Particionamento de hardware/software é o problema de dividir os cálculos de um aplicativo em uma parte que é executada como instruções sequenciais em um microprocessador (o “software”) e uma parte que é executada como circuitos paralelos em alguma estrutura de circuito integrado, como um ASIC ou FPGA (o “hardware”), de modo a atingir metas de design definidas para métricas como desempenho, potência, tamanho e custo.
Introdução:
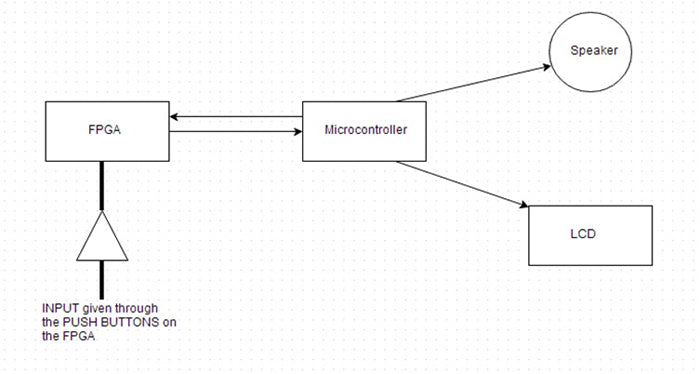
O objetivo do projeto é implementar um sistema baseado em Co-Design de Hardware/Software em uma placa Spartan 3E FPGA e um microcontrolador usando a ferramenta Xilinx IDE. Alfabetos e/ou números são inseridos através do teclado (botões no FPGA) e por sua vez exibidos no display LCD (no Microcontrolador), ao mesmo tempo em que o áudio correspondente à tecla pressionada será reproduzido em um alto-falante. O sistema é implementado tanto em hardware quanto em software. VHDL é usado como linguagem de descrição de hardware e C como software. Embora este projeto possa ser implementado apenas usando FPGA ou microcontrolador, esse não é o objetivo aqui. Queremos introduzir este conceito para que possa ser aplicado posteriormente em problemas onde o particionamento pode realmente fazer diferença no desempenho.
Arquitetura do sistema:

Fig. 1: Visão geral do co-design de software de hardware baseado em FPGA
Componentes necessários:
1. Placa FPGA Nexys 2 Spartan 3E
2. Microcontrolador – Atmega16 + LCD
3. Alto-falante de 8 ohms
4. Conectores
5. CI 74LS245
Construção:
A. FPGA
· O FPGA precisa ser configurado para receber a entrada do usuário por meio de seus interruptores de entrada (ou interruptores de botão).
· Portanto, o primeiro passo é configurar alguns interruptores como entrada para o FPGA.
· Em seguida, precisamos ter certeza de que cada chave corresponde a uma entrada diferente. Portanto, forneceremos um código (4 bits) para identificar exclusivamente cada entrada.
· Como se trata de um protótipo, definiremos apenas 4 entradas. E, portanto, codifique-os como:
Um => “0001”
B => “0010”
C => “0011”
E => “0100”
· Ou seja, assim que um interruptor for pressionado, nós o identificaremos usando o código de 4 bits exclusivo para ele.
· A próxima coisa a ser feita pelo FPGA é enviar esses 4 bits para o microcontrolador.
· Comunicação:
A comunicação pode ser Síncrona ou Assíncrona.
Se você preferir o modo assíncrono, a transmissão paralela será o modo mais rápido a ser escolhido.
Se você preferir o modo Síncrono, recomendo configurar o SPI entre o FPGA (mestre) e o microcontrolador (escravo).
Aqui usarei a Transmissão Paralela Assíncrona.
· Para transmissão, usaremos Conectores Periféricos (Conectores PMod) na placa Spartan 3E. A figura abaixo explica isso em detalhes.

Fig. 2: Diagrama de circuito do conector Nexys2 Pmod
· Podemos configurar os PMods como Input e Output. Aqui eles serão definidos como output.
B. Microcontrolador
· Esta unidade tem principalmente duas tarefas. Primeiro, exibindo o caractere no LCD. Segundo, reproduzir o som correspondente ao personagem no alto-falante.
· Tarefa 1: Mostrar
Como estamos usando comunicação paralela, cada uma dessas linhas de transmissão é conectada aos pinos de entrada correspondentes no microcontrolador. Agora, pode haver duas maneiras de garantir que os dados sejam lidos corretamente;
1. Os pinos são pesquisados continuamente para verificar se há alguma atividade. Assim que houver, o valor é lido e armazenado em uma variável.
2. Nós configuramos uma interrupção. Essa interrupção é disparada do FPGA quando as linhas de transmissão vão enviar os bits. Uma vez que a interrupção é recebida, o valor é lido e então armazenado na variável.
· O 2e método é mais eficiente que o 1st um. Portanto, vamos continuar com isso.
· Portanto, o valor é lido usando a variável PIN
· Tarefa 2: Som
Temos que tocar um som no alto-falante de 8?. Para isso, usaremos o flash interno do microcontrolador. Armazenaremos um som de amostra (digamos um bipe) na memória. E o tocaremos de acordo com a entrada. Ou seja, 'A' significa tocar o bipe uma vez. 'B' significa tocá-lo duas vezes, e assim por diante.
O microcontrolador que estamos usando aqui é o Atmega16 que possui apenas 16K Bytes de flash interno. Portanto, não podemos armazenar muitos sons diferentes nesta memória. Para conseguir isso, precisamos usar um flash externo e fazer a interface com o microcontrolador. Este não é o foco aqui, então não iremos por aí.
EPara reproduzir áudio PCM no microcontrolador AVR, usaremos o PWM de alta velocidade (modo PWM rápido) do AVR. Parece quase bom e pode ser usado para projetos simples que requerem efeitos sonoros.
Passo 1: Crie um arquivo .wav. Se você não tiver nenhum, use o link a seguir e converta texto em fala. Salve-o como arquivo .wav.
http://www2.research.att.com/~ttsweb/tts/demo.php
Passo 2: Converta o arquivo wav criado em um arquivo wav de 8.000 amostras por segundo sem sinal de 8 bits usando a opção de software da NCH. Pode ser encontrado aqui:
Etapa 3: Converta o arquivo wav de 8 bits em um arquivo c de amostra usando o software abaixo.
Passo 4: Copie as amostras criadas no arquivo de cabeçalho pcm_sample e salve-o.
Em essência, o que estamos fazendo aqui é pegar uma amostra de som e então amostrá-la para criar amostras finitas (8000) de 8 bits cada. Essas amostras são armazenadas no flash usando o comando PROG_MEM (devido ao uso da biblioteca avr/pgmspace). Essas amostras agirão como o ciclo de trabalho para o PWM que será gerado. Definimos o ciclo de trabalho inicial (valor no registro OCR1A) como 0. Depois disso, as amostras serão lidas continuamente do flash e serão gravadas no OCR1A. Finalmente, o alto-falante será conectado à saída do PWM (OC1A) e poderemos ouvir os sons.
Para utilizar o flash interno, utilizamos as seguintes funções:
1. const longo pcm_length=6800;
const unsigned char pcm_samples PROGMEM ={ insira amostras aqui };
Esta função é usada para criar o arquivo de cabeçalho “pcm_sample” que será usado posteriormente.
2. pgm_read_byte(&pcm_samples(amostra++));
Esta função é usada para ler byte após byte do arquivo de cabeçalho.
Conexões:
Para o FPGA:
1. Os 4 interruptores deslizantes SW0, SW1, SW2 e SW3 serão usados como entrada.

Fig. 3: Tabela listando conectores PMod
2. A seguir, para saída do FPGA, usaremos PMod JA. As conexões são:
A interrupção (O) está conectada ao JA1 “L15”
Linha de Transmissão “Z0” conectada a JA2 “K12”
Linha de Transmissão “Z1” conectada à JA3 “L17”
Linha de Transmissão “Z2” conectada ao JA4 “M15”
Linha de Transmissão “Z3” conectada à JA7 “K13”
Nota 1: Não podemos usar JA5, JA6, pois eles são predefinidos para serem usados como GND, VCC.
Nota2: Como o Spartan 3E funciona em 3,3V Logic e o Atmega16 em 5V Logic, precisamos conectar um Logic Shifter IC como 74LS245 para nivelar as linhas de transmissão antes de conectá-las à PORTA do microcontrolador.
Para o microcontrolador:
1. Primeiro conecte a interrupção ao PD2 (já que estamos usando INT0, pode ser qualquer coisa dependendo da sua escolha). Em seguida, conecte as linhas de transmissão aos pinos 0-3 de qualquer porta. Aqui, a Porta B é usada.
2. Conecte o alto-falante através de um filtro passa-baixa (resistor (1k) + capacitor (470uf) conectado ao GND) ao PD5 (saída OC1A-PWM).
Trabalhando:
Pode-se observar que assim que pressionamos um botão no FPGA, podemos ver a letra correspondente no LCD e ouvir o número de batidas no alto-falante.
Conclusão:
Este foi um experimento simples para mostrar o conceito de co-design de Hardware-Software. Embora este projeto por si só não explore todo o potencial deste conceito, é um bom começo para iniciantes que podem aprender com ele e usá-lo em seus próprios projetos.
Diagramas de pinos:

Fig. 4: Imagem do interruptor de 4 slides na placa FPGA
74LS245
Código fonte do projeto
###
// Programa para usar interrupções externas (hardware) do microcontrolador AVR (ATmega16)








Dúvidas relacionadas a este artigo?
 Pergunte e discuta nos fóruns Electro-Tech-Online.com e EDAboard.com.
Pergunte e discuta nos fóruns Electro-Tech-Online.com e EDAboard.com.
Nos diga o que você acha!! Cancelar resposta
Você precisa estar logado para postar um comentário.