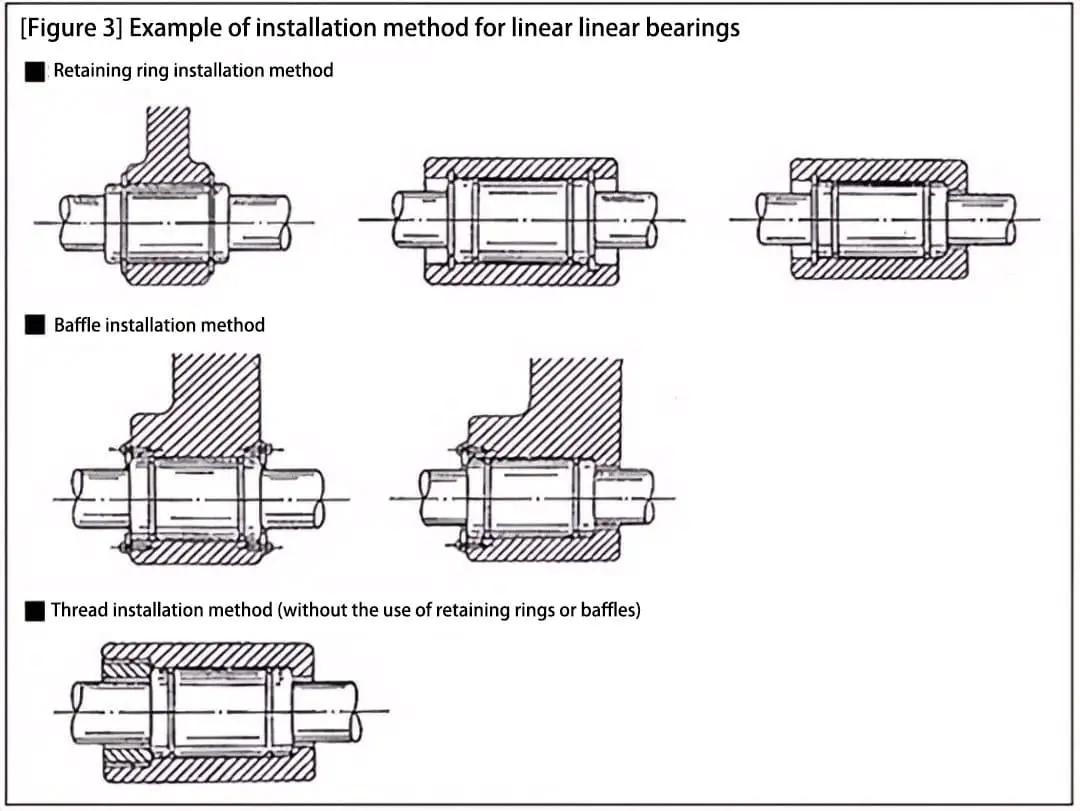
Os rolamentos lineares são geralmente instalados usando anéis elásticos ou placas limitadoras (consulte (Foto 3) e (Figura 3)).
(2) Precauções para o ângulo de instalação de rolamentos lineares
Devido às diferenças no diâmetro e tipo do eixo, bem como ao número de fileiras de esferas no rolamento, os rolamentos lineares geralmente possuem de 4 a 6 fileiras de esferas dispostas em ângulos iguais. Ao utilizar rolamentos lineares horizontalmente, evite instalá-los com as fileiras de esferas na posição diretamente acima (conforme mostrado no lado esquerdo da (Figura 4)), pois isso pode resultar em cargas concentradas.
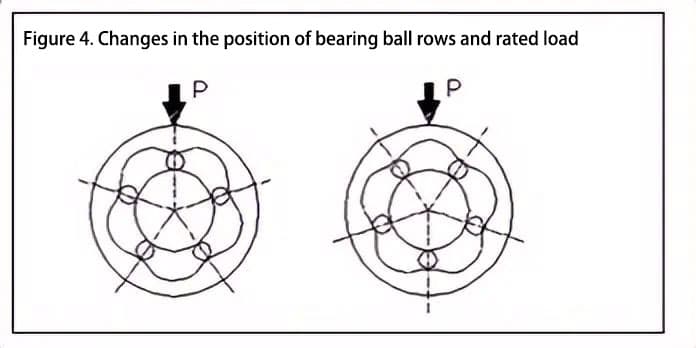
(Figura 4) mostra um rolamento de esferas de 5 carreiras, e a relação dos valores de carga nominal é mostrada abaixo (lado direito ÷ lado esquerdo). Portanto, a instalação deve ser feita o mais próximo possível do ângulo de instalação mostrado no diagrama acima.
- Carga estática nominal (lado direito ÷ lado esquerdo) = 1,46
- Classificação de carga dinâmica (lado direito ÷ lado esquerdo) = 1,19
3. Diferenciação de rolamentos com revestimento simples, revestimento duplo, estendidos e com superfície tratada.
(1) Comprimento do rolamento e desempenho de orientação
Os rolamentos lineares podem ser divididos em quatro tipos com base no comprimento do rolamento:
- (1) linha única
- (2) forro duplo
- (3) estendido
- (4) projetado pelo cliente (usando dois tipos de linha única).
A diferença no comprimento do rolamento afeta diretamente o desempenho da orientação da seguinte forma:
- a) Capacidade de carga
- b) Precisão de orientação
a) Relação entre comprimento de suporte e capacidade de suporte de carga
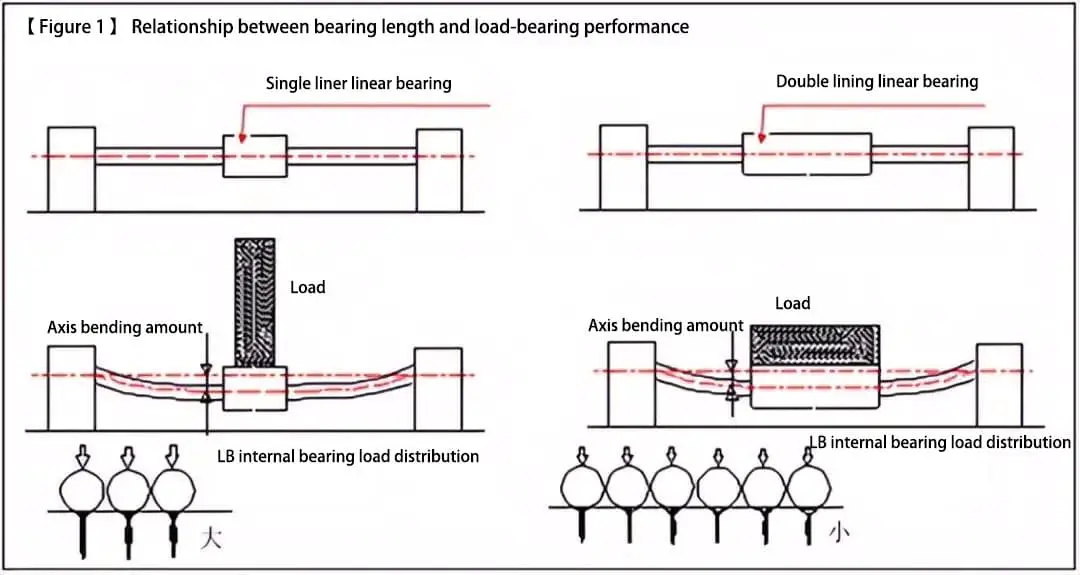
Quanto mais longo for o rolamento, mais pontos de apoio existirão e menor será a carga necessária para cada ponto de contato do rolamento. Esta conclusão pode ser tirada da situação real onde a carga nominal dos três tipos (1), (2) e (3) de rolamentos lineares aumenta sequencialmente com o seu comprimento.
Portanto, a escolha de um comprimento de rolamento linear mais longo pode melhorar a capacidade de carga do produto (= aumento da vida útil e da confiabilidade) ((Figura 1)).
b) Relação entre comprimento do rolamento e precisão de orientação
Quanto maior for o comprimento do rolamento, maior será a precisão da orientação.
| 1) | Ao calcular a média do erro de orientação do trilho-guia (eixo), a precisão do produto pode ser melhorada (consulte a nota correspondente para obter detalhes) ((Figura 2)). |
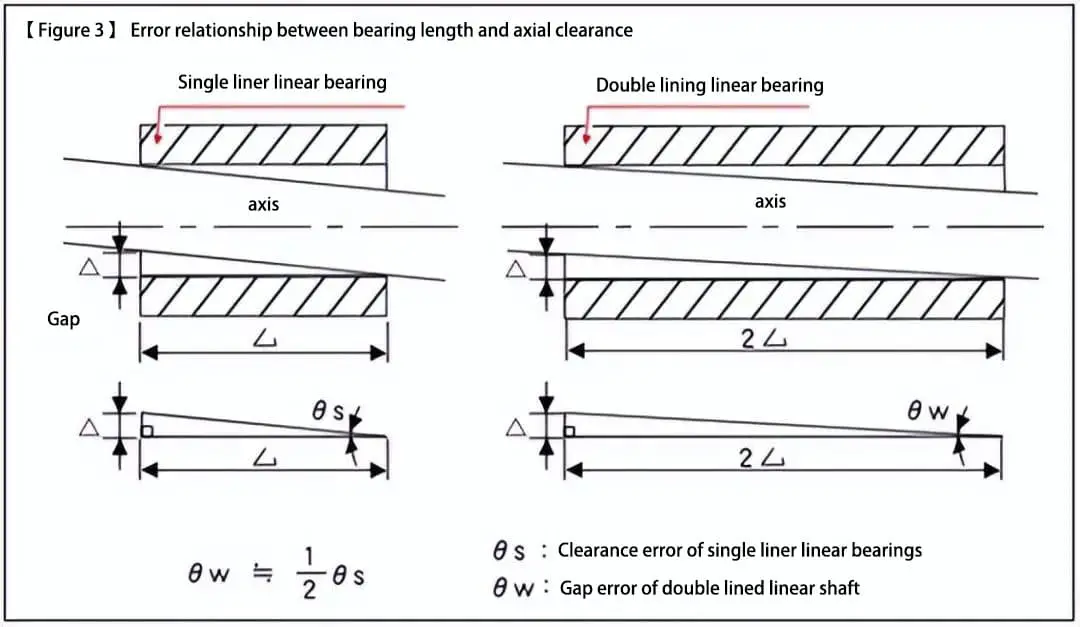
| 2) | A precisão do produto pode ser melhorada reduzindo o erro de folga entre o trilho-guia (eixo) ((Figura 3)). |
O efeito médio dos rolamentos: Ao aumentar o comprimento do rolamento guia linear, o número de suportes de rolamento é aumentado e os fatores de erro na superfície guia (rugosidade superficial e deformação por flexão) podem ser calculados, com o efeito do erro fator suprimido para menos da metade.
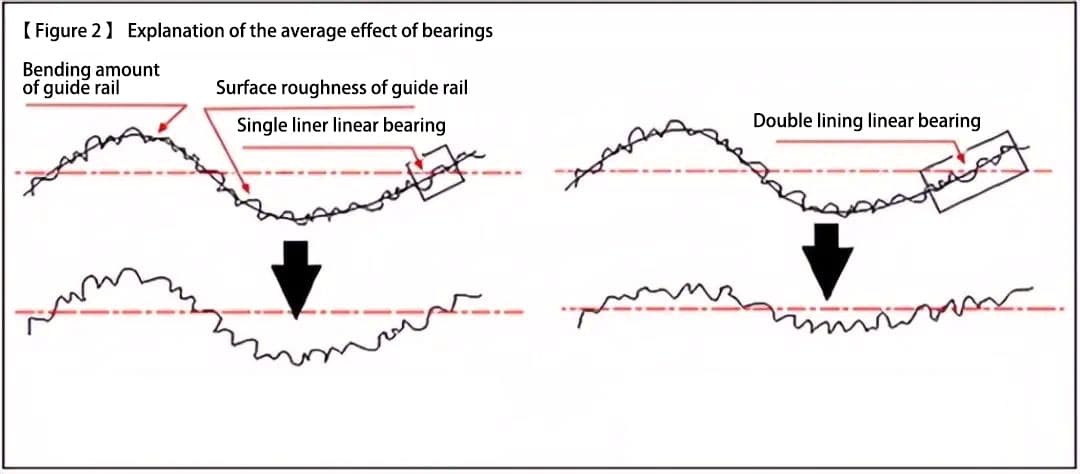
Portanto, ao aumentar o comprimento do rolamento, a capacidade de suporte de carga e a precisão da orientação podem ser melhoradas.
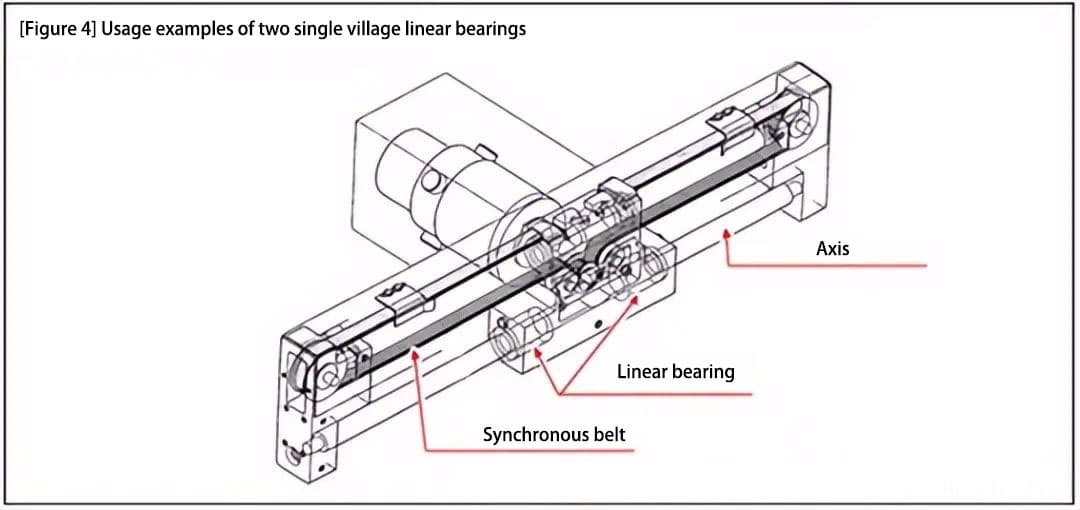
Portanto, o tipo (4) (que usa um design dedicado com dois tipos de revestimento único) de rolamento linear é frequentemente usado em ambientes de trabalho de alta precisão até certo ponto ((Figura 4)).
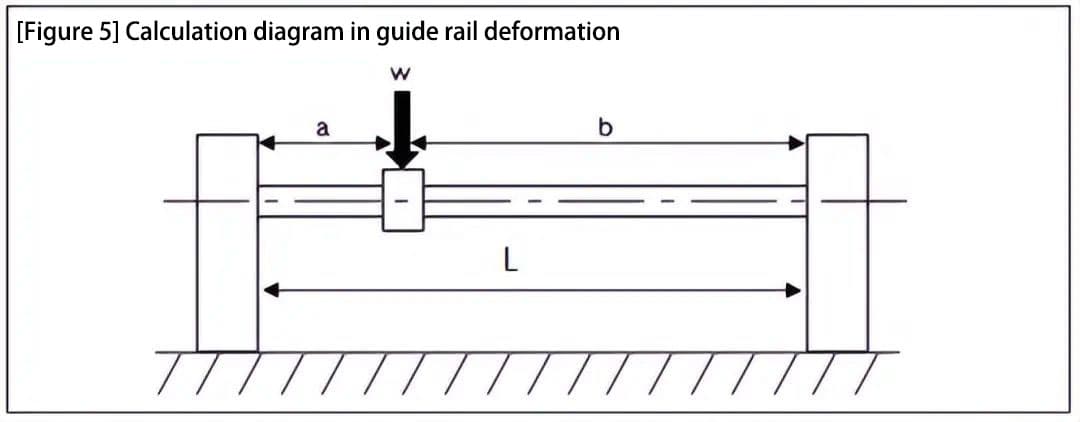
(2) Cálculo da deformação do trilho-guia (eixo) ((Figura 5))
Em um mecanismo linear composto por um rolamento linear e um eixo, a deformação do eixo pode ser calculada usando a seguinte equação:
δ = (W * uma3 *b3) / (3 * E * I * L3)
onde:
- a: Distância do ponto final do suporte até a posição de carga
- b: Distância do ponto final do apoio no lado oposto de a até a posição de carga
- L: Distância entre suportes de eixo
- E: Módulo de Young
- I: Segundo momento da área da seção transversal
- Eu = πd4/64 ≈ 0,05d4
- d: Diâmetro do eixo
- W: Carga suportada pelo rolamento linear (unidade: N)
Quando a = b = L/2, δ = W * L3 / (9,6 * E * d4).
Portanto, se quiser reduzir a deformação do eixo, você deve adotar uma abordagem de projeto que aumente o diâmetro do eixo (4 vezes o efeito) ou encurte a distância entre os suportes do eixo (3 vezes o efeito).
(3) Características e exemplos de aplicação de materiais componentes e tratamento de superfície
Os materiais constituintes, tratamentos de superfície e exemplos de aplicação de rolamentos lineares são apresentados na tabela a seguir:
| Material do anel externo | Tratamento da superfície | Material de retenção | Material da bola | Exemplos de aplicação: |
| SUJ2 | – | Equivalente a Resina/SUS440C | SUJ2 | Guia deslizante com requisito geral de resistência ao desgaste. |
| SUJ2 | Cromagem preta de baixa temperatura | O mesmo que acima. | Equivalente ao SUS440C | Movimento de precisão para componentes ópticos sem reflexo em ambiente livre de poeira. |
| SUJ2 | Ni-P Químico | O mesmo que acima. | O mesmo que acima. | Peças deslizantes resistentes a produtos químicos em ambientes livres de poeira que exigem resistência ao desgaste. |
| Equivalente ao SUS440 | – | O mesmo que acima. | O mesmo que acima. | Carga leve em ambiente livre de poeira e equipamentos utilizados nas áreas alimentícia e médica. |
Características Comparativas de Tratamentos de Superfície.
| Material do anel externo: | Tratamento da superfície | Características: |
| SUJ2 | – | SUJ2 é feito de ferro e pode enferrujar. |
| O mesmo que acima. | Cromo preto de baixa temperatura | Baixo coeficiente de atrito e boa resistência ao desgasteCapaz de formar um revestimento fino e uniforme de cor preta que não reflete luz e apresenta boa absorção de calor. |
| O mesmo que acima. | Revestimento químico de Ni-P | Excelente resistência a agentes químicos e corrosão, frequentemente utilizado em salas limpas. Revestimento rígido com acabamento brilhante e não magnético. |
4. Exemplo de Aplicação de Mancais Lineares em Equipamentos Automáticos Simples
As características dos rolamentos lineares são descritas abaixo:
- Rolamentos de orientação simples e de baixo custo com desempenho médio. (Alta relação custo-benefício)
- Baixo coeficiente de atrito, facilitando a seleção do acionamento. (Cilindro de baixo custo ou tipo de motor de preço médio)
- Ao combiná-lo com uma correia síncrona, pode-se obter um projeto de construção de condução silencioso e leve.
- No caso da orientação direcional vertical, a utilização do método de condução por centro de gravidade permite um projeto de construção simples e compacto.
A utilização e as características dos rolamentos lineares são explicadas a seguir através de um exemplo de sua aplicação em equipamentos automatizados simples.
(1) Motor de passo e acionamento por correia síncrona
A construção do acionamento por correia síncrona apresenta vantagens como silêncio, leveza, baixo custo e não necessidade de lubrificação. Para a situação da mesa de trabalho do eixo X/Y/Z, o conceito de projeto usual é reduzir a carga no motor do eixo X inferior, aliviando o eixo Y superior.
Portanto, o eixo Y é frequentemente construído usando uma correia síncrona.
a) (Figura 1) mostra um mecanismo típico de acionamento de 3 eixos X/Y/Z.
O eixo X é feito de guias lineares, enquanto o eixo Y e o eixo Z são construídos com rolamentos lineares. O sistema de acionamento utiliza correias síncronas e fusos de esferas.

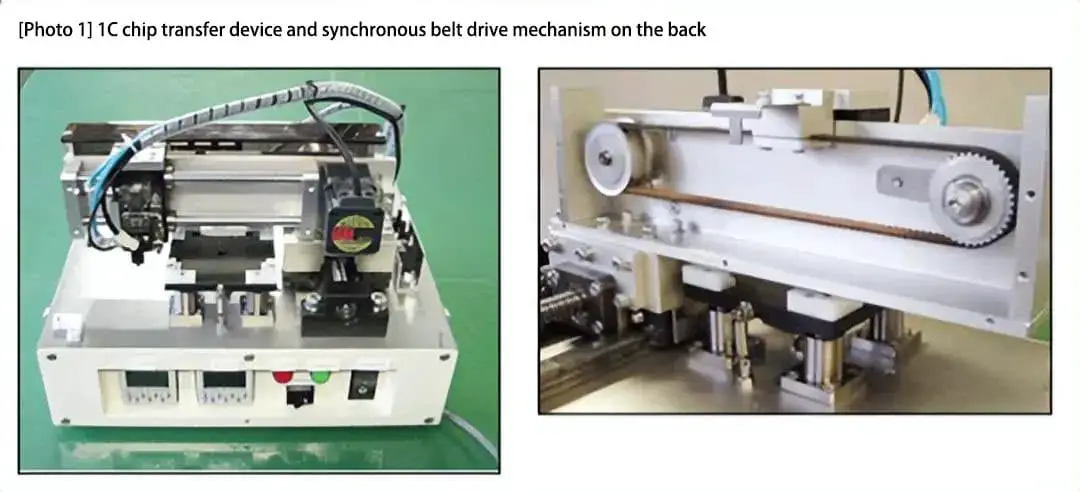
b) (Foto 1) mostra um exemplo de aplicação do eixo Y em um dispositivo de montagem de chip IC. A direção do eixo Y é convertida em movimento alternativo por uma correia síncrona.
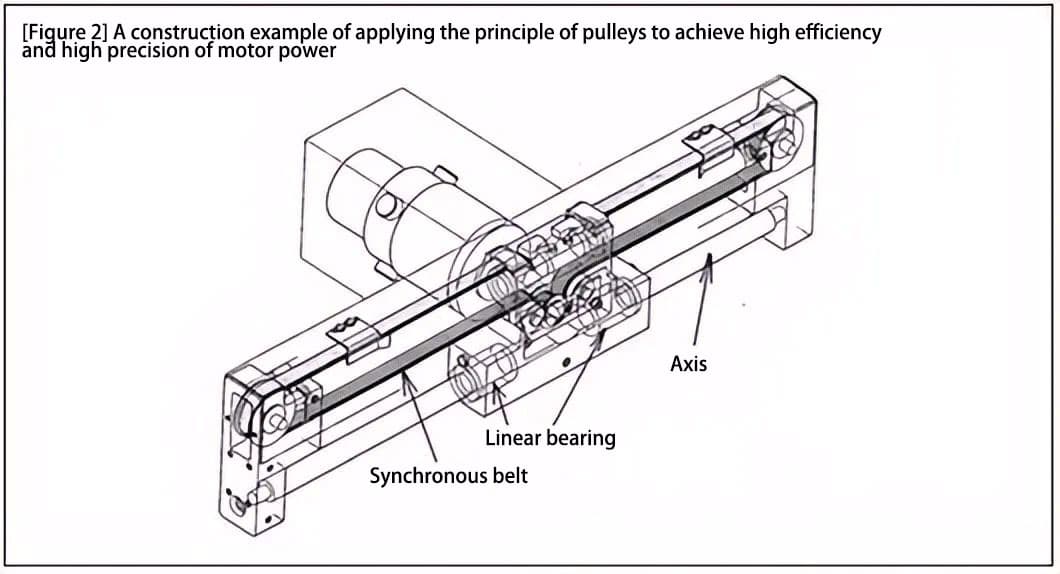
c) (Figura 2) mostra um exemplo de aplicação de um robô de eixo único com as seguintes características:
- Dois rolamentos lineares são usados com uma grande extensão para melhorar a capacidade de rolamento e a precisão da orientação.
- O projeto e a estrutura da correia e polia síncrona usam um princípio de polia rolante ((Figura 3)) para obter alta eficiência da potência do motor e posicionamento de alta precisão.
- A transmissão por correia síncrona é leve e silenciosa.
- A correia síncrona e o eixo são dispostos paralelamente para cima e para baixo e, mesmo com uma estrutura de eixo único, a rotação relativa entre o eixo e o rolamento linear pode ser restringida.
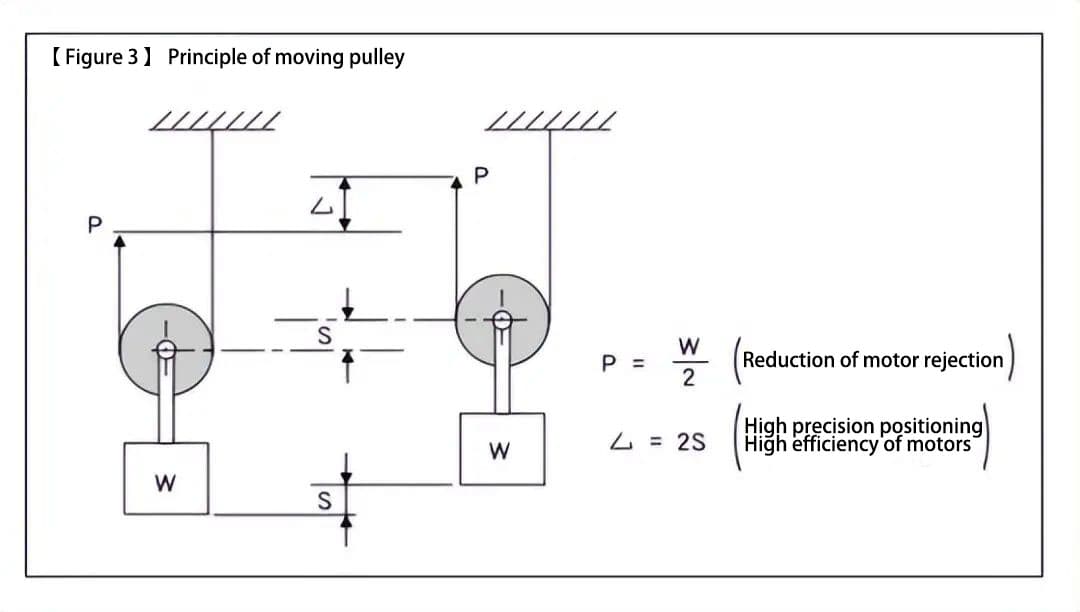
Princípio da polia móvel:
Para elevar o objeto de elevação na Figura 3 por uma distância S, a trava de corda precisa ser movida duas vezes a altura, mas a força necessária é apenas metade do peso do objeto de elevação, que pode facilmente levantar o objeto de elevação.
2 vezes a distância móvel
<1> Precisão de posicionamento que pode melhorar a resolução mínima da rotação do motor
<2> Reduza o erro de recuo e marcha lenta da polia pela metade
<3> Acionamento de rotação de alta velocidade (2x) do motor, resultando em alta eficiência do motor
1/2 vezes a carga
<4> Pode ser acionado por motor de baixa potência (sem necessidade de engrenagens de redução, etc.)
(2) Motor de passo e fuso de esfera
O método de acionamento do fuso de esferas possui as seguintes características: (1) converte diretamente o movimento rotativo do motor em movimento linear e (2) o passo do fuso de esferas tem a função de um redutor. A eficiência de transmissão da força motriz e a eficiência do motor são relativamente altas.
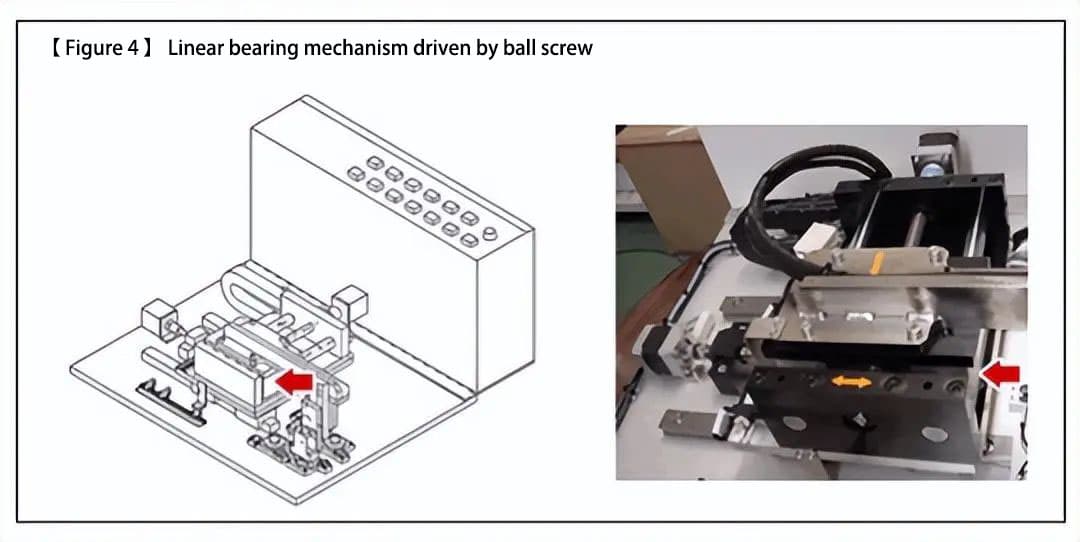
(Figura 4) é um mecanismo de acionamento no qual o eixo Y utiliza um rolamento linear e um parafuso esférico. Isso geralmente é aplicado a mecanismos que exigem alimentação unitária ou que possuem requisitos de precisão de posicionamento.
Informações adicionais:
a) Características de um motor de passo
Os motores de passo têm a característica de produzir alto torque na faixa de baixa velocidade (geralmente na partida e na desaceleração), tornando-os adequados para movimentos de curta distância e controle de posicionamento multiponto.
b) Precisão necessária do motor para alcançar a precisão do posicionamento do alvo
Precisão de posicionamento do alvo = ±0,01 (mm). Ao selecionar um avanço do fuso de esferas de 10 (mm/rot), a precisão necessária (divisões) do motor de passo pode ser calculada usando a seguinte fórmula.

(3) Acionamento do cilindro
(Figura 5) é um exemplo de rolamento usado para acionamento de cilindro em um mecanismo de fixação, enquanto (Foto 2) é um exemplo de mecanismo de acionamento de cilindro que utiliza um acoplamento magnético. Ambos usam rolamentos lineares (indicados pelas setas) para orientação.
Não é possível controlar a velocidade de partida e parada com acionamento de cilindro, portanto deve ser utilizado um amortecedor para reduzir o impacto na parada (conforme mostrado na (Foto 2)).
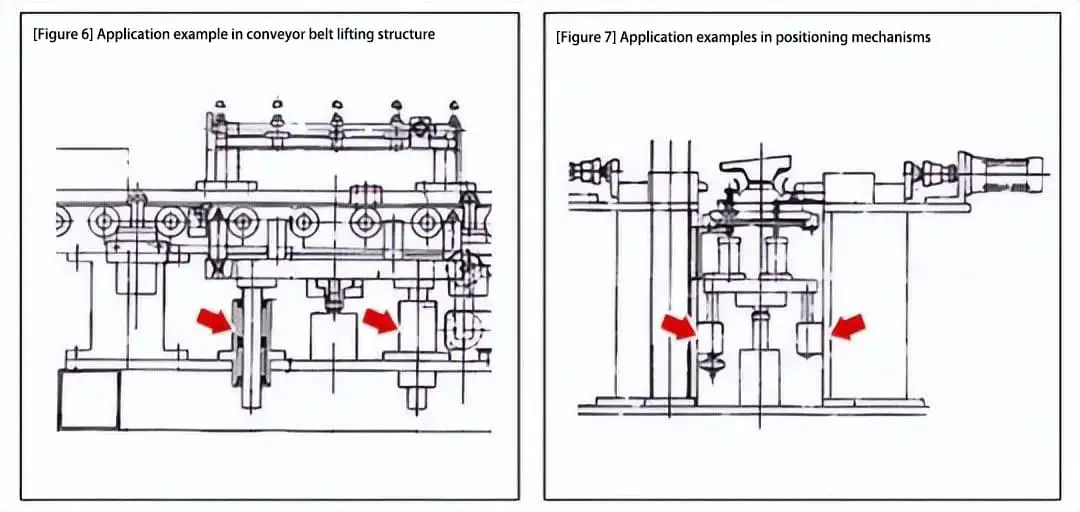
(4) Exemplos de orientação vertical
A orientação vertical pode ser obtida usando rolamentos lineares com flanges. Não é necessária uma estrutura de suporte específica para fixar a instalação dos mancais lineares, o que permite um projeto estrutural simples e compacto (no caso de guias deslizantes, onde deve ser instalado um substrato de montagem vertical para o trilho-guia fixo).
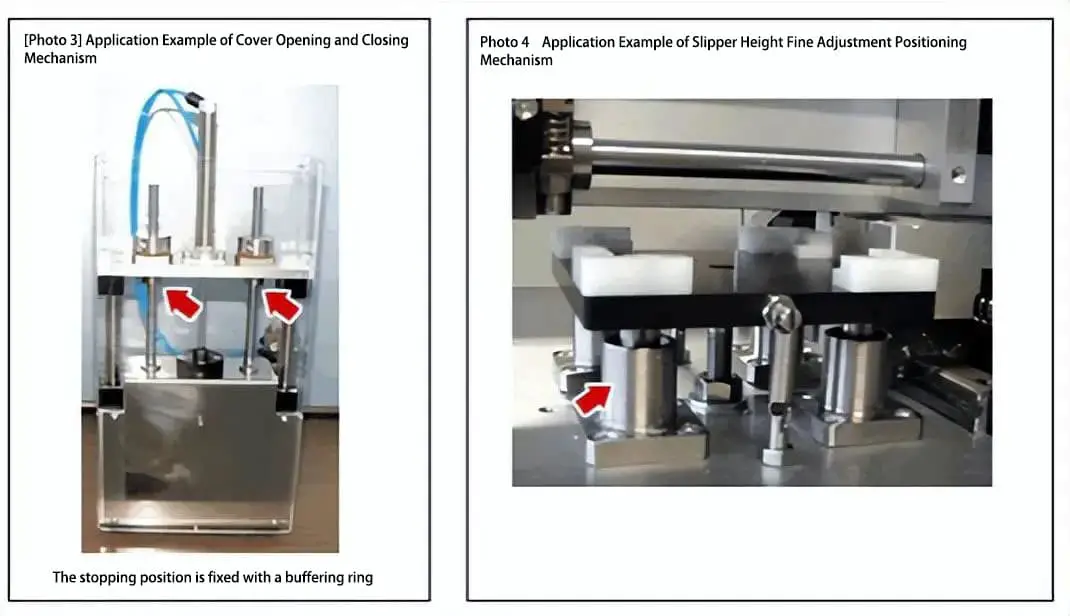
Semelhante à estrutura da (Foto 4), a guia de levantamento (mostrada na (Figura 6)) e o mecanismo de posicionamento (mostrado na (Figura 7)) da parte inferior da correia transportadora também utilizam mancais lineares flangeados.