Este é o projeto mais incrível e comercialmente viável em que a webcam conectada ao seu computador se moverá nas quatro direções, de cima para baixo e da esquerda para a direita, com a ajuda da ponta dos dedos.
O software escrito em VC++ controlará dois motores CA diferentes com a ajuda do mouse do computador. O movimento para frente e para trás desses motores moverá a webcam para cima e para baixo ou da esquerda para a direita, dependendo da escolha. Existem dois modos para mover a câmera nas quatro direções. 1) Automático e (2) manual. No modo automático, a câmera se move da esquerda para a direita, para cima e para baixo em uma sequência de programa do usuário, enquanto no modo manual ela se move dependendo do comando do usuário.
Descrição geral:-
Existem três partes básicas do projeto. (1) mecânico (2) hardware e (3) software.
A parte mecânica é a unidade da câmera que consiste na lente da câmera, dois motores CA com determinadas especificações e mecanismo interno para girar a lente. As especificações do motor são
Tipo de motor: – Motor AC reversível
Tensão máxima aplicada: – 230 VCA
RPM nominal máximo: – 5 RPM a 230 VCA
A parte do hardware é o circuito de acionamento do motor CA conectado à porta LPT do PC que irá comutar a alimentação fornecida ao motor e movê-lo de maneira adequada
A parte do software é a interface real entre o usuário e a câmera que irá gerar vários sinais através do LPT e girar dois motores CA.
Observação:-parte mecânica está pronta e disponível no mercado, portanto não discutiremos isso em profundidade
Hardware e software
Seção de hardware: –
O circuito é projetado para girar ambos os motores CA em qualquer direção. Para cada motor temos dois relés, um para ligar ou desligar o motor e o segundo para mudar de direção. Portanto, quatro relés de comutação (C/O) são conectados aos pinos LPT D0-D3 através do chip driver de corrente ULN2003A. Todos os relés são de 12 VCC, 300 ohm (tipo cubo de açúcar, montagem em PCB). Um dos terminais da bobina de todos os relés está em curto e conectado à alimentação de 12 V. O segundo terminal está conectado à saída do chip ULN. Os contatos do relé (C, NC, NO) são conectados conforme mostrado na figura do Diagrama de Circuito, Guia 1.
Aqui os relés RL1 e RL3 são para ligar/desligar os motores e RL2 e RL4 são para mudança de direção. O ACM1 é usado para mover a câmera para a esquerda e para a direita enquanto o ACM2 move a câmera para cima e para baixo. Portanto, ao trocar esses relés, a câmera se moverá nas quatro direções. A tabela abaixo lhe dará uma ideia de como um software pode mover a câmera usando a porta LPT
|
Relé(s) |
Pinos de dados |
Movimento da câmera |
Número hexadecimal |
|
RL1 |
D0 |
Da esquerda para direita |
01h |
|
RL1 e RL2 |
D0-D1 |
Direita para esquerda |
03h |
|
RL3 |
D2 |
De baixo para cima |
04h |
|
RL3 e RL4 |
D2-D3 |
De cima para baixo |
0Ch |
Seção de software: –

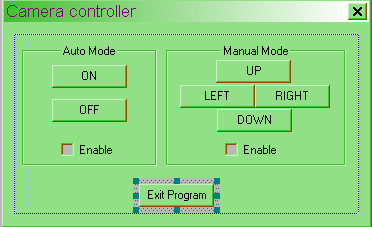
Conforme ilustrado primeiro, existem dois modos automático e manual, portanto, no modo automático o software move a câmera em uma sequência pré-programada e no modo manual o usuário (operador) pode mover a câmera a partir do teclado ou mouse. A janela do aplicativo fica assim.
Existem duas caixas de grupo, sete botões e duas caixas de seleção. Aqui estão as configurações
|
Item |
Propriedade |
Contexto |
|
Caixa de grupo 1 |
EU IA |
IDC_AUTO |
|
Caixa de grupo 2 |
EU IA |
IDC_MAN |
|
Botão 1 |
EU IA |
IDC_UP |
|
Rubrica |
ACIMA |
|
|
Botão 2 |
EU IA |
IDC_DWN |
|
Rubrica |
ABAIXO |
|
|
Botão 3 |
EU IA |
IDC_LEFT |
|
Rubrica |
ESQUERDA |
|
|
Botão 4 |
EU IA |
IDC_RGHT |
|
Rubrica |
CERTO |
|
|
Botão 5 |
EU IA |
IDC_XIT |
|
Rubrica |
SAÍDA |
|
|
Botão 6 |
EU IA |
IDC_ON |
|
Rubrica |
SOBRE |
|
|
Botão 7 |
EU IA |
IDC_OFF |
|
Rubrica |
DESLIGADO |
|
|
Caixa de seleção 1 |
EU IA |
IDC_CHECK1 |
|
Rubrica |
Habilitar |
|
|
Caixa de seleção 2 |
EU IA |
IDC_CHECK2 |
|
Rubrica |
Habilitar |
Depois de concluir o design, agora temos que anexar o código a esses botões. Temos dois botões de ativação aqui, portanto, apenas um modo será ativado por vez. À medida que você ativa um modo, o segundo será desativado. No modo manual, todos os quatro botões fornecidos enviarão o número hexadecimal fornecido na tabela acima para o endereço da porta LPT que é 0378 para que o relé específico seja energizado e gire o motor.
O modo automático é um pouco diferente. O movimento da câmera é pré-programado. A câmera se move 150 graus. Da esquerda para a direita e 150 graus. De cima para baixo. Agora como o motor é de 5 RPM significa que ele gira 1800 graus. Em 60 seg. Então, em 1 segundo, o motor gira 30 graus. Assim, para completar 150 graus, são necessários 5 segundos.
Agora o movimento está dividido em 6 etapas
- Da esquerda para a direita significa 5 segundos (01h)
- Da direita para o meio significa 2,5 seg (03h)
- Do meio para cima novamente 2,5 seg (04h)
- De cima para baixo. 5 seg (0Ch)
- De baixo para o meio. 2,5 seg (04h)
- Do meio para a esquerda novamente 2,5 seg (03h) e este ciclo se repete
Então, para isso usamos um contador que contará em intervalos de 0,5 segundos. O tempo total do ciclo é de 20 segundos, o que significa que o contador conta até 40. O programa assume que quando o modo automático está ativado, as câmeras estão na posição mais à esquerda
Diagramas de circuito
| webcam-1 | 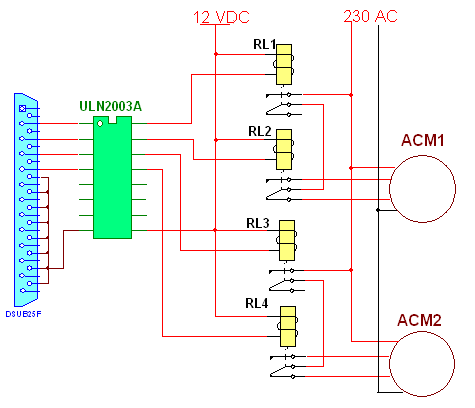 |







