
EU. Diferenças de vários motores
1. Diferenças entre motores CC e CA

Diagrama esquemático do motor DC

Diagrama esquemático do motor AC
Tal como o próprio nome indica, um motor DC utiliza corrente contínua (DC) como fonte de energia, enquanto um motor AC utiliza corrente alternada (AC) como fonte de energia.
Em termos de estrutura, o princípio de um motor DC é relativamente simples, mas a sua estrutura é complexa e difícil de manter. Por outro lado, o princípio de funcionamento de um motor CA é complexo, mas a sua estrutura é relativamente simples e mais fácil de manter em comparação com um motor CC.
Em termos de preço, os motores CC com a mesma potência são normalmente mais caros que os motores CA. Além disso, o custo de um motor DC é maior se você incluir um dispositivo regulador de velocidade para controlar sua velocidade.
Em termos de desempenho, a velocidade de um motor DC é estável e o controle de velocidade é preciso, o que não pode ser alcançado por um motor AC. No entanto, os motores CC são usados apenas como substitutos dos motores CA sob rígidos requisitos de velocidade.
Embora a regulação de velocidade de um motor CA seja mais complexa, ela é amplamente utilizada devido ao uso generalizado de energia CA em fábricas de produtos químicos.
2. Diferenças entre motores síncronos e assíncronos

Um motor síncrono é um tipo de motor onde a velocidade de rotação do rotor é igual à do estator. Por outro lado, um motor assíncrono é um tipo de motor onde a velocidade de rotação do rotor não é igual à do estator.
3. Diferenças entre motores comuns e de frequência variável
É evidente que os motores normais não podem ser utilizados como motores de frequência variável. Isso ocorre porque os motores normais são projetados para operar em frequência e tensão constantes, o que não atende totalmente aos requisitos de regulação de frequência para controle de velocidade. Portanto, não pode ser usado como motor de conversão de frequência.
O impacto do conversor de frequência no motor afeta principalmente sua eficiência e aumento de temperatura. O conversor de frequência gera vários graus de tensão e corrente harmônica durante a operação, fazendo com que o motor opere sob tensão e corrente não senoidal. Isso leva a um aumento no consumo de cobre do estator e do rotor, no consumo de ferro e em perdas adicionais no motor.
De todos os impactos, o mais significativo é o consumo de cobre do rotor, que faz com que o motor gere mais calor e reduz sua eficiência e potência de saída. Como resultado, o aumento de temperatura dos motores normais geralmente aumenta de 10% a 20%.

A faixa de frequência do conversor de frequência varia de vários quilohertz a mais de dez quilohertz, o que resulta em uma alta taxa de aumento de tensão no enrolamento do estator do motor. Isto equivale a aplicar uma tensão de impulso acentuada ao motor, submetendo o isolamento entre espiras do motor a um teste severo.
Quando um motor é alimentado por um conversor de frequência, a vibração e o ruído gerados por fatores eletromagnéticos, mecânicos, de ventilação e outros tornam-se mais complexos.
Os harmônicos presentes na fonte de alimentação de frequência variável interagem com os harmônicos espaciais inerentes da parte eletromagnética do motor, resultando em diversas forças de excitação eletromagnética e aumento de ruído.
A ampla faixa de frequência de trabalho e a grande faixa de variação de velocidade do motor tornam difícil evitar a frequência natural de vibração de cada parte estrutural, resultando em uma frequência de várias ondas de força eletromagnética.
Em baixas frequências de potência, a perda causada por harmônicos mais elevados na fonte de alimentação é substancial. Além disso, à medida que a velocidade do motor variável diminui, o volume de ar de resfriamento diminui proporcionalmente ao cubo da velocidade de rotação, levando a um aumento acentuado na temperatura do motor e à dificuldade em alcançar uma saída de torque constante.
Então, como distinguir entre motor comum e motor de frequência variável?
II. Diferenças estruturais entre motor comum e motor de frequência variável
1. Requisitos de classe de isolamento mais elevados
Normalmente, os motores de frequência variável têm uma classificação de isolamento F ou superior. Para aumentar a resistência do isolamento, é importante melhorar o isolamento da terra e o isolamento das espiras do fio, particularmente a sua capacidade de resistir à tensão de impulso.
2. Motores de frequência variável exigem maior vibração e ruído
Para motores de frequência variável, é importante considerar totalmente a rigidez dos componentes do motor e de todo o motor. Devem ser feitos esforços para melhorar a frequência natural do motor para evitar ressonância com quaisquer ondas de força.
3. O motor de frequência variável possui diferentes modos de resfriamento
O motor de frequência variável normalmente utiliza ventilação forçada para resfriamento, o que significa que o ventilador de resfriamento do motor principal é alimentado por um motor separado.
4. Diferentes requisitos para medidas de proteção
Para motores de frequência variável com capacidade superior a 160 kW, devem ser implementadas medidas para isolar os rolamentos.
Isto se deve à probabilidade de assimetria do circuito magnético e geração de corrente no eixo. Quando as correntes de alta frequência geradas por outros componentes se combinam, pode aumentar significativamente a corrente do eixo, causando danos aos rolamentos. Para evitar isto, geralmente são necessárias medidas de isolamento.
Para motor de frequência variável de potência constante
Quando a velocidade de rotação ultrapassa 3.000 rotações por minuto, é importante utilizar uma graxa especial com resistência a altas temperaturas para neutralizar o aumento da temperatura do rolamento.
5. Diferentes sistemas de refrigeração
A ventoinha de resfriamento do motor de frequência variável é alimentada por uma fonte de energia separada para garantir sua capacidade de resfriamento contínuo.
III. Seleção do Motor

Os conteúdos básicos necessários para a seleção do motor:
Tipo de carga, potência nominal, tensão nominal, velocidade nominal e outras condições acionadas.
1. Tipos de cargas acionadas
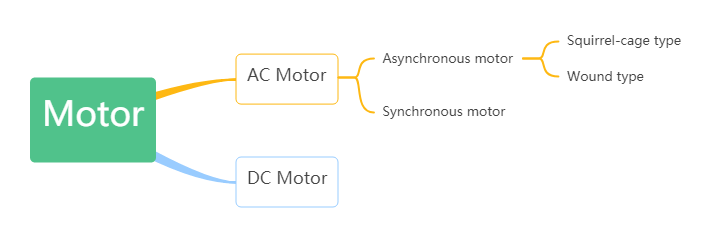
Isso deve ser abordado a partir das características dos motores, que podem ser simplesmente categorizados em motores de corrente contínua (CC) e motores de corrente alternada (CA), com os motores CA divididos em motores síncronos e assíncronos.
(1) Motores CC
A vantagem dos motores CC é a conveniência da regulação da velocidade através de ajustes de tensão, aliada à capacidade de fornecer torque considerável. Eles são adequados para cargas que exigem ajustes frequentes de velocidade, como laminadores em siderúrgicas e elevadores em minas.
No entanto, com o avanço da tecnologia de conversão de frequência, os motores CA também podem ajustar a velocidade alterando a frequência. Embora o custo de um motor de frequência variável não seja muito superior ao dos motores normais, o preço do inversor constitui uma parte significativa do custo total do equipamento. Assim, outra vantagem dos motores CC é a sua relação custo-benefício.
Uma desvantagem dos motores CC é a sua estrutura complexa, que inevitavelmente leva ao aumento das taxas de falhas. Os motores CC, em comparação com os motores CA, não apenas possuem enrolamentos mais complexos (enrolamentos de excitação, comutação, compensação e armadura), mas também incluem componentes adicionais como anéis coletores, escovas e comutadores.
Esses requisitos não exigem apenas alta precisão de fabricação, mas também resultam em custos de manutenção mais elevados no longo prazo.
Portanto, os motores CC estão em uma posição incômoda em aplicações industriais, perdendo gradualmente popularidade, mas ainda úteis durante a fase de transição. Caso o usuário possua recursos suficientes, recomenda-se a escolha de um motor CA com inversor, dados os diversos benefícios que os inversores oferecem.
(2) Motores Assíncronos
As vantagens dos motores assíncronos residem na sua estrutura simples, desempenho estável, fácil manutenção e baixo custo. Eles também têm o processo de fabricação mais simples. Como disse certa vez um antigo técnico de oficina, as horas de trabalho gastas na montagem de um motor CC poderiam completar aproximadamente dois motores síncronos ou quatro motores assíncronos de potência semelhante. Isto diz muito sobre o uso generalizado de motores assíncronos na indústria.
Os motores assíncronos são divididos em tipos de gaiola de esquilo e rotor enrolado, diferenciados por seus rotores. O rotor de um motor de gaiola de esquilo é feito de barras de metal, de cobre ou alumínio.
O alumínio é mais barato e, como a China é rica em bauxita, é amplamente utilizado onde as exigências não são altas.
No entanto, as propriedades mecânicas e elétricas do cobre são superiores às do alumínio, e a maioria dos rotores que encontrei são feitos de cobre. Os motores de gaiola de esquilo, uma vez resolvido o problema das barras quebradas, demonstram confiabilidade significativamente maior do que aqueles com rotores enrolados.
Uma desvantagem, entretanto, é que o torque gerado por um rotor metálico cortando linhas magnéticas em um campo rotativo do estator é relativamente pequeno e a corrente de partida é grande, dificultando o manuseio de cargas que exigem alto torque de partida.
Embora aumentar o comprimento do núcleo do motor possa gerar mais torque, o efeito é bastante limitado. Os motores de rotor enrolado, por outro lado, energizam o enrolamento do rotor através de anéis coletores na partida, criando um campo magnético do rotor. O movimento relativo resultante com o campo rotativo do estator produz um torque mais alto.
Durante a partida, a corrente de partida é reduzida pelo uso de resistores de água, cuja resistência é controlada por um dispositivo de controle eletrônico maduro que altera seu valor durante o processo de partida. Isto é adequado para cargas como laminadores e elevadores.
No entanto, como os motores assíncronos de rotor bobinado adicionam componentes como anéis coletores e resistores de água, o custo geral do equipamento é um pouco mais alto. Comparados aos motores CC, eles possuem uma faixa de ajuste de velocidade mais estreita e torque relativamente menor, portanto seu valor é menor.
No entanto, como os motores assíncronos estabelecem um campo magnético rotativo ao energizar o enrolamento do estator, que é um componente indutivo que não realiza trabalho, eles extraem energia reativa da rede, criando um impacto significativo.
Por exemplo, quando um grande aparelho indutivo é conectado à rede, a tensão da rede cai e o brilho das luzes elétricas diminui abruptamente.
Portanto, as empresas de energia podem restringir o uso de motores assíncronos, o que muitas fábricas devem levar em consideração. Alguns grandes consumidores de electricidade, como as fábricas de aço e alumínio, optam por estabelecer as suas próprias centrais eléctricas, formando redes independentes, para aliviar estas restrições de utilização.
Assim, para que um motor assíncrono atenda às necessidades de cargas de alta potência, ele deve ser equipado com um dispositivo de compensação de potência reativa. Em contraste, os motores síncronos podem fornecer potência reativa à rede através de dispositivos de excitação. Quanto maior a potência, mais evidentes são as vantagens dos motores síncronos, criando assim um palco para sua utilização.
(3) Motores Síncronos
Além de compensar a potência reativa em estado superexcitado, as vantagens dos motores síncronos também incluem:
1) A velocidade do motor síncrono segue estritamente n=60f/p, permitindo um controle preciso da velocidade.
2) Oferecem alta estabilidade operacional; no caso de uma queda repentina na tensão da rede, o sistema de excitação normalmente reforça a excitação para garantir uma operação estável, enquanto o torque de um motor de indução (proporcional ao quadrado da tensão) diminuiria significativamente.
3) A capacidade de sobrecarga é maior que a de um motor de indução comparável.
4) Possuem alta eficiência operacional, principalmente no caso de motores síncronos de baixa velocidade.
Os motores síncronos não podem partir diretamente; eles exigem inicialização por indução ou conversão de frequência. A partida por indução refere-se ao processo em que um enrolamento de partida semelhante ao enrolamento de gaiola de esquilo de um motor de indução é instalado no rotor do motor síncrono.
Um resistor suplementar com valor de resistência cerca de dez vezes maior que o do enrolamento de excitação é conectado em série no circuito de excitação para formar um circuito fechado, permitindo que o estator do motor síncrono seja conectado diretamente à rede.
O motor então dá partida como um motor de indução e quando a velocidade atinge a velocidade subsíncrona (95%), o resistor adicional é desconectado. O início da conversão de frequência não é elaborado aqui. Conseqüentemente, uma das desvantagens dos motores síncronos é a necessidade de equipamentos adicionais para partida.
Um motor síncrono opera com corrente de excitação. Sem excitação, o motor é assíncrono. A excitação é um sistema de corrente contínua aplicado ao rotor, com velocidade de rotação e polaridade consistente com o estator.
Se houver problemas com a excitação, o motor perderá a sincronia, não conseguirá ajustar e acionará um mecanismo de proteção, fazendo com que o motor desarme devido a “falha de excitação”. Portanto, outra desvantagem dos motores síncronos é a necessidade de um dispositivo de excitação adicional.
Anteriormente, isso era fornecido diretamente por um motor CC, mas agora é fornecido principalmente por retificação de tiristores. Como diz o ditado, quanto mais complexa a estrutura e mais equipamentos, mais pontos potenciais de falha, portanto, maior taxa de falhas.
Com base nas características de desempenho dos motores síncronos, suas aplicações são encontradas principalmente em talhas, retificadoras, ventiladores, compressores, laminadores, bombas de água e outras cargas.
Em resumo, o princípio para a seleção de um motor é que, desde que o desempenho do motor atenda aos requisitos do maquinário de produção, deve ser dada prioridade a motores com estruturas mais simples, preços mais baixos, operação confiável e manutenção conveniente.
Nesse aspecto, os motores CA são superiores aos motores CC, os motores de indução CA são superiores aos motores síncronos CA e os motores de indução de gaiola de esquilo são superiores aos motores de indução de rotor enrolado.
Para máquinas de produção funcionando continuamente com cargas constantes e sem requisitos especiais para partida ou frenagem, é preferível usar um motor de indução de gaiola de esquilo padrão, que é amplamente utilizado em máquinas, bombas de água, ventiladores e muito mais.
Máquinas de produção que requerem partidas e paradas frequentes e exigem alto torque de partida e frenagem, como pontes rolantes, guinchos de minas, compressores de ar e laminadores irreversíveis, devem usar um motor de indução de rotor enrolado.
Nos casos em que não há necessidade de ajuste de velocidade, sendo necessária velocidade constante ou melhoria do fator de potência, devem ser utilizados motores síncronos. Eles são adequados para bombas de água de média e grande capacidade, compressores de ar, talhas, retificadoras e muito mais.
Para máquinas de produção que exigem uma faixa de ajuste de velocidade superior a 1:3 e que necessitam de regulação de velocidade suave e estável, é recomendado o uso de motores CC excitados separadamente ou motores de indução de gaiola de esquilo ou motores síncronos com controle de velocidade de frequência. Eles são adequados para máquinas-ferramentas de grande precisão, plainas de pórtico, laminadores, guinchos e muito mais.
Máquinas de produção que exigem alto torque de partida e possuem propriedades mecânicas suaves devem utilizar motores CC excitados em série ou compostos. Eles são ideais para veículos elétricos, locomotivas elétricas, guindastes pesados e muito mais.
2. Potência nominal
A potência nominal de um motor elétrico refere-se à sua potência de saída, também conhecida como potência ou capacidade do eixo, que é um parâmetro característico do motor. Quando as pessoas perguntam sobre o tamanho do motor, geralmente se referem à potência nominal e não às dimensões físicas.
A potência nominal é a métrica mais importante ao quantificar a capacidade de carga do motor e é um parâmetro necessário ao selecionar um motor.
(Onde Pn refere-se à potência nominal, Un refere-se à tensão nominal, In refere-se à corrente nominal, cosθ é o fator de potência e η é a eficiência)
O princípio de escolha da capacidade correta do motor deve basear-se na premissa de que o motor pode atender aos requisitos de carga do maquinário de produção e decidir a potência do motor da maneira mais econômica e razoável.
Se a potência for escolhida muito alta, isso resultará em um aumento no investimento e no desperdício de equipamentos, e o motor muitas vezes funcionará com subcarga, resultando em baixa eficiência e fator de potência. Por outro lado, se a potência for escolhida muito baixa, o motor funcionará sobrecarregado, causando danos prematuros.
Existem três fatores principais que determinam a potência de um motor:
1) O aquecimento e o aumento da temperatura do motor, que é o fator mais importante na determinação da potência do motor;
2) Capacidade de sobrecarga de curto prazo do motor;
3) Para motores assíncronos de gaiola de esquilo, a capacidade de partida também deve ser considerada.
Em primeiro lugar, a maquinaria de produção específica, com base no aquecimento, aumento de temperatura e requisitos de carga, calcula e seleciona a potência de carga. O motor então seleciona preliminarmente a potência nominal com base na potência da carga, ciclo de trabalho e requisitos de sobrecarga.
Após pré-selecionada a potência nominal do motor, ele precisa passar por verificações de aquecimento, capacidade de sobrecarga e, quando necessário, capacidade de partida. Se alguma dessas verificações falhar, o motor deverá ser selecionado novamente e verificado novamente até que todos os parâmetros sejam aprovados.
Portanto, o ciclo de trabalho também é um requisito necessário a ser fornecido. Caso não haja exigência, será processado de acordo com o ciclo de trabalho S1 mais comum; motores com requisitos de sobrecarga também precisam fornecer os múltiplos de sobrecarga e o tempo de operação correspondente; motores assíncronos de gaiola de esquilo que acionam cargas de alta inércia, como ventiladores, também precisam fornecer o momento de inércia da carga e a curva de torque de partida para verificações de capacidade de partida.
Todas as seleções de potência nominal mencionadas acima são realizadas sob a premissa de uma temperatura ambiente padrão de 40°C. Caso a temperatura ambiente onde o motor opera mude, a potência nominal do motor deverá ser revisada.
Com base em cálculos teóricos e na prática, em diferentes temperaturas ambientes, a potência do motor pode aumentar ou diminuir aproximadamente de acordo com a tabela abaixo.
Assim, em áreas com climas rigorosos, a temperatura ambiente também deve ser fornecida. Por exemplo, na Índia, a temperatura ambiente precisa ser verificada em 50°C.
Além disso, a altitude elevada também pode afetar a potência do motor; quanto maior a altitude, maior será o aumento da temperatura do motor e menor será a potência de saída. Os motores usados em grandes altitudes também precisam considerar os efeitos da descarga corona.
Quanto à faixa atual de potência do motor no mercado, forneço os seguintes dados da tabela de desempenho da minha empresa para referência:
- Motor DC: ZD9350 (moedor) 9350kW
- Motor Assíncrono: Tipo Gaiola de Esquilo YGF1120-4 (Ventilador de Alto Forno) 28000kW
- Rotor enrolado tipo YRKK1000-6 (moedor de matéria-prima) 7400kW
- Motor Síncrono: TWS36000-4 (Ventilador de Alto Forno) 36000kW (Uma unidade de teste atingiu 40000kW)
3. Tensão nominal
A tensão nominal de um motor refere-se à tensão da linha sob suas condições nominais de operação. A escolha da tensão nominal do motor depende da tensão de alimentação do sistema de potência da instalação e da capacidade do motor.
A seleção da classificação de tensão para motores CA depende principalmente do nível de tensão de alimentação no local de uso. A rede comum de baixa tensão é 380 V, portanto a tensão nominal é normalmente 380 V (conexão Y ou Δ), 220/380 V (conexão Δ/Y) ou 380/660 V (conexão Δ/Y).
Quando a potência dos motores de baixa tensão atinge um determinado nível (como 300KW/380V), torna-se difícil ou muito caro aumentar a corrente devido à limitação da capacidade do fio.
Nesses casos, é necessário obter alta potência aumentando a tensão. A tensão de alimentação normal para a rede de alta tensão é 6.000 V ou 10.000 V, mas em países estrangeiros também existem níveis de tensão de 3.300 V, 6.600 V e 11.000 V.
Os motores de alta tensão têm a vantagem de alta potência e forte resistência ao choque. No entanto, eles também têm a desvantagem da alta inércia, dificultando a partida e a frenagem.
A tensão nominal de um motor CC também precisa corresponder à tensão da fonte. Geralmente é 110V, 220V ou 440V. O nível de tensão comumente usado é 220V, mas para motores de alta potência, pode ser aumentado para 600–1000V.
Quando a fonte de alimentação CA é 380V e um circuito de retificação de silício controlável por ponte trifásica é usado para fonte de alimentação, a tensão nominal do motor CC deve ser ajustada em 440V. Se for alimentado por uma fonte de retificação de silício controlável de meia onda trifásica, a tensão nominal do motor CC deverá ser 220V.
4. Velocidade nominal
A velocidade nominal de um motor elétrico refere-se à sua velocidade sob condições operacionais designadas.
Tanto o motor elétrico quanto o maquinário que ele aciona têm velocidades nominais próprias. Ao escolher a velocidade de um motor elétrico, deve-se considerar que uma velocidade muito baixa não é desejável. Isso porque quanto menor a velocidade nominal de um motor elétrico, mais estágios ele possui, resultando em maior tamanho e maior custo.
Simultaneamente, a velocidade do motor eléctrico não deve ser demasiado elevada, pois isso complicaria o mecanismo de transmissão e dificultaria a sua manutenção.
Além disso, a uma potência fixa, o torque do motor é inversamente proporcional à velocidade.
Para aqueles com baixos requisitos de partida e frenagem, uma comparação abrangente pode ser feita a partir das perspectivas de investimento inicial, ocupação de espaço e custos de manutenção, considerando diversas velocidades nominais diferentes e, em seguida, a velocidade nominal final pode ser determinada.
Para quem dá partida, freia e dá ré com frequência, mas o tempo de transição tem pouco impacto na produtividade, a relação de velocidade e a velocidade nominal do motor elétrico são escolhidas principalmente para minimizar as perdas no processo de transição, além de considerar o investimento inicial. Por exemplo, motores de elevadores, que requerem reversões frequentes e possuem alto torque, possuem baixa velocidade. Isso resulta em um motor de grande tamanho e alto custo.
Quando a velocidade do motor for alta, deve-se considerar também a velocidade crítica do motor. Cada rotor do motor vibra durante a operação e a amplitude do rotor aumenta com a velocidade.
A uma certa velocidade, a amplitude atinge o seu máximo (também conhecido como ressonância), e além desta velocidade, a amplitude diminui gradualmente com o aumento da velocidade e estabiliza dentro de uma certa faixa. Essa velocidade, onde a amplitude do rotor está no máximo, é conhecida como velocidade crítica do rotor.
Esta velocidade é igual à frequência natural do rotor. À medida que a velocidade continua a aumentar e se aproxima do dobro da frequência natural, a amplitude aumentará novamente. A velocidade igual ao dobro da frequência natural é chamada de velocidade crítica de segunda ordem. Isso continua com a terceira ordem, quarta ordem e assim por diante.
Se o rotor operar na velocidade crítica, ocorrerão vibrações severas e a flexão do eixo aumentará acentuadamente, o que, com o tempo, pode resultar em deformação por flexão severa ou até mesmo na quebra do eixo. A velocidade crítica de primeira ordem de um motor é geralmente acima de 1.500 rpm, portanto o impacto da velocidade crítica geralmente não é considerado para motores convencionais de baixa velocidade.
Por outro lado, para motores 2 pólos de alta velocidade, com velocidade nominal próxima a 3000 rpm, o impacto deste efeito deve ser considerado, e o motor não deve ser operado na velocidade crítica por um período prolongado.
De modo geral, o tipo de carga acionada, a potência nominal, a tensão nominal e a velocidade nominal do motor podem determinar aproximadamente o motor.
No entanto, se você deseja atender de forma ideal aos requisitos de carga, esses parâmetros básicos estão longe de ser suficientes.
Os parâmetros adicionais necessários incluem frequência, ciclo de trabalho, requisitos de sobrecarga, classe de isolamento, classe de proteção, inércia rotacional, curva de torque de carga, método de instalação, temperatura ambiente, altitude, requisitos externos, etc., fornecidos de acordo com circunstâncias específicas.
4. Manutenção do Motor
Em caso de funcionamento ou mau funcionamento do motor, quatro métodos podem ser utilizados para prevenir e corrigir o problema em tempo hábil, garantindo assim o funcionamento seguro do motor.
1. Olhar
Observe quaisquer anormalidades durante a operação do motor, que são indicadas principalmente pelos seguintes cenários:
1). Se o enrolamento do estator sofrer um curto-circuito, o motor poderá produzir fumaça.
2). Se o motor operar sob sobrecarga severa ou perda de fase, a velocidade diminuirá e um som alto de “zumbido” será ouvido.
3). Se a rede de manutenção do motor funcionar normalmente, mas parar repentinamente, poderão ser observadas faíscas em partes soltas da fiação. Isso pode ser devido a um fusível queimado ou a um componente preso.
4). Se o motor vibrar excessivamente, pode ser devido a um dispositivo de transmissão preso, má fixação do motor ou parafuso de pé solto.
5). Descoloração, marcas de queimadura e marcas de fumaça nos contatos internos e nas conexões do motor podem indicar superaquecimento local, mau contato nas conexões dos condutores ou queima dos enrolamentos.
2. Ouvir
O motor deve emitir um som de “zumbido” uniforme e leve durante a operação normal, sem quaisquer ruídos adicionais ou sons especiais. Se o nível de ruído for muito alto, incluindo eletromagnético, rolamento, ventilação, atrito mecânico, etc., isso pode indicar um possível problema ou mau funcionamento.
(1) Para ruído eletromagnético, se o motor produzir um som alto e pesado, as possíveis causas são:
- Entreferro irregular entre o estator e o rotor, resultando em sons altos e baixos com um intervalo consistente. Isso pode ser causado pelo desgaste do rolamento, levando à não concentricidade do estator e do rotor.
- Corrente trifásica desequilibrada, que pode ser causada por aterramento incorreto, curto-circuito ou mau contato do enrolamento trifásico. Se o som for abafado, pode indicar que o motor está significativamente sobrecarregado ou fora de fase.
- Núcleo de ferro solto, causado pela vibração afrouxando os parafusos de fixação do núcleo de ferro, resultando em ruído de afrouxamento da chapa de aço silício.
(2) O som dos rolamentos deve ser monitorado regularmente durante a operação do motor. Isso pode ser feito pressionando uma extremidade de uma chave de fenda contra a instalação do rolamento e segurando a outra extremidade perto do ouvido para ouvir o som de funcionamento.
Se o rolamento estiver operando normalmente, ele deverá produzir um som de “farfalhar” contínuo e pequeno, sem quaisquer alterações de alto para baixo ou sons de fricção metálica.
- Um som de “guincho” indica atrito do metal, normalmente causado pela falta de óleo no rolamento. O rolamento deve ser desmontado e reabastecido com uma quantidade adequada de graxa.
- Um som de “bombeamento” é o resultado da rotação da esfera, geralmente causado por graxa seca ou falta de óleo. Mais graxa pode ser adicionada conforme necessário.
- Um som de “clique” ou “rangido” é devido ao movimento irregular da esfera no rolamento, causado por danos na esfera ou secagem da graxa lubrificante após um longo período de inatividade.
(3) Se o mecanismo de transmissão e o mecanismo acionado produzirem um som contínuo, em vez de incerto, isso poderá ser causado pelo seguinte:
- Um som de “estalo” periódico é causado por uma junta de correia irregular.
- Um som de “baque” periódico é causado por folga entre o acoplamento ou polia e o eixo, ou desgaste da chaveta ou rasgo de chaveta.
3. Cheiro
Falhas em um motor podem ser detectadas e evitadas usando o sentido do olfato.
Para verificar se há falhas, abra a caixa de junção e cheire-a em busca de odores queimados ou incomuns.
Se houver cheiro de tinta, pode indicar que a temperatura interna do motor está muito alta.
Se houver um cheiro forte e pungente ou um cheiro de queimado, isso pode indicar que o isolamento ou o enrolamento foram danificados.
Mesmo que não haja odor perceptível, ainda é importante medir a resistência de isolamento entre o enrolamento e a carcaça usando um megômetro.
Se a resistência de isolamento for inferior a 0,5 trilhão de ohms, o motor deverá ser seco. Um valor de resistência zero indica que o motor foi danificado.
4. Tocar
Medir a temperatura de várias partes do motor também pode ajudar a diagnosticar falhas.
Por razões de segurança, é melhor usar as costas da mão para tocar a carcaça do motor e as peças próximas ao rolamento ao verificar a temperatura.
Se for detectada uma temperatura anormal, pode ser devido a vários motivos, como:
- Má ventilação, como se o ventilador tivesse caído ou o duto de ventilação estivesse bloqueado.
- Superaquecimento do enrolamento do estator devido a corrente excessiva.
- Falha de curto-circuito entre espiras do enrolamento do estator ou desequilíbrio de corrente trifásica.
- Partidas ou frenagens frequentes.
Se a temperatura ao redor do rolamento for excessivamente alta, isso poderá ser causado por danos no rolamento ou falta de óleo lubrificante.
Regulamentos sobre temperatura do rolamento do motor e causas de anormalidades e soluções
De acordo com os regulamentos, a temperatura máxima dos rolamentos não deve exceder 95°C e a temperatura máxima dos rolamentos deslizantes não deve exceder 80°C, com um aumento de temperatura não superior a 55°C (calculado como a diferença entre a temperatura do rolamento e a temperatura ambiente durante o teste ).
As possíveis causas e soluções para o aumento excessivo de temperatura nos rolamentos incluem:
- Eixo torto ou linha central imprecisa – realinhe o centro.
- Parafusos de fundação soltos – aperte os parafusos.
- Óleo lubrificante sujo – substitua o óleo.
- Óleo lubrificante velho – limpe o rolamento e substitua o óleo.
- Esfera ou rolo danificado no rolamento – substitua o rolamento.
Para a seção de soluções, as seguintes revisões devem ser feitas:
- Substitua os componentes danificados (fusível, resistor de carga, etc.) dentro do módulo abrindo a tampa.
- Substitua quaisquer placas filhas luminosas ou diodos de proteção danificados.
- Certifique-se de que a fibra óptica esteja conectada corretamente conforme indicado e substitua se estiver danificada.
- Substitua a placa de alimentação do módulo.







