
Atualmente, a indústria transformadora está a experienciar um aumento na automação e na inteligência, com o rápido desenvolvimento de robôs industriais conduzindo a uma maior maturidade na sua aplicação nos campos de processamento e produção.
Deve-se notar que estas não são as únicas aplicações dos robôs industriais.
As possibilidades para robôs industriais são limitadas apenas pela imaginação.
Soldagem a arco

Os robôs de soldagem a arco são categorizados em dois tipos principais: soldagem com eletrodo de fusão e soldagem com eletrodo sem fusão. Esses robôs possuem características únicas, como a capacidade de realizar operações de soldagem de longo prazo, alta produtividade e alta qualidade e estabilidade consistentes nos processos de soldagem.
Soldagem a ponto

O robô de soldagem a ponto opera seguindo as ações, sequências e parâmetros descritos em suas instruções programadas. Todo o processo é totalmente automatizado e inclui interface de comunicação com dispositivos externos.
Essa interface permite que o robô receba comandos de controle de um computador mestre ou sistema de gerenciamento de nível superior, permitindo que ele execute seu trabalho.
Soldagem a laser

A soldagem a laser é conhecida por causar deformação mínima na peça a ser soldada, resultando em praticamente nenhuma folga na junta e em uma alta relação entre profundidade e largura da solda. Isto resulta numa soldadura de maior qualidade em comparação com os métodos de soldadura tradicionais.
Corte a laser
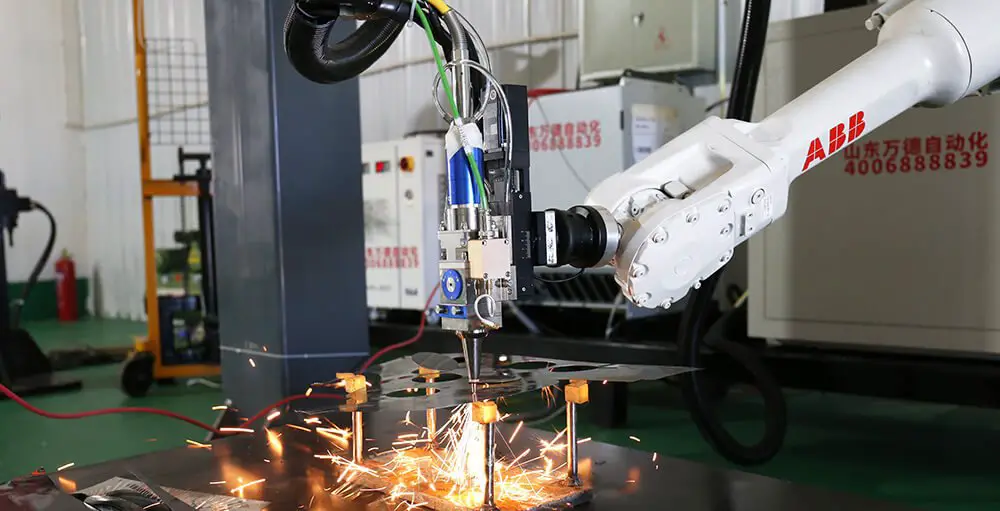
Os sistemas robóticos de corte a laser são caracterizados por duas características principais: a capacidade dos robôs industriais de realizar trajetórias complexas de processamento de curvas 3D de maneira livre e flexível e o uso de fibras laser flexíveis e de transmissão de longa distância como meio de transmissão, o que não limita o amplitude de movimento do robô.
Carregamento e descarregamento da máquina

Os sistemas robóticos de carga e descarga são conhecidos por sua alta eficiência, estabilidade, simplicidade e facilidade de manutenção. Eles podem ser utilizados para uma ampla gama de produtos, permitindo aos usuários ajustar rapidamente as estruturas dos produtos e expandir a capacidade de produção. Isso resulta em uma redução significativa na intensidade de trabalho dos trabalhadores industriais.
Forjamento

O robô de forjamento é automatizado através do uso de controle e programação avançados de computador. É capaz de substituir totalmente o trabalho manual nas tarefas contínuas e repetitivas de carga, torneamento e descarga no processo produtivo de forjamento. Isso leva à redução da intensidade e periculosidade do trabalho, bem como ao aumento do grau de automação e eficiência do processo produtivo.
Rebarbação

O robô rebarbador é o resultado de uma combinação de várias disciplinas, incluindo máquinas mecânicas e de precisão, microeletrônica e computadores, controle e acionamento automático, sensores e processamento de informações e inteligência artificial. Ele representa os últimos avanços nesses campos.
Estampagem

Robôs de estampagem, usados em manipuladores, aprimoram a automação na transferência de materiais, carga e descarga de peças, troca de ferramentas e montagem de máquinas. Isto resulta no aumento da produtividade do trabalho, na redução dos custos de produção e num ritmo mais rápido de mecanização e automação da produção industrial.
Cola

A utilização de robôs na colagem e distribuição melhorou significativamente a eficiência, poupando uma quantidade considerável de mão-de-obra e reduzindo os custos de mão-de-obra. O investimento nesta tecnologia normalmente será recuperado dentro de um ano de operação, e o robô continuará a funcionar por pelo menos dez anos com manutenção adequada.
À medida que as linhas de colagem totalmente automatizadas e de alto volume se tornam mais predominantes, espera-se que as perspectivas de mercado e o potencial de desenvolvimento para sistemas de colagem cresçam.
Montagem

Os robôs de montagem são um componente crucial de sistemas de montagem automatizados flexíveis e consistem em um operador de robô, controlador, efetor final e sistema de detecção. As estruturas do operador vêm em vários tipos, incluindo junta horizontal, coordenada em ângulo reto, multijunta e coordenada cilíndrica.
Os controladores normalmente utilizam sistemas de computador com múltiplas CPUs ou vários estágios para controlar o movimento e realizar a programação do movimento. Os efetores finais são projetados para se adaptarem a diferentes objetos de montagem, como pinças e pulsos.
O sistema de detecção coleta informações sobre a interação entre o robô de montagem, seu ambiente e o objeto de montagem.
Robôs' visão
A visão robótica é um aspecto crucial de qualquer sistema robótico. Ele permite que os robôs adquiram imagens bidimensionais do seu ambiente através do uso de sensores de visão, que são então analisadas e interpretadas por processadores de visão. A informação processada é então traduzida em símbolos, permitindo ao robô reconhecer objetos e determinar a sua localização.
Pulverização

Os robôs de pulverização, também conhecidos como robôs de pintura em spray, são robôs industriais que podem automatizar o processo de pintura em spray ou aplicação de outros revestimentos.
Os principais benefícios do uso de robôs de pintura em spray incluem:
(1) Flexibilidade excepcional e uma ampla gama de capacidades de trabalho.
(2) Melhor qualidade de pulverização e utilização de material.
(3) Fácil operação e manutenção, com recursos de programação offline que reduzem significativamente o tempo de comissionamento em campo.
(4) Alta taxa de utilização de equipamentos, com robôs de pulverização normalmente tendo uma taxa de utilização de 90% a 95%.
Ordenação

Um robô de classificação é um robô que utiliza sensores, espelhos objetivos e sistemas óticos eletrônicos para classificar mercadorias com eficiência.
Os robôs de classificação automática tornaram-se amplamente utilizados. Por exemplo, o Japão desenvolveu um dispensador automático de maçãs que pode separar até 540 maçãs por minuto com base na cor, brilho e tamanho, e distribuí-las em diferentes recipientes.







