
Robôs de coordenadas cilíndricas são robôs cujos eixos formam um sistema de coordenadas cilíndricas. Usado para
-operações de montagem,
-manuseio em máquinas-ferramentas,
– soldagem por pontos e
-manuseio em máquinas de fundição sob pressão.
O movimento do braço principal é para cima e para baixo. O robô pode realizar esse movimento estendendo um cilindro embutido no braço. Na maioria dos robôs cilíndricos, o movimento para cima e para baixo é fornecido por um cilindro pneumático e a rotação geralmente é fornecida por um motor e engrenagens.
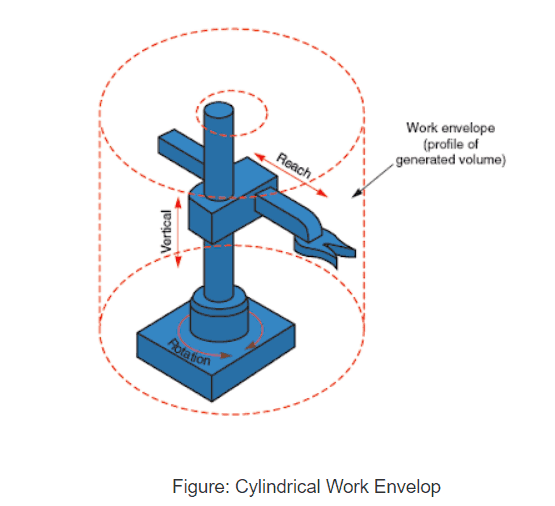 envelope de trabalho cilíndrico
envelope de trabalho cilíndricoConstrução de robô cilíndrico:
- consiste em duas corrediças ortogonais, colocadas em um ângulo de 90°, montadas em um eixo rotativo
• O alcance é alcançado à medida que o braço do robô se move para dentro e para fora.
• Para movimento vertical, o carro se move para cima e para baixo em um poste estacionário, ou o poste pode se mover para cima e para baixo na base do robô.
• O movimento ao longo dos três eixos traça pontos em um cilindro
• Uma configuração cilíndrica geralmente resulta em um envelope de trabalho maior do que uma configuração cartesiana.
Sistema de Coordenadas Cilíndricas
Um sistema de coordenadas cilíndricas é um sistema de coordenadas tridimensional que especifica posições de pontos pela distância de um eixo de referência escolhido, a direção do eixo em relação a uma direção de referência escolhida e a distância de um plano de referência escolhido perpendicular ao eixo. A última distância é dada como um número positivo ou negativo, dependendo de qual lado do plano de referência está voltado para o ponto.
A origem do sistema é o ponto onde todas as três coordenadas podem ser dadas como zero. Esta é a interseção entre o plano de referência e o eixo.
O eixo é também denominado eixo cilíndrico ou longitudinal, para diferenciá-lo do eixo polar, que é o raio que se encontra no plano de referência, começando na origem e apontando na direção de referência.
A distância do eixo pode ser chamada de distância radial ou raio, enquanto a coordenada angular é às vezes chamada de posição angular ou azimute. O raio e o azimute são chamados juntos de coordenadas polares, pois correspondem a um sistema de coordenadas polares bidimensional no plano que passa pelo ponto, paralelo ao plano de referência. A terceira coordenada pode ser chamada de altura ou altitude (se o plano de referência for considerado horizontal), posição longitudinal ou posição axial.
Entretanto, configurações cilíndricas têm algumas desvantagens.
– Sua rigidez mecânica geral é reduzida porque os robôs com eixo rotativo devem superar a inércia do objeto durante a rotação.
– Sua repetibilidade e precisão também são reduzidas na direção do movimento rotativo.
– A configuração cilíndrica requer um sistema de controle mais sofisticado do que a configuração cartesiana.
Aplicação de configurações cilíndricas
As aplicações típicas para configurações cilíndricas incluem o seguinte:
• Carregamento e descarregamento de máquinas
• Fundição de investimento
• Transferências de paletes transportadores
• Aplicações de fundição e forjamento
• Manuseio geral de materiais e manuseio e manipulação de carga útil especial
• Embalagem de carne
• Aplicações de revestimento
• Conjunto
• Moldagem por injeção
• Fundição sob pressão







