
A energia solar está ganhando rapidamente notoriedade como um meio importante de expansão dos recursos energéticos renováveis. Como tal, é vital que os profissionais da área da engenharia compreendam as tecnologias associadas a esta área. Nosso projeto incluirá a concepção e construção de um sistema de rastreamento de painel solar baseado em microcontrolador. O rastreamento solar permite que mais energia seja produzida porque o painel solar é capaz de permanecer alinhado ao sol. Este sistema baseia-se nos tópicos aprendidos neste curso. Um sistema funcional será finalmente demonstrado para validar o projeto. Problemas e possíveis melhorias também serão apresentados.
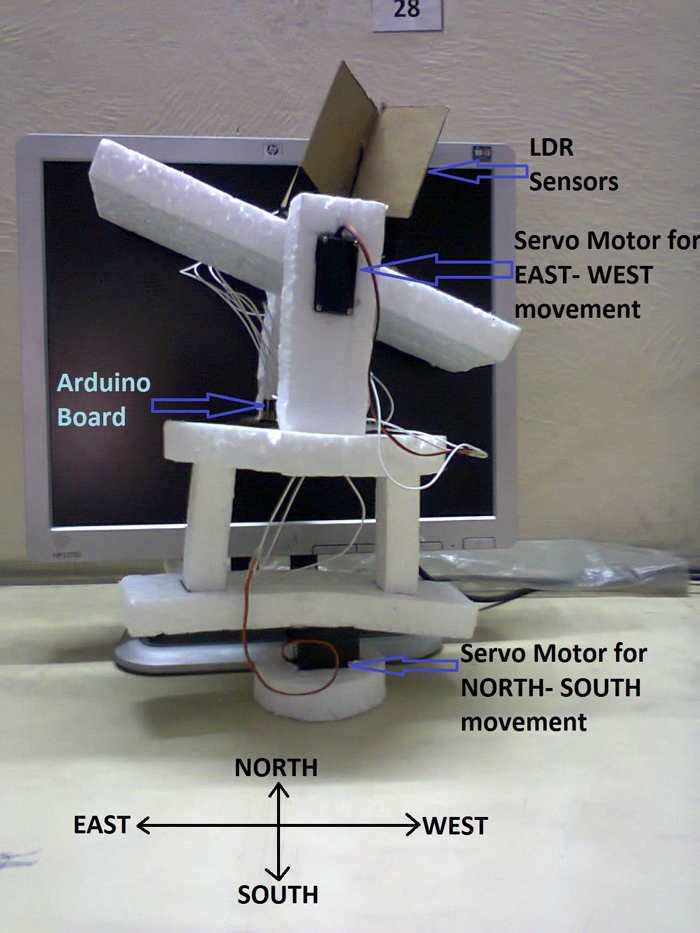
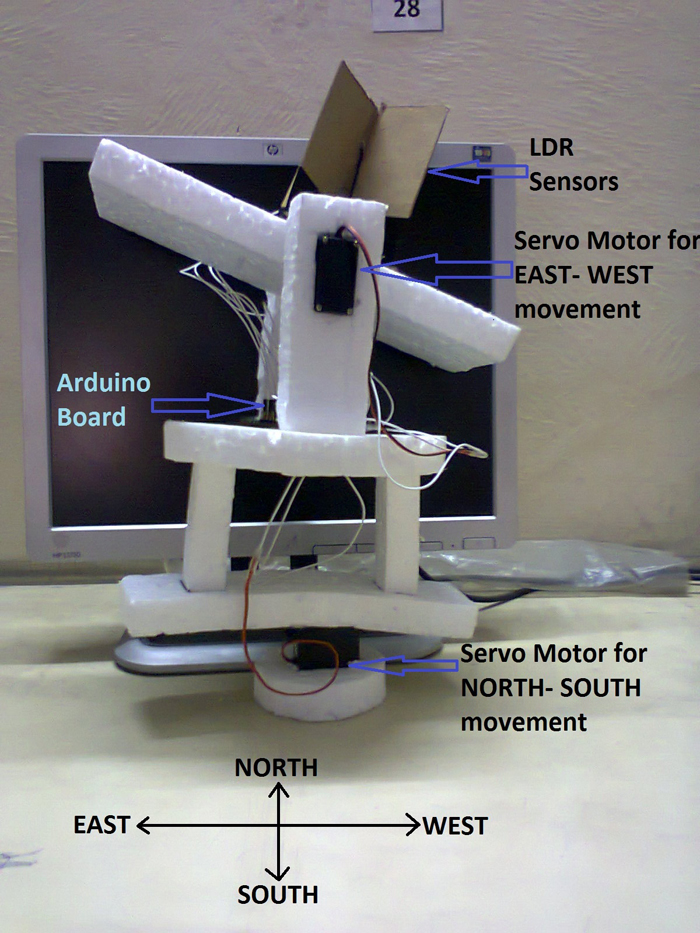
Configuração final do rastreador solar baseado em Arduino
OBJETIVO DO PROJETO
O objetivo disto projeto de rastreador solar é manter o painel solar fotovoltaico perpendicular ao sol durante todo o ano para torná-lo mais eficiente. O painel solar fotovoltaico de eixo duplo toma dados astronômicos como referência e o sistema de rastreamento tem a capacidade de apontar sempre o painel solar em direção ao sol e pode ser instalado em diversas regiões com pequenas modificações. O movimento vertical e horizontal do painel é obtido tomando como referência o ângulo de altitude e o ângulo de azimute. O controlador fuzzy tem sido usado para controlar a posição de motores CC. O controle de simulação matemática do sistema de rastreamento solar de eixo duplo garante o movimento ponto a ponto dos motores DC enquanto rastreia o sol.
Solar Tracker é um dispositivo que segue o movimento do sol enquanto ele gira de leste para oeste todos os dias. A principal função de todos os sistemas de rastreamento é fornecer um ou dois graus de liberdade de movimento. Os rastreadores são usados para manter os coletores solares/painéis solares orientados diretamente para o sol enquanto ele se move pelo céu todos os dias. O uso de rastreadores solares aumenta a quantidade de energia solar que é recebida pelo coletor de energia solar e melhora a produção de energia do calor/eletricidade que é gerada. Os rastreadores solares podem aumentar a produção de painéis solares em 20-30%, o que melhora a economia do projeto do painel solar.
NECESSIDADE DE RASTREADOR SOLAR
A energia fornecida pelo feixe direto diminui com o cosseno do ângulo entre a luz que entra e o painel. A mesa não. 2.1 mostra o
Potência direta perdida (%) devido ao desalinhamento (ângulo eu).
Tabela: Potência direta perdida (%) devido ao desalinhamento (ângulo eu)
|
Desalinhamento (ângulo eu ) |
Potência direta perdida (%)=1-cos(i) |
|
|
|
|
00 |
0 |
|
|
|
|
10 |
0,015 |
|
|
|
|
30 |
.14 |
|
|
|
|
80 |
1 |
|
|
|
|
23.40 |
8.3 |
|
|
|
|
300 |
13.4 |
|
|
|
|
450 |
30 |
|
|
|
|
750 |
>75 |
|
|
|
O sol viaja 360 graus leste-oeste por dia, mas da perspectiva de qualquer local fixo a porção visível é de 180 graus durante um período de meio dia. Os efeitos do horizonte local reduzem um pouco isso, fazendo com que o movimento efetivo seja de cerca de 150 graus. Um painel solar com orientação fixa entre os extremos do amanhecer e do pôr do sol verá um movimento de 75 graus em ambos os lados e, portanto, de acordo com a tabela acima, perderá 75% da energia pela manhã e à noite. Girar os painéis para leste e oeste pode ajudar a recuperar essas perdas. Um rastreador girando na direção leste-oeste é conhecido como rastreador de eixo único.
O sol também se move 46 graus norte-sul durante o período de um ano. O mesmo conjunto de painéis colocados no ponto médio entre os dois extremos locais verá o Sol mover-se 23 graus em cada lado, causando perdas de 8,3%. Um rastreador que contabiliza os movimentos diários e sazonais é conhecido como rastreador de eixo duplo .Design de rastreador
PROJETO DO RASTREADOR
Um rastreador solar é um dispositivo que orienta o conjunto fotovoltaico em direção ao sol. Em aplicações fotovoltaicas de tela plana (PV), rastreadores são usados para minimizar o ângulo de incidência entre a luz que entra e um painel fotovoltaico. Isso aumenta a quantidade de energia produzida pelo conjunto fotovoltaico.
Aqui podemos usar rastreadores de eixo duplo de altitude e azimute (AADAT). Os rastreadores de eixo duplo extraem os níveis máximos de energia solar devido à sua capacidade de seguir o sol vertical e horizontalmente. Não importa onde o sol esteja no céu, os rastreadores de eixo duplo são capazes de se posicionar na direção do sol.
A configuração de um painel solar quadrado tem dois graus de liberdade. Aqui, dois motores DC são usados para acionar os dois graus de liberdade rotacional. Os motores podem ser montados diretamente nos pinos de rotação das juntas rotacionais para reduzir perdas causadas por ligações e juntas e evitar o uso de mais ligações e mecanismos
MOTOR DC E MOTORISTA
Os sistemas de rastreamento precisariam consistir em dois motores, que controlam a posição da matriz, e um circuito de controle (analógico ou digital) para direcionar esses motores. As seções a seguir discutem alguns possíveis tipos de motores que podem ser usados para este tipo de aplicação.
MODELO MATEMÁTICO
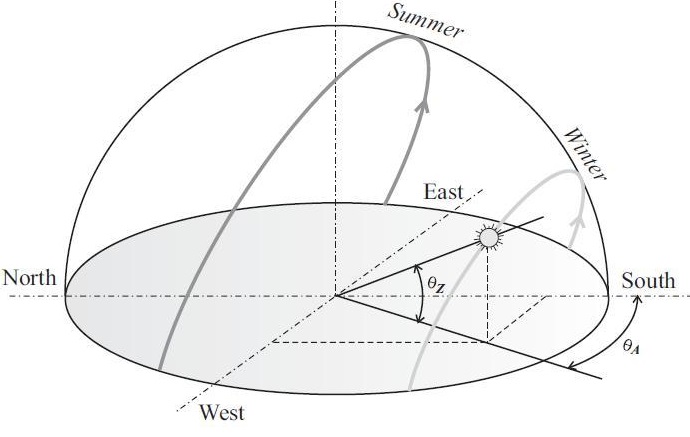
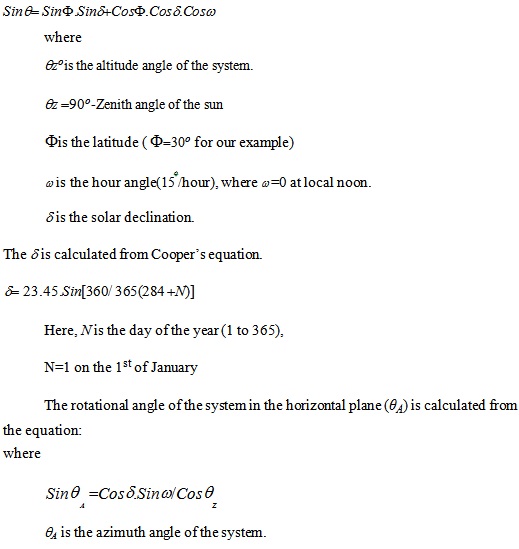
A fig. 3.3 mostra um comportamento típico da trajetória do Sol em dezembro (inverno) e junho (verão). O ângulo de rotação do sistema de orientação no plano vertical pode ser calculado a partir da seguinte equação:
Fig. 3.3 Comportamento típico da trajetória do Sol em dezembro (inverno) e junho (verão).).
 Projeto de sistema
Projeto de sistema
PROJETO DE SISTEMA
O objetivo de um rastreador solar é determinar com precisão a posição do sol. Isso permite que os painéis solares façam interface com o rastreador para obter a radiação solar máxima. Com este rastreador solar específico foi feito um sistema de circuito fechado.
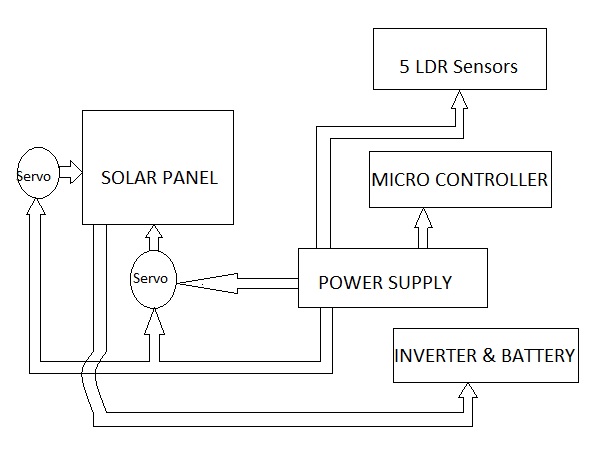
Diagrama de blocos do sistema geral
O sistema elétrico consiste em cinco sensores LDR que fornecem feedback a um microcontrolador. Este microcontrolador processa a entrada do sensor e fornece dois sinais PWM para a movimentação dos servomotores.
Este servo motor move o painel solar em direção à maior densidade de luz solar. Todo o sistema elétrico é alimentado por uma fonte de alimentação de 12 volts.
Inicialmente cinco valores analógicos diferentes são obtidos dos LDRs e depois são alimentados no microcontrolador. O microcontrolador fornece dois sinais PWM diferentes para o movimento do painel solar através do servo motor.Sensores
SENSORES

Estamos usando cinco resistores dependentes de luz como sensor. Eles sentem a área de maior densidade da luz solar. O painel solar se move para a área de alta densidade luminosa por meio de servomotores.
Cada LDR está conectado à fonte de alimentação formando um divisor de potencial. Assim, qualquer mudança na densidade da luz é proporcional à mudança na tensão nos LDRs.
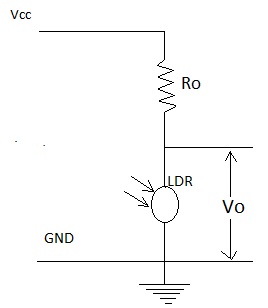
LDR é um transdutor passivo, portanto usaremos um circuito divisor de potencial para obter valor de tensão correspondente da resistência do LDR.
A resistência dos LDRs é inversamente proporcional à intensidade da luz que incide sobre ele, ou seja Quanto maior a intensidade ou brilho da luz, menor a resistência e vice-versa.
Interfaces:
Entrada (ADC):
O Arduino possui um conversor analógico para digital (ADC) embutido de 10 bits, portanto pode fornecer valores digitais de 0 a 1023 (desde 2 ^ 10 = 1024). Também podemos definir a tensão de referência do ADC no Arduino, mas aqui vamos deixá-la usar o valor padrão. O LDR tem dois pinos e, para obter o valor da tensão, usamos o circuito divisor de potencial. turn é uma função da luz incidindo no LDR. Quanto maior a intensidade da luz, menor a resistência do LDR e, portanto, menor a tensão de saída (Vout). E menor a intensidade da luz, maior a resistência do LDR e, portanto, maior o Vout.
Saída (PWM):
O Arduino possui um gerador PWM de 8 bits, então podemos obter até 256 Sinal PWM. Para acionar um servo, precisamos obter um sinal PWM da placa, isso geralmente é feito usando a função de temporizador do microcontrolador, mas o Arduino torna isso muito fácil. O Arduino fornece uma biblioteca de servo na qual temos que atribuir apenas o ângulo do servo (0-1800) e o o servo gira nesse ângulo, todos os cálculos PWM são tratados pela biblioteca servo e obtemos um sinal PWM limpo de acordo com o ângulo desejado.
PLACA ARDUINO SEVERINO:
 Arquivo PCB
Arquivo PCB
Projeto final
Código-fonte do projeto
###
# incluir
###
Diagramas de circuito
| Cópia esquemática do Solar-Tracker | 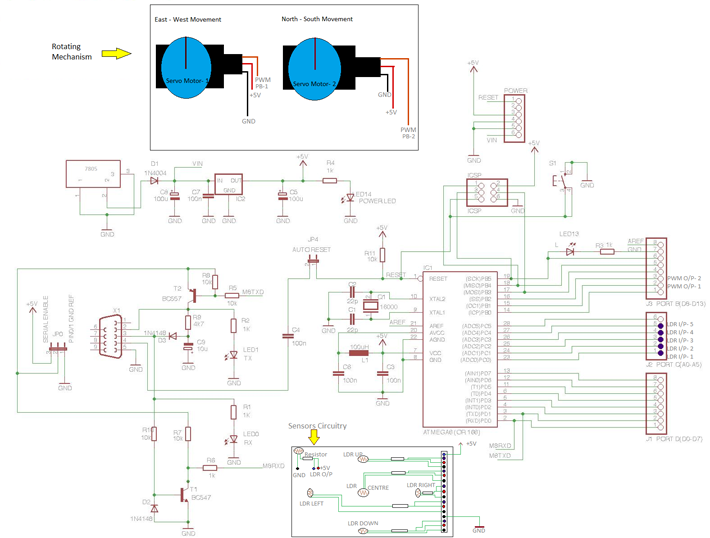 |







