1. Introdução
Na prática de engenharia, existem dois métodos comumente usados para avaliar o erro de retilineidade dos trilhos-guia: o método de conexão de dois pontos finais e o método de condição mínima.
O método de conexão de dois pontos finais conecta a curva de erro de ponta a ponta e, em seguida, desenha duas linhas paralelas à linha de ponta a ponta nos pontos mais altos e mais baixos da curva e mede os valores ao longo do eixo vertical entre o duas linhas paralelas.
Após o processamento dos dados, o valor é o erro de retilineidade do trilho-guia.
O método da condição mínima conecta os pontos “alto, alto” (ou “baixo, baixo”) da curva de erro e traça uma linha paralela a ele através do ponto baixo (alto).
O valor medido entre as duas linhas paralelas ao longo do eixo vertical é o erro de retilineidade do trilho-guia após o processamento dos dados.
O método da condição mínima é uma avaliação de arbitragem.
O método de conexão de dois pontos finais não é uma avaliação de arbitragem, mas é comumente usado na produção devido à sua simplicidade e conveniência na avaliação, embora às vezes possa produzir grandes erros.
Este artigo discute o valor limite do erro gerado entre esses dois métodos de avaliação.
2. A curva de erro está do mesmo lado que ambas as extremidades da linha
Medindo o erro de retilinidade de um determinado modelo de guia de trilho deslizante hidráulico, a curva de erro de retilinidade foi obtida conforme mostrado na Figura 1.
Como pode ser visto na figura, a curva de erro está do mesmo lado de ambas as extremidades da linha.
Abaixo, o valor do erro de retilineidade do trilho-guia será avaliado usando o método de condição mínima e o método de conexão de duas extremidades.

(1) Avaliação do erro de retilinidade usando o método de condição mínima
De acordo com o método da condição mínima, os pontos mais baixos 1 e 2 da curva da Figura 1 (com o ponto mais baixo 1 coincidindo com a origem) são conectados pela linha a1a1 conforme mostrado na Figura 2.
A linha paralela a2a2 é traçada através do ponto mais alto 3 em relação à linha a1a1.
O valor medido ao longo do eixo y na região delimitada pelas duas linhas paralelas a1a1 e a2a2, após o processamento dos dados, representa o erro de retilineidade do trilho guia δ obtido pelo método de condição mínima.
(2) Avaliação do erro de retilinidade usando o método de conexão de duas extremidades
De acordo com o método de conexão de duas extremidades, as extremidades da curva na Figura 1 são também os pontos finais 1 e 2 da curva, conforme mostrado na Figura 3.
Os pontos finais 1 e 2 são conectados pela linha b1b1 e, em seguida, uma linha paralela b2b2 é traçada através do ponto mais alto.
O valor medido ao longo do eixo y na região delimitada pelas duas linhas paralelas b1b1 e b2b2, após o processamento dos dados, representa o erro de retilineidade do trilho guia δ obtido pelo método de conexão de duas extremidades.


(3) Determinação do limite de erro gerado pelos dois métodos de avaliação
Como ambos os métodos de avaliação são usados para determinar o erro de retilinidade do mesmo trilho guia, o “ponto baixo 1”, “ponto baixo 2” e “ponto alto 3” na Figura 2 correspondem respectivamente ao “ponto final 1”, “ ponto final 2” e “ponto alto 3” na Figura 3. Isso faz com que a linha a1a1 coincida com a linha b1b1 e a linha a2a2 coincida com a linha b2b2.
Portanto, o valor do erro gerado pelos dois métodos de avaliação é zero.

Com base na análise acima, quando a curva de erro está do mesmo lado de ambas as extremidades da linha, o limite de erro gerado pelos dois métodos de avaliação é zero, o que significa que os resultados da avaliação obtidos pelos dois métodos são iguais.
3. A curva de erro está em ambos os lados da linha que conecta as extremidades
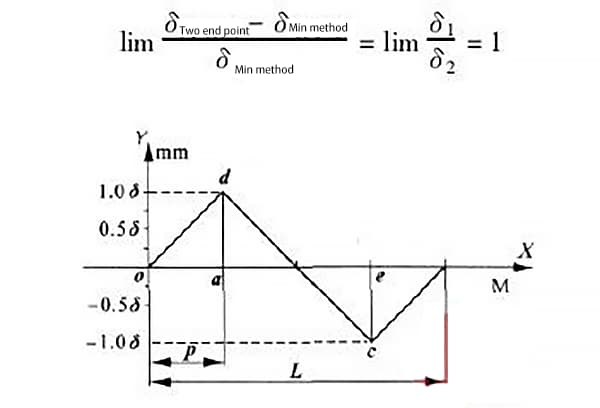
Na curva de erro de retilineidade medida de um trilho-guia, algumas curvas de erro estão em ambos os lados da linha que conecta as extremidades, conforme mostrado na Figura 4.
A curva de erro deste trilho guia possui uma linha conectando suas extremidades coincidindo com o eixo x. O erro de retilineidade do trilho guia será avaliado usando o método de condição mínima e o método de conexão de duas extremidades.
Como pode ser visto na Figura 4, os pontos o e c são os dois pontos baixos e os dois pontos finais da curva, enquanto o ponto d é o ponto mais alto.

De acordo com o método da condição mínima, os pontos o e c são conectados pela linha a1a1 conforme mostrado na Figura 5. A linha a2a2 é traçada paralelamente à linha a1a1 através do ponto mais alto d.
O valor medido ao longo do eixo y na região delimitada pelas duas linhas paralelas a1a1 e a2a2, após o processamento dos dados, representa o erro de retilineidade do trilho guia δ obtido pelo método de condição mínima.

De acordo com o método de conexão de dois pontos, desenhe duas linhas paralelas ao eixo x passando pelos pontos C e D respectivamente.
Essas linhas são representadas pelas linhas pontilhadas b1b1 e b2b2 na Figura 5. Na região delimitada por essas duas linhas paralelas, o valor medido ao longo do eixo y, após o processamento dos dados, representa o valor do erro de retilineidade do trilho-guia entre as duas extremidades pontos.
Para determinar o método do desvio mínimo e o valor do desvio nos dois pontos finais, desenhe uma linha paralela ao eixo y passando pelo ponto D, cruzando o eixo no ponto A, cruzando a linha a1a1 no ponto H e cruzando a linha b1b1 no ponto F.
Da mesma forma, desenhe uma linha paralela ao eixo y passando pelo ponto C, cruzando o eixo no ponto E.
(1) Determinação do erro de retilinidade usando o método de condição mínima
De acordo com o método de condição mínima, o valor do erro de retilineidade δ do trilho-guia é derivado do valor medido ao longo do eixo y após o processamento dos dados, que representa o método de desvio mínimo.
Conforme mostrado na Figura 5:

E como BD = BA + AD,

∆OAB e ∆OEC são dois triângulos semelhantes, portanto,

Reorganizando a equação (3), obtemos:

Substituindo a equação (4) na equação (2) e reorganizando, obtemos:

(2) Determinação do erro de retilinidade usando o método de conexão de dois pontos
De acordo com o método de conexão de dois pontos, o valor medido ao longo do eixo y após o processamento dos dados representa o valor do erro de retilineidade δ do trilho-guia entre os dois pontos finais.
Conforme mostrado na Figura 5:

E como fa = ce,

(3) Cálculo dos valores de erro gerados por dois métodos de avaliação
Equação (6) menos equação (5), ou seja,

Reorganizando, obtemos:

(4) Cálculo do erro máximo gerado por dois métodos de avaliação
Na Figura 5, seja ad = δ1, ce = δ2, oa = p; seja l o comprimento do trilho guia que está sendo medido, então oe = l – p, e:

Por exemplo, quando p = 0,5m (ou seja, o passo é 0,5m), δ1 = 1,0δ, δ2 = 0,25δ, e o comprimento do trilho guia medido é l – 2m, então a razão de erro gerada pelas duas avaliações métodos é:

A razão de erro gerada pelos dois métodos de avaliação é de 0,154, o que significa que o erro gerado pelo método de conexão de dois pontos é 15,4% maior que o gerado pelo método de condição mínima.
Na equação acima, quando ![]() ou seja, os pontos mais alto e mais baixo da curva de erro estão infinitamente distantes um do outro, então
ou seja, os pontos mais alto e mais baixo da curva de erro estão infinitamente distantes um do outro, então![]() então obtemos:
então obtemos:

Por exemplo, quando δ1 = 1,0δ e δ2 = 0,25δ e a distância entre os pontos mais alto e mais baixo da curva de erro é infinitamente distante (ou seja, L = 0,25), então a razão de erro gerada pelos dois métodos de avaliação é ![]() o que significa que o erro gerado pelo método de conexão de dois pontos é 25% maior que o gerado pelo método de condição mínima.
o que significa que o erro gerado pelo método de conexão de dois pontos é 25% maior que o gerado pelo método de condição mínima.
Quando δ1 = δ2, ou seja, a distância entre os pontos mais alto e mais baixo da curva de erro é igual, conforme mostrado na Figura 6, então os valores máximos de erro gerados pelos dois métodos de avaliação são:
A partir disso, percebe-se que quando os pontos mais alto e mais baixo do trilho-guia são iguais e infinitamente distantes um do outro, o erro máximo gerado pelos dois métodos de avaliação é o maior e pode chegar a 100%.
A Tabela 1 lista a proporção de erros gerados pelos dois métodos de avaliação para diferentes comprimentos do trilho-guia medido, quando os pontos da curva de erro são distribuídos em ambos os lados da linha de conexão de dois pontos.
A distância entre os pontos mais alto e mais baixo da curva de erro é igual quando o passo de medição p = 0,5.
Tabela 1 Razão de erro dos dois métodos de avaliação
| Taxa de erro | Distância L (M) entre os pontos mais alto e mais baixo do trilho-guia | ||||||
| 1 | 10 | 15 | 20 | 25 | 30 | 40 | ∞ |
| 33,30% | 90% | 93,30% | 95% | 96% | 96,70% | 97,50% | |
4. Conclusão
Se os pontos da curva de erro de retilinidade estiverem do mesmo lado da linha de ligação de dois pontos, então os erros gerados pelos dois métodos de avaliação são zero, ou seja, os resultados obtidos pelos dois métodos de avaliação são iguais.
Se os pontos na curva de erro de retilineidade estiverem em ambos os lados da linha de conexão de dois pontos, e os pontos mais alto e mais baixo da curva de erro forem iguais e infinitamente distantes um do outro, então o erro máximo gerado pelos dois métodos de avaliação é o maior , e o erro gerado pelo método de conexão de dois pontos pode ser 100% maior que o gerado pelo método de condição mínima.
Portanto, ao avaliar o erro de retilineidade de trilhos-guia de máquinas-ferramentas de grande porte na produção prática, é muito importante escolher o método de avaliação apropriado. Quando os pontos na curva de erro estão em ambos os lados da linha de conexão de dois pontos, o método da condição mínima deve ser usado como primeira escolha para avaliação.