

Figura 1. Motor drone
O motor elétrico, o controlador eletrônico de velocidade e o controlador de vôo são os três componentes principais que constituem o sistema de propulsão de qualquer drone. Agora é bastante comum obter uma combinação controlador de vôo-ESC para a construção de drones FPV, tornando a seleção de motores elétricos muitas vezes um assunto independente. Porém, é realmente necessário ter uma combinação compatível de todos os três componentes – motores elétricos, controlador de vôo e ESC para obter o desempenho desejado do drone. Uma combinação compatível de todos os três componentes principais é obtida automaticamente quando eles são selecionados de acordo com critérios específicos de tamanho e peso do drone.
Agora é comum que fabricantes e entusiastas de eletrônicos tentem construir drones FPV. Com os avanços na tecnologia de baterias e outros componentes eletrônicos de drones, é muito mais fácil construir um drone agora do que nunca. Primeiro, o fabricante deve decidir o tamanho do drone. O tamanho do drone pode ser estimado calculando o peso esperado do drone. O peso do drone é calculado somando o peso de todos os componentes e acessórios a serem montados como em um drone. Alternativamente, o tamanho de um drone poderia ser decidido e selecionado de acordo com os outros componentes compatíveis dentro de uma restrição de peso estimada.
De qualquer forma, com o tamanho do drone selecionado, o fabricante pode se concentrar na estrutura do drone. Como a estrutura do drone e o tamanho da hélice estão relacionados, o tamanho apropriado da hélice pode ser calculado a partir do tamanho do drone. O comprimento diagonal da estrutura do drone deve ser pelo menos 3 vezes o tamanho das hélices. De acordo com o tamanho e o peso da hélice, o impulso de elevação e a velocidade do drone são calculados. Esses fatores são mais importantes na seleção de motores drone. Embora existam várias outras especificações que devem ser consideradas e cuidadas ao finalizar os motores do drone. Neste artigo, daremos uma olhada em todos os fatores que devem ser considerados antes de comprar um conjunto de motores drone. Vamos começar.
Como funcionam os motores dos drones?
Os drones podem ser construídos usando motores com ou sem escovas. Os motores escovados são geralmente usados apenas em drones de brinquedo e mini-drones. Todos os drones comerciais usam motores sem escova. Os motores sem escova também são comuns em projetos de drones DIY; eles são preferidos devido ao mínimo atrito e perda de energia no motor. Seja um motor sem escova ou com escova, o funcionamento de ambos os tipos é baseado no mesmo princípio do eletromagnetismo. Em ambos os tipos, são utilizados eletroímãs e ímãs permanentes. Quando os eletroímãs são carregados por corrente, forma-se um campo magnético temporário, que interage com o campo magnético dos ímãs permanentes. As forças repulsivas e atrativas entre os ímãs permanentes e os eletroímãs fazem com que o eixo do motor gire.
Motores sem escova vs. motores escovados
A primeira coisa a considerar é selecionar entre motores com e sem escova. Os motores escovados são adequados apenas para drones pequenos. Esses motores não são muito eficientes em termos energéticos. Hoje em dia, para todos os tipos de drones, os motores sem escova são os preferidos. Os motores escovados são usados apenas onde o desempenho do drone pode ser comprometido para redução de custos, como no caso de drones de brinquedo. A menos que haja uma restrição orçamentária apertada, você deve usar motores sem escova para o seu projeto de drone.
Fatores-chave na seleção do motor
Depois de concluir a seleção do tipo de motor, você precisará avaliar as opções de compra disponíveis em vários fatores. Alguns dos fatores mais importantes a serem considerados incluem:
- Peso e estrutura do drone
- Requisito de impulso
- Tamanho do motor
- Padrão de montagem
- Classificação KV
- Classificações de corrente e tensão
- Pólos e ímãs
- Torque do motor
- KV vs. constante de torque
- Consequência
- Enrolamento do motor
Peso e estrutura do drone
A primeira coisa agora é calcular o peso do drone. Considere todos os componentes que farão ou serão anexados ao drone – a estrutura do drone, controlador de vôo, ESCs, motores, hélices, bateria, câmera, antena, etc. Você também deve levar em consideração 10 a 20% de peso extra (seria melhor superestimar do que subestimar). Com um peso estimado do drone, você pode determinar o tamanho do quadro. O tamanho do chassi fornecerá o tamanho máximo permitido da hélice. Idealmente, o tamanho máximo da hélice é um terço das dimensões do chassi.
Determinando requisitos de empuxo
Agora você tem um peso estimado do drone e selecionou um tamanho de quadro. Em seguida, você precisa decidir os requisitos de impulso do drone. O impulso máximo de todos os motores deve ser pelo menos o dobro do peso do drone. Se o peso do drone for de 1Kg, todos os motores devem produzir um empuxo de pelo menos 2Kg. Se for um quadricóptero, isso significa que cada motor deve produzir pelo menos um empuxo máximo de 500 gramas. Isto é quase essencial. Caso contrário, o drone não conseguirá se levantar no ar. Idealmente, para um drone normal, a relação impulso/peso deve ser de 3:1 ou 4:1. Esta é a proporção ideal para drones normais, onde o drone pode ser facilmente manobrado e também tem capacidade para transportar cargas extras.
A relação impulso-peso ideal é diferente para diferentes tipos de drones. Para drones normais, a proporção deve ser 3:1 ou 4:1. Para drones de estilo livre, a proporção desejada é 5:1. Para drones de corrida, a proporção de 10:1 e 14:1 é preferida. Quanto maior a relação empuxo-peso do drone, mais difícil será para o piloto manobrá-lo. Um drone com alta relação impulso-peso pode saltar mesmo com um leve toque no acelerador.
Tamanho do motor
Como já mencionado, um motor drone, com ou sem escova, consiste em eletroímãs e ímãs permanentes. Os eletroímãs estão presentes na forma de bobinas metálicas. Essas bobinas metálicas formam o estator do motor. O fio da bobina é esmaltado para isolamento e evitando curto-circuito. As bobinas são enroladas em postes com uma camada de isolamento extremamente fina entre eles. Os postes são constituídos por finas placas de metal laminadas. Quando a corrente flui através de bobinas metálicas, é gerado um campo magnético temporário, que interage com o campo magnético dos ímãs permanentes causando rotação.
Os ímãs permanentes são fixados na parte interna da campainha do motor. A campainha do motor atua como uma caixa protetora para os ímãs permanentes e também para as bobinas de metal. O eixo do motor está conectado à campainha do motor. Quando a mudança nos campos magnéticos causa rotação, o eixo transfere o torque do motor para as hélices.
O tamanho de um motor é determinado pela largura e altura do estator. Isto é indicado no motor por quatro números – XXYY, onde XX indica a largura ou diâmetro do estator em mm e YY indica a altura do estator em mm. Quanto maior o tamanho do motor, maior será o torque gerado por ele e maior empuxo será produzido. Com o aumento do tamanho do motor, entretanto, sua capacidade de resposta é reduzida. Além disso, motores grandes são mais pesados que motores menores. O tamanho do motor deve ser determinado de acordo com o requisito máximo de empuxo de cada motor em um multicóptero. Como você já deve ter determinado a relação empuxo/peso necessária, você deve ter derivado o empuxo máximo exigido de cada motor. Agora, você precisará listar os motores que atendem ao requisito de empuxo desejado e selecionar os menores motores que atendem ao requisito de empuxo fornecido.
Motores mais largos vs. mais altos
Motores BLDC de diversos tamanhos atenderão aos requisitos de empuxo desejados. Alguns desses motores terão estatores mais largos, enquanto outros terão estatores mais altos. Motores com estator largo apresentam maior inércia. Motores mais largos necessitam de mais energia para alterar a velocidade de rotação. Como resultado, esses motores respondem menos. Motores mais largos, entretanto, possuem maior área de superfície, permitindo melhor resfriamento. O estator mais largo também permite que rolamentos maiores se encaixem, melhorando a durabilidade, eficiência e estabilidade do motor.
Por outro lado, motores estreitos respondem melhor, mas podem não ter um resfriamento tão eficaz. Para decidir entre motores mais largos ou mais altos, deve-se considerar o caso de uso do drone. Para drones que precisam levantar cargas úteis, a capacidade de resposta pode ser um pouco comprometida em vez de um melhor resfriamento. Portanto, motores mais largos devem ser preferidos neste caso. Os drones que transportam cargas precisam ser pilotados com cuidado, portanto, menos capacidade de resposta é de fato preferível em tais projetos de drones. Por outro lado, um drone de corrida deve ser o mais responsivo possível. Para um drone de corrida, um motor mais alto é adequado. No geral, como você pretende manobrar o drone, ou seja, lento ou rápido, e se o drone precisa levantar cargas úteis ou não, serão os fatores decisivos para a seleção de motores mais largos ou mais altos.
Classificação KV
Em seguida, você precisa procurar a classificação KV do motor. A classificação KV é o número de rotações do motor por minuto quando um volt é aplicado ao motor sem carga. Se um motor drone tiver uma classificação KV de 920 e for alimentado por uma bateria LiPo 3S, ou seja, uma bateria de 12,6 V, ele girará a 11.592 RPM sem uma hélice montada nele. Motores com classificações KV mais altas têm enrolamentos mais curtos e baixa resistência interna. Como resultado, esses motores tendem a aquecer precocemente. O aquecimento é óbvio, pois a maioria dos motores mais altos tem classificações KV mais altas. Os motores com alta classificação KV giram em velocidades maiores e produzem mais empuxo.
É uma norma combinar motores de alto KV com hélices mais leves e motores de baixo KV com hélices mais pesadas. Se um motor de alta classificação KV for combinado com uma hélice pesada, o motor tentará girar a hélice na velocidade máxima. Devido à hélice pesada, será necessário mais torque e o motor consumirá mais corrente. É possível que muita corrente consumida pelo motor possa danificar o ESC ou os MOSFETs nele contidos. Da mesma forma, se um motor de baixa potência KV for combinado com uma hélice mais leve, ele poderá não ser capaz de produzir empuxo suficiente.
Se você já concluiu o uso de motores mais largos considerando boa manobrabilidade em velocidades lentas, um motor de baixa classificação KV em combinação com hélices mais pesadas deve ser selecionado. Se o seu drone for projetado para voar sem qualquer necessidade de transportar carga útil, selecione um motor mais alto com uma classificação KV alta em combinação com hélices mais leves.
Deve-se notar que a classificação KV é apenas uma estimativa aproximada da rotação do motor feita pelos fabricantes de motores. O motor pode girar em RPM mais baixas devido à resistência do ar; a classificação KV é uma rotação estimada do motor para o motor não montado com a hélice. Quer um motor de baixa classificação KV seja combinado com uma hélice mais pesada ou um motor de alta classificação KV combinado com uma hélice mais leve, a combinação deve produzir a relação empuxo-peso desejada.
Torque do motor
O torque gerado por um motor depende do volume do estator, dos tipos de ímãs permanentes usados no motor, da qualidade das bobinas metálicas, da construção do motor (como número de pólos e folga de isolamento), etc. um motor, mais pesado ele será. Desde que existam dois motores com o mesmo volume de estator, deve-se dar preferência ao motor mais leve. Quanto maior o torque de um motor, mais responsivo ele será às instruções do piloto. Muito torque ou empuxo, entretanto, pode causar movimentos bruscos ao drone, dificultando o controle do piloto. Esses movimentos bruscos são acompanhados por picos de tensão ou corrente no motor, que podem danificar a unidade ESC. Para um determinado torque ou empuxo, sempre deve ser selecionado um motor mais leve. Os motores com menor torque e menor RPM devem ser usados onde o drone precisa voar lenta e suavemente carregando uma carga útil.
KV vs. constante de torque
A constante de torque de um motor drone é a quantidade de corrente consumida pelo motor para produzir determinado torque. A constante de torque e a classificação KV de um motor não estão teoricamente relacionadas. Ainda assim, observa-se que motores de alta classificação KV possuem uma constante de torque alta, e motores de baixa classificação KV possuem uma constante de torque baixa. Isso significa que um motor de alta classificação KV consome mais corrente para produzir a mesma quantidade de torque em comparação com um motor de baixa classificação KV. Devido ao alto consumo de corrente, a eficiência energética é afetada. É por isso que os motores de alta classificação KV acabam sendo menos eficientes em termos de energia em comparação com os motores de baixa classificação KV. Para garantir a eficiência energética, é importante escolher uma classificação KV ideal, de modo que a constante de torque não seja muito alta para impactar a eficiência. Um motor com uma constante de torque exagerada pode danificar o ESC e causar problemas de aquecimento no motor. Com esse motor, a vida útil da bateria é reduzida e pode haver mais desgaste nos fios, no motor e nos MOSFETs.
Tensão atual e eficiência
As classificações de tensão e corrente são importantes na seleção de um motor BLDC para drone. Quanto maior a tensão do motor, mais corrente ele tende a consumir da bateria. Você deve calcular a corrente máxima consumida pelo motor quando ele opera na tensão mais alta e gera empuxo máximo. A corrente nominal do ESC deve ser superior à corrente máxima consumida pelo motor. A classificação de corrente contínua do ESC pode não precisar ser maior que a corrente máxima consumida pelo motor. Mas para garantir uma operação confiável e segura, a corrente nominal de ruptura deve ser maior que a corrente máxima do motor. Mesmo que a classificação de corrente contínua esteja no lado mais alto, isso é melhor.
N&P no motor
Os motores drone são marcados com classificações N&P como 12N15P, que indica o número de eletroímãs ou pólos no estator do motor e o número de ímãs permanentes. Um motor com menos pólos tem maior saída de torque, enquanto um motor com mais pólos tem operação mais suave devido à distribuição uniforme do campo magnético. Como os motores drone são trifásicos, o número de pólos é sempre múltiplo de 3. Para motores BLDC tamanho 22XX e 23XX, a configuração 12N15P é a mais comum. O número de pólos e ímãs não impacta diretamente no desempenho do motor. Pode, no entanto, ser necessário saber o número de pólos e ímãs nos motores para definir certas configurações nos controladores de vôo, como habilitar filtros RPM.
Padrão de montagem
Os motores drone dos tamanhos 22XX, 23XX e 24XX possuem um padrão de montagem de 16x16mm ou 16x19mm. Uma estrutura de drone deve suportar ambos os padrões. Esses motores são fixados com parafusos M3. O comprimento dos parafusos deve ser 2 mm maior que a espessura do braço do drone. Por exemplo, se o braço do drone tiver 5 mm de espessura, os parafusos M3 para montagem dos motores devem ter 7 mm de comprimento.
Enrolamento do motor
Assim como o número de pólos em um motor afeta a saída de torque e a suavidade do motor, o enrolamento do motor ou as voltas em torno de um pólo também afetam o desempenho do motor. O enrolamento do motor está relacionado à capacidade de corrente e à saída de torque do motor. Se o motor usar fio grosso para enrolar, ele será capaz de suportar uma corrente maior através dele. Devido ao fio grosso, é menos provável que a resistência interna do fio resulte em uma classificação de KV alta. Enrolar o fio de cobre grosso, entretanto, reduz o campo eletromagnético do estator, resultando em menor torque.
Por outro lado, se um fio fino for usado para enrolamento, sua tolerância ao consumo de corrente elevada é reduzida. O enrolamento produz um bom campo eletromagnético resultando em alto torque, mas devido à alta resistência interna do fio fino, a classificação KV é reduzida.
Os fabricantes de motores lidam com esse dilema de torque versus classificação KV aumentando o número de enrolamentos enquanto usam fios de cobre grossos. O fio grosso garante que o motor possa suportar alto consumo de corrente, e o maior número de enrolamentos melhora o campo eletromagnético do estator, resultando em maior torque.
Na verdade, os enrolamentos do motor vêm em duas opções – fio simples e fio múltiplo. O enrolamento do motor de cadeia simples consiste em um fio de cobre grosso com um número menor de voltas ao redor do pólo. Devido à grande lacuna entre os fios grossos, o número de voltas é obviamente limitado. Esses motores podem lidar com grande consumo de corrente e podem funcionar com baterias de grande tensão, como 6S.
O enrolamento multifilamentar do motor possui o mesmo fio grosso dividido em três fios mais finos. Esses motores produzem fortes campos eletromagnéticos e oferecem alto torque. Embora o grande consumo de corrente possa danificar o enrolamento ou fazê-lo quebrar. A classificação KV para enrolamentos de motor multifilamentos é obviamente mais baixa.
Rolamento do motor
O rolamento do motor tem impacto direto na durabilidade e suavidade do motor. O tamanho do rolamento é determinado pela diferença entre o diâmetro interno e o diâmetro externo do motor. Os motores que possuem rolamentos grandes são mais duráveis. Os motores que possuem rolamentos pequenos são mais estáveis e de operação mais suave. O tamanho do eixo do motor é determinado pelo diâmetro interno do rolamento. Muitos fabricantes de motores comercializam seus motores com rolamentos de cerâmica em vez de rolamentos de aço. O rolamento de cerâmica é mais liso, mas pode quebrar.
Movimentos motores
Os motores do drone são girados em direções opostas para estabilizar o drone no ar. Se todos os motores girassem na mesma direção, seria muito difícil para o drone se levantar no ar e manter a orientação adequada. É por isso que alguns motores giram no sentido horário, enquanto outros giram no sentido anti-horário. Os motores montados diagonalmente opostos entre si giram sempre em sentidos opostos, ou seja, um motor gira no sentido horário e o outro gira no sentido anti-horário. Figura 2 demonstra padrões comuns de rotação do motor para diferentes multicópteros.
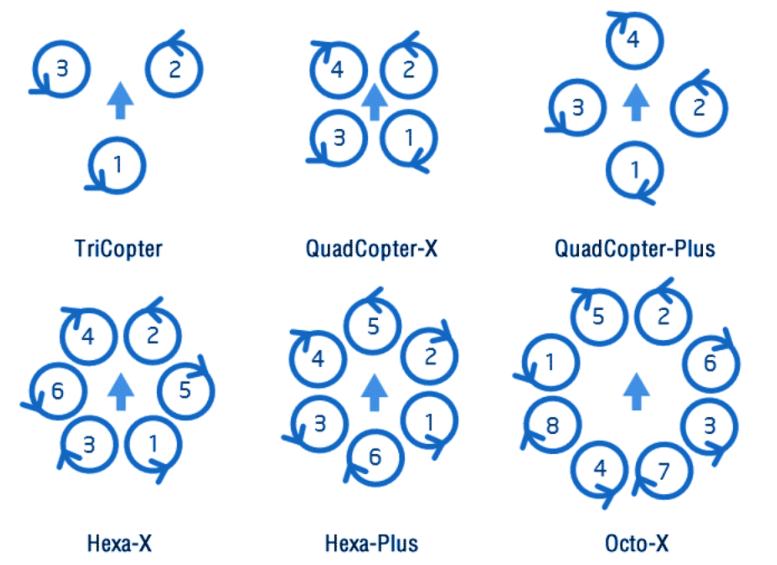
Figura 2. Sentidos de rotação do motor do drone em diferentes multicópteros.
Conexões do motor
Os motores do drone podem ser girados no sentido horário ou anti-horário. Os motores DC escovados possuem apenas dois fios. Os motores DC sem escova possuem três fios. Esses fios se conectam ao ESC. Quando conectado de uma maneira, o motor gira no sentido horário ou anti-horário. Para inverter o sentido de rotação, quaisquer duas conexões com o ESC podem ser trocadas. O sentido de rotação dos motores também pode ser alterado pelo controlador de vôo.
Conclusão
Existem vários fatores que devem ser considerados ao selecionar um motor BLDC para um drone. Primeiro, você precisa decidir o peso e o tamanho da estrutura do drone. A partir daí, você obtém o impulso necessário do motor. De acordo com o requisito de empuxo, você pode selecionar um tamanho de motor. Dependendo da natureza desejada do voo, ou seja, se o drone deve voar devagar e suavemente carregando uma carga útil ou deve voar rápido e responsivo sem carga útil, você pode decidir sobre a natureza do motor – mais largo ou mais alto, classificação KV, torque e torque constante. O consumo máximo de corrente e a classificação de tensão do motor do drone podem então ser usados para determinar um ESC adequado para o drone. Além desses fatores, outras especificações como número de pólos, tipo de enrolamento do motor, rolamento e padrão de montagem podem ser consideradas para refinar ainda mais o desempenho do motor. Os motores são conectados em um drone para girar no sentido horário e anti-horário. Os pares de motores diagonalmente opostos giram em direções opostas para manter o vôo do drone estável no ar. A direção e a rotação dos motores também podem ser alteradas pelo controlador de vôo. tabela 1 resume as especificações esperadas de um motor drone de acordo com o desempenho desejado do drone.

Tabela 1.
mesa 2 fornece uma estimativa aproximada do tamanho adequado da hélice, tamanho do motor e classificação KV de acordo com o tamanho do chassi.
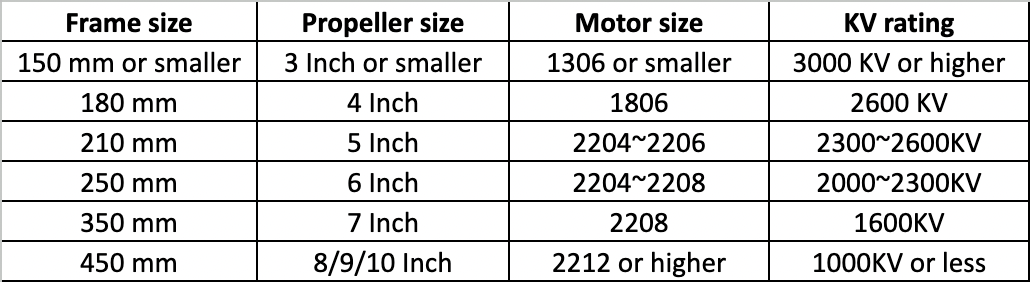
Mesa 2.